一种全自动除膜机的制作方法
1.本技术涉及拆包设备的技术领域,尤其是涉及一种全自动除膜机。
背景技术:
2.物品在批量的运输过程中,一般会使用打包带和包装膜将多件物品绑扎在一起,方便运输的同时,防止物品在运输过程中松散,减低物品损坏的可能性。
3.当物品运输至仓库后,再将包裹物品的包装膜和打包带依次拆除。为提高物品的拆包效率,目前,市场上已经出现了用于去除包装膜和打包带的除膜设备。
4.目前的除膜设备一般包括传送带机构、割膜装置、脱模装置以及拆带装置。当对物品进行拆包时,将待拆包的物品放置在传送带机构上,传送带机构将物品运输至除膜区域,割膜装置用于将包装膜割开;脱模装置用于将被割破后的包装膜从物品上扯下。
5.当物品脱模后,传送带机构再将物品运输至割带区域,拆带装置一般包括切割机构和脱带机构,切割机构用于将绑扎物品的打包带割断,脱带机构用于将被割断后的打包带从物品上扯下。
6.针对上述中的相关技术,发明人认为存在有以下缺陷:除膜设备的占地面积大,集成化低,物品流转需花费大量时间,影响物品的拆包效率。
技术实现要素:
7.为了提高除膜设备的集成度,以提高物品的拆包效率,本技术提供一种全自动除膜机。
8.本技术提供的一种全自动除膜机采用如下的技术方案:
9.一种全自动除膜机,包括包括输送装置和横跨在输送装置输送方向两侧的机架,所述机架的一侧设置有割膜装置和驱使割膜装置沿竖直方向移动的第一驱动组件;所述机架设置有割膜装置的一侧设置有用于清理破损后的包装膜的第一清理装置,所述机架设置有割膜装置的一侧还设置有活动架和驱使活动架沿竖直方向移动的第二驱动组件,所述活动架上设置有将破损后的包装膜搬运至第一清理装置的搬运装置;所述机架设置有活动架的对侧设置有支撑架和驱使支撑架沿竖直方向移动的第三驱动组件;所述支撑架上设置有拆带装置,所述拆带装置包括用于切割打包带的切割组件和用于夹持打包带的夹持组件,所述夹持组件可开合设置;所述机架设置有支撑架的一侧还设置有用于清理切断后的打包带的第二清理装置,所述支撑架上设置有驱使拆带装置沿朝靠近或远离第二清理装置的方向移动的第四驱动组件。
10.通过采用上述技术方案,当物品需拆包时,将待拆包的物品放置在输送装置上,输送装置将物品输送至拆包区域,第一驱动组件驱使割膜装置沿竖直方向移动,割膜装置将包装膜割破,第二驱动组件驱使活动架移动,以使得搬运装置能够与破损后的包装膜接触,搬运装置将破损后的包装膜从物品上搬运至第一清理装置,从而完成对包装膜的拆除。之后,第三驱动组件驱使支撑架下移,直至切割组件位于指定位置,夹持组件将打包带夹持,
切割组件将打包带割断,夹持组件继续夹持打包带,第四驱动组件驱使拆带装置朝靠近第二清理装置的方向移动,当夹持组件移动至位于第二清理装置的上方后,夹持组件松开,打包带在第二清理装置的作用下从物品上脱落,完成打包带的拆除。整个除膜机高度集成化、自动化,能够显著提高物品的拆包效率。
11.优选的,所述割膜装置包括热风枪和驱使热风枪沿水平方向移动的第一驱动件。
12.通过采用上述技术方案,当切割包装膜时,第一驱动件驱使热风枪朝靠近包装膜的方向移动,热风枪工作吹出高温风,打包膜在高温下融化并出现断口,同时,第一驱动组件驱使热风枪沿竖直方向移动,从而将包裹物品的包装膜切开。
13.优选的,所述搬运装置包括机械臂和安装在机械臂上的气动吸盘,所述活动架上设置有驱使机械臂朝靠近或远离第一清理装置的方向转动的第二驱动件。
14.通过采用上述技术方案,气动吸盘通气从而吸住包装膜,当包装膜被热风枪割开后,第二驱动组件驱使活动架上移,气动吸盘拉扯包装膜,以使得部分包装膜从物品上脱落。当活动架上移至指定位置后,第二驱动件驱使机械臂朝靠近第一清理装置的方向移动,当气动吸盘跟随机械臂转动至位于第一清理装置的上方后,气动吸盘断气,打包带落在第一清理装置上并在第一清理装置的作用下从物品上完全脱落,完成包装膜的拆除。
15.优选的,所述第一清理装置和第二清理装置的结构一致,所述第一清理装置包括固定在机架上的支架和设置在支架上的第一卷筒和第二卷筒,所述第一卷筒与第二卷筒相对设置,所述支架上设置有驱使第一卷筒朝靠近或远离第二卷筒的方向移动的第三驱动件和驱使第二卷筒转动的第四驱动件。
16.通过采用上述技术方案,当机械臂携带包装膜转动至位于第一清理机构上方后,气动吸盘松开包装膜,包装膜在重力作用下落在第一卷筒与第二卷筒之间,第三驱动件驱使第一卷筒朝靠近第二卷筒的方向移动直至第一卷筒与第二卷筒将包装膜夹紧,第四驱动件驱使第二卷筒转动,包装膜在第一卷筒和第二卷筒摩擦力的作用下被抽走,从而实现对包装膜的清理。同理,打包带的清理也是如此,这里不再赘述。
17.优选的,所述机械臂包括第一力臂与第二力臂,所述第一力臂的一端与第二驱动件连接,所述第二力臂与第一力臂远离第二驱动件的一端铰接,所述气动吸盘安装在第二力臂远离第一力臂的一端;所述第二驱动件的输出端连接有联动第二力臂同步转动的联动组件,当吸附包装膜时,所述第一力臂竖直设置,所述第二力臂与第一力臂之间的夹角为直角,所述气动吸盘背离第一力臂设置。
18.通过采用上述技术方案,因初始吸附包装膜时,第一力臂与物品表面之间会存在间距,因此,通过将第二力臂与第一力臂之间的夹角为直角设置,使得气动吸盘能够贴紧物品表面,当气动吸盘吸住包装膜后,第二驱动件驱动第一力臂朝靠近第一清理装置的方向转动,同时,第二驱动件通过联动组件带动第二力臂相对第一力臂转动。当第一力臂转动至水平后,第二力臂与第一力臂之间的夹角则变为180度,从而使得打包带能够越过第一卷筒、第二卷筒的上方,进而使得气动吸盘松开包装膜后,包装膜在重力作用下能够更准确的落在第一卷筒与第二卷筒之间,且不易从第一卷筒与第二卷筒之间滑落。同时,也能够缩减机械臂转动所需的空间,提高除膜机的集成度。
19.优选的,所述输送带机构包括底座和设置在底座上的依次拼接的第一传送带机构、第二传送带机构和第三传送带机构,所述底座上设置有驱使第二传送带机构转动的第
五驱动组件。
20.通过采用上述技术方案,当热风枪将包装膜划破后,第五驱动组件驱使第二传送带机构转动,以配合机械臂和第一清理装置拉扯包装膜,从而提高包装膜的脱模效率。
21.优选的,所述切割组件包括切割刀、夹板和驱使夹板沿竖直方向移动的第五驱动件,所述切割刀的刀头朝向夹板设置;所述夹板包括第一夹持部和位于第二夹持部下方的第二夹持部,所述第一夹持部与第二夹持部的一端固定连接,所述第一夹持部与第二夹持部的另一端之间留有供打包带插入的间隙。
22.通过采用上述技术方案,当切割打包带时,第五驱动件驱使夹板朝靠近物品表面的方向移动,直至第二夹持部与物品外表面抵接,移动切割组件,以使得第二夹持部从物品表面和打包带之间的空隙穿过,当打包带卡接在第一夹持部与第二夹持部之间后,第五驱动件驱使夹板朝远离物品表面的方向移动,打包带跟随夹板移动的过程中与切割刀抵接并被切割刀切断。
23.优选的,所述夹持组件包括将打包带压紧在夹板上的压块和驱动压块沿竖直方向移动的第六驱动件,所述第二夹持部的横截面面积大于第一夹持部的面积,所述压块朝向第二夹持部超出第一夹持部的部分设置。
24.通过采用上述技术方案,当打包带卡接在第一夹持部与第二夹持部之间后,第六驱动件驱使压块朝靠近第二夹持部的方向,压块配合第二夹持部将打包带夹紧,之后,第五驱动件驱使夹板、第六驱动件驱使压块同步上移。当打包带被切断后,压块与第二夹持部继续夹紧打包带,从而在第四驱动组件的作用下能够将打包带运输至第二清理装置所在区域。
25.优选的,所述支撑架上滑动连接有基板,所述第四驱动组件驱动基板朝靠近或远离第二清理机构的方向移动,所述基板竖直转动连接有旋转臂,所述拆带装置设置在旋转臂上,所述基板设置有驱使旋转臂转动的第六驱动组件。
26.通过采用上述技术方案,拆带装置通过旋转臂与基板连接,使得拆带装置能够跟随基板在第四驱动组件的作用下朝靠近或远离第二清理装置的方向移动。同时,拆带装置能够跟随旋转臂在第六驱动组件的作用下能够在一定范围内的水平平面内任意转动,增强了拆带装置的灵活性,以便切割打包带,从而提高打包带的切割效率。
27.优选的,所述旋转臂竖直转动连接有连接杆,所述旋转臂设置有驱使连接杆转动的第七驱动组件,所述连接杆远离旋转臂的一端固定连接有用于安装拆带装置的基台,所述拆带装置设置有多组,多组所述割带圆周均匀分布在基台的外周。
28.通过采用上述技术方案,用于绑扎物品的打包带一般设置有多根,因此,通过设置多组拆带装置,能够利用多组拆带装置将多根打包带依次切割并一次性输送至第二清理机构,以提高物品的拆包效率。
29.综上所述,本技术包括以下至少一种有益技术效果:
30.1.通过割膜装置切割包装膜,搬运装置将切割后的包装膜搬运至第一清理装置,从而完成包装膜的清理;然后,割组件将打包带切割,夹持组件夹住切断后的打包带,并在第四驱动组件的驱使下将打包带运输至第二清理机构,从而完成打包带的清理,整个设备高度集成化、能够同时拆除包裹物品的包装膜和绑扎物品的打包带,显著提高了物品的拆包效率;
31.2.当切割包装膜时,气动吸盘将打包膜吸住,热风枪工作吹出高温风,打包膜在高温下融化并出现断口,然后,机械臂朝靠近第一清理机构的方向转动,从而将包装膜从物品上脱下;
32.3.当切割打包带时,第三气缸驱使夹板下移直至第二夹持部与物品表面接触,第七驱动组件驱使连接杆直至第二夹持部从物品表面和打包带之间的空隙穿过,压块在第四气缸的驱使下将第三气缸打包带压紧在第二夹持部上,第三气缸的活塞杆、第四气缸的活塞杆同步回缩,打包带跟随夹板移动的过程中与切割刀抵接并被切割刀切断,第四驱动组件运转以带动打包带朝靠近第二清理机构的方向移动,从而将打包带从物品上拆下。
附图说明
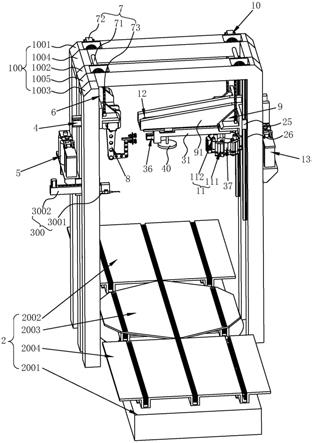
33.图1是本技术的整体结构示意图;
34.图2是本技术中第一清理装置的结构示意图;
35.图3是本技术中隐藏输送装置后的结构示意图;
36.图4是本技术中搬运装置的结构示意图;
37.图5是本技术中第二传送带装置与第五驱动组件的结构示意图;
38.图6是本技术中拆带装置与第四驱动组件配合的结构示意图;
39.图7是本技术中旋转臂与基板的连接示意图;
40.图8是本技术中图7中a的放大示意图;
41.图9是本技术中旋转臂内部和拆带装置的结构示意图。
42.附图标记说明:100、机架;1001、第一龙门架;1002、第二龙门架;1003、立柱;1004、第一连接柱;1005、第二连接柱;200、输送装置;2001、底座;2002、第一传送带机构;2003、第二传送带机构;2004、第三传送带机构;300、割膜装置;3001、热风枪;3002、伺服滑台;400、第一驱动组件;4001、第一带轮;4002、第一同步带;4003、第一驱动电机;5、第一清理装置;51、支架;52、第一卷筒;53、第二卷筒;54、第一气缸;55、第二电机;6、活动架;7、第二驱动组件;71、转杆;72、第二驱动电机;73、拉绳;8、搬运装置;81、机械臂;811、第一力臂;812、第二力臂;82、气动吸盘;83、第一电机;84、联动组件;841、第二带轮;842、第三带轮;843、第二同步带;9、支撑架;91、立板;10、第三驱动组件;11、拆带装置;111、切割组件;1111、第三气缸;1112、夹板;11121、第一夹持部;11122、第二夹持部;1113、切割刀;112、夹持组件;1121、压块;1122、第四气缸;12、第四驱动组件;121、连接轴;122、第四带轮;123、第三同步带;124、第四电机;13、第二清理装置;14、支撑板;15、连接板;16、第一导向条;17、第一滑套;18、第二导向条;19、第二滑套;20、侧板;21、固定块;22、第五驱动组件;221、第三电机;222、第一齿轮组;23、盖板;24、安装架;25、支撑座;25、第三导向条;26、第三滑块;27、基板;28、连接块;29、第四导向条;30、第四滑套;31、旋转臂;32、第六驱动组件;321、第五电机;322、传动齿轮;323、齿轮箱;324、驱动齿轮;33、竖杆;34、限位块;35、连接杆;36、第七驱动组件;361、第六电机;362、减速箱;363、第五带轮;364、第六带轮;365、第四同步带;37、基台;371、底板;372、固定环;38、第一固定板;39、第二固定板;40、托线盘;41、支撑柱。
具体实施方式
43.以下结合附图1
‑
9对本技术作进一步详细说明。
44.本技术实施例公开一种全自动除膜机。参照图1,一种全自动除膜机包括输送装置200和架设在输送装置200输送方向两侧之间的机架100。机架100的一侧设置有割膜装置300和驱动割膜装置300沿竖直方向移动的第一驱动组件400,机架100设置有割膜装置300的一侧设置有用于清理破损的包装膜的第一清理装置5,第一清理装置5用于将破损后的包装膜从物品上扯下。机架100设置有割膜装置300的一侧还设置有活动架6和驱使活动架6沿竖直方向移动的第二驱动组件7,活动架6上设置有用于将破损的包装膜从物品上搬运至第一清理机构的搬运装置8,搬运装置8用于将破损的包装膜搬运至第一清理装置5。
45.参照图1,机架100设置有活动架6的对侧设置有支撑架9和驱使支撑架9沿竖直方向移动的第三驱动组件10,第三驱动组件10的结构与第二驱动组件7的结构一致。支撑架9上设置有拆带装置11和驱动拆带装置11沿水平方向移动的第四驱动组件12。拆带装置11包括用于切割打包带的切割组件111和用于夹持打包带的夹持组件112,夹持组件112可开合设置。机架100设置有支撑的一侧还设置有用于清理打包带的第二清理装置13,第二清理装置13的结构与第一清理装置5的结构一致。当打包带被拆带装置11割断后,断裂的打包带被夹持组件112夹持并在第四驱动组件12的驱使下被运输至第二清理装置13。
46.参照图1,机架100包括依次并排间隔设置的第一龙门架1001和第二龙门架1002以及立柱1003,第一龙门架1001与第二龙门架1002的顶端之间固定连接有第一连接柱1004,第二龙门架1002与立柱1003的顶端之间固定连接有第二连接柱1005。第一龙门架1001与第二龙门架1002均横跨输送装置200,立柱1003设置在输送机构的一侧。
47.参照图2,第一驱动组件400设置在立柱1003与第二龙门架1002之间。立柱1003与第二龙门架1002的两端之间均固定连接有支撑板14,第一驱动组件400包括设置在支撑板14上的第一带轮4001,第一带轮4001与支撑板14转动连接,两个第一带轮4001之间套接有第一同步带4002,靠近立柱1003顶端的支撑板14上安装有驱使第一带轮4001转动的第一驱动电机4003,第一驱动电机4003的输出轴穿透支撑板14并与第一带轮4001固定连接。
48.参照图2,割膜装置300包括设置在立柱1003与第二龙门架1002之间的热风枪3001和驱使热风枪3001沿水平方向移动的第一驱动件。第一驱动件为伺服滑台3002,热风枪3001固定在伺服滑台3002的移动模块上。伺服滑台3002与第一同步带4002之间设置有连接板15,伺服滑台3002固定在连接板15上,连接板15与第一同步带4002固定连接。第一驱动电机4003运转带动第一带轮4001和第一同步带4002转动,从而带动伺服滑台3002和热风枪3001沿竖直方向移动。
49.参照图2和图3,第二龙门架1002靠近立柱1003的一侧还固定连接有对伺服滑台3002起导向作用的第一导向条16,第一导向条16沿第二龙门架1002的高度方向延伸设置,第一导向条16的横截面呈工字型设置,连接板15靠近第二龙门架1002的一侧固定连接有与第一导向条16截面形状配合的第一滑套17,第一滑套17与第一导向条16滑动套接。第一导向条16配合第一滑套17对伺服滑台3002起导向作用,以使得伺服滑台3002在跟随第一同步带4002移动的过程中更加稳定。
50.参照图1和图3,活动架6设置在第一龙门架1001与第二龙门架1002之间,活动架6位于机架100的内侧。第二驱动组件7包括转动插接在第一龙门架1001与第二龙门架1002顶端之间的转杆71,转杆71的一端穿透第一龙门架1001,第一龙门架1001远离第二龙门的一侧安装在驱使转杆71转动的第二驱动电机72,第二驱动电机72的输出轴与转杆71固定连
接。转杆71的两端均绕接固定有拉绳73,拉绳73可采用钢链、铁索等,拉绳73远离转杆71的一端与活动架6固定连接。第二驱动电机72运转以驱使转杆71转动,转杆71转动收卷或放松拉绳73,从而使得活动架6沿竖直方向移动。
51.参照图3,第一龙门架1001与第二龙门架1002靠近活动架6的一侧均固定连接有第二导向条18,第二导向条18的横截面呈工字型设置,活动架6靠近机架100的一侧固定连接有两个与第二导向条18截面形状配合的第二滑套19,第二滑套19与第二导向条18滑动套接。第二导向条18配合第二滑套19对活动架6起导向作用,以使得活动架6在移动的过程中更加稳定。
52.参照图4,搬运装置8包括安装在活动架6上的机械臂81和安装在机械臂81上的气动吸盘82,活动架6上设置有驱使机械臂81转动的第二驱动件。第二驱动件为第一电机83。活动架6上固定连接有两块竖直相对设置的侧板20,第一电机83安装在其中一块侧板20上,第一电机83的输出轴穿透侧板20并与机械臂81固定连接。
53.参照图4,机械臂81包括第一力臂811和第二力臂812,第一力臂811与第一电机83的输出轴固定连接,第二力臂812的一端与第一力臂811远离第一电机83的一端铰接。第二力臂812呈l型设置,气动吸盘82安装在第二力臂812远离第一力臂811的一端。第一力臂811与第二力臂812的转动平面相互平行且均竖直设置。第一电机83的输出轴与第二力臂812之间设置有联动组件84。当吸附包装膜时,第一力臂811竖直设置,第二力臂812与第一力臂811之间的夹持为直角,气动吸盘82背离第一力臂811设置。
54.参照图4,联动组件84包括与第一电机83的输出轴套接固定的第二带轮841、与第二力臂812和第一力臂811的铰接轴转动套接的第三带轮842,第二力臂812与第三带轮842固定连接。第二带轮841与第三带轮842之间套接有第二同步带843。当吸附包装膜时,第一电机83运转以带动第一力臂811朝靠近第一清理装置5的方向转动,同时,第二带轮841同步转动,第二带轮841通过第二同步带843带动第三带轮842转动,从而使得第二力臂812相对第一力臂811转动。当第一力臂811转动至水平时,第二力臂812与第一力臂811之间的夹角为180度,以使得气动吸盘82朝下,从而方便将包装膜下放至第一清理装置5。同时,缩减机械臂81转动所需的空间,提高了除膜机的集成度。
55.参照图2,第一清理装置5包括固定在第一龙门架1001与第二龙门架1002之间的支架51,支架51位于机架100的外侧。支架51上设置竖直相对设置的第一卷筒52和第二卷筒53,第一卷筒52与支架51滑动连接,支架51上设置有驱使第一卷筒52朝靠近或远离第二卷筒53的方向移动的第三驱动件,第三驱动件为第一气缸54。支架51上开有供第一卷筒52滑动的滑槽,第一卷筒52的两端均通过轴承转动连接有固定块21,第一气缸54的缸体部分与支架51固定连接,第一气缸54的活塞杆与其中一块固定块21固定连接。
56.参照图2,支架51上还设置有驱使第二卷筒53转动的第四驱动件,第二卷筒53的转动方向背离机架100设置。第四驱动件为第二电机55,第二电机55的输出轴与第二卷筒53的一端固定连接。当包装膜落在第一卷筒52与第二卷筒53之间后,第一气缸54驱使第一卷筒52朝靠近第二卷筒53的方向移动,第一卷筒52和第二卷筒53将包装膜夹紧,第二电机55运转以驱使第二卷筒53转动,第二卷筒53通过摩擦力带动第一卷筒52与自身转动方向相反的方向转动,包装膜在第一卷筒52与第二卷筒53作用下被逐渐抽走,从而使得包装膜从物品上脱落。
57.参照图1,输送装置200包括底座2001和架设在底座2001上的依次拼接的第一传送带机构2002、第二传送带机构2003和第三传送带机构2004。其中,第二传送带机构2003位于机架100的下方,第二传送带机构2003整机呈圆形设置,底座2001上设置有驱使第二传送带机构2003转动的第五驱动组件22。
58.底座2001上设置有盖板23,第二传送带机构2003固定在盖板23的上表面。底座2001的上表面开设有用于容纳第五驱动组件22的容纳槽,盖板23盖合在容纳槽的开口端并与底座2001的上表面齐平。
59.参照图5,第五驱动组件22包括第三电机221,容纳槽的底部固定连接有用于安装第三电机221的安装架24,容纳槽的底部还固定连接有用于支撑盖板23和第二传送带机构2003的支撑座25,盖板23的下表面中心处固定连接有支撑柱41,支撑柱41与支撑座25转动插接,支撑柱41的一部分位于支撑座25。支撑柱41与第三电机221的输出轴平行设置,第三电机221的输出轴与支撑柱41通过第一齿轮组222传动连接。第三电机221运转以带动第一齿轮组222转动,从而带动支撑柱41相对支撑座25转动,进而带动第二传动带机构和放置在第二传动带机构上的物品转动,从而有利于提高包装膜的脱模效率。
60.参照图1,支撑架9位于第一龙门架1001与第二龙门架1002之间,支撑架9与活动架6相对设置。第一龙门架1001和第二龙门架1002靠近支撑架9的固定连接有第三导向条25,第三导向条25的横截面呈工字设置,支撑架9上固定连接有与第三导向条25横截面形状配合的第三滑套。第三导向条25配合第三滑套对支撑架9起导向作用,以使得支撑架9在滑动过程中更加稳定。
61.参照图6,支撑架9包括两块竖直相对设置的立板91,两块立板91之间滑动连接有基板27,拆带装置11设置在基板27上,第四驱动组件12驱使驱使基板27朝靠近或远离第二清理装置13的方向移动。
62.参照图6,第四驱动组件12包括转动插接在两块立板91之间的多根连接轴121,每根连接轴121的两端均套接固定有第四带轮122,两组第四带轮122上均套接有第三同步带123。其中一块立板91上安装有驱使其中一根连接轴121转动的第四电机124,第四电机124的输出轴与对应的连接轴121同轴固定连接。基板27位于立板91的下方,基板27的上表面固定连接有与第三同步带123固定连接的连接块28。第四电机124运转带动连接轴121转动,连接轴121通过第三同步带123带动其他连接轴121转动,同时,基板27与拆带装置11通过连接块28跟随第三同步带123朝靠近或远离第二清理装置13的方向移动。
63.参照图7,每块立板91的下表面均固定连接有第四导向条29,第四导向条29沿支撑条的长度方向延伸设置,第四导向条29的横截面呈工字型设置,立板91的上表面固定连接有两个与第四导向条29截面形状配合的第四滑套30,每个滑套与对应的第四导向条29滑动套接。第四导向条29配合第四滑套30对基板27起导向作用,以使得基板27在滑动过程中更加稳定。
64.参照图7,基板27上竖直转动连接有旋转臂31,拆带装置11设置在旋转臂31上,基板27上设置驱使旋转臂31转动的第六驱动组件32。通过设置旋转臂31,使得拆带装置11能够跟随旋转臂31在水平面转动,提高了拆带装置11的灵活性,有利于提高拆带装置11的切割效率。
65.参照图8,基板27上转动连接有竖直设置的竖杆33,竖杆33穿透基板27。竖杆33的
一端与旋转臂31的上表面固定连接,竖杆33的另一端固定连接有限位块34,限位块34的横截面面积大于竖杆33的横截面面积,限位块34与基板27的上表面抵接。限位块34配合竖杆33对旋转臂31起支撑作用,以使得旋转臂31和拆带装置11能够跟随基板27同步移动。
66.参照图8,第六驱动组件32包括安装在基板27上表面的第五电机321,旋转臂31的上表面与基板27的下表面之间存在间距,竖杆33位于旋转臂31的上表面与基板27的下表面之间的部分套接固定有传动齿轮322,第五电机321的输出轴连接有齿轮箱323,齿轮箱323内设蜗轮蜗杆传动装置,齿轮箱323的输出轴连接有与传动驱动配合的驱动齿轮324。齿轮箱323采用现有的,这里不再赘述。第物电机通过齿轮箱323带动驱动齿轮324转动,从而带动传动齿轮322和旋转臂31转动。
67.参照图9,旋转臂31远离竖杆33的一端连接有竖直转动连接有连接杆35,旋转臂31上设置有驱使连接杆35转动的第七驱动组件36。连接杆35远离旋转臂31的一端连接有用于安装拆带装置11的基台37。
68.参照图7,基台37包括与连接杆35固定连接的底板371,底板371的上表面固定有固定环372,拆带装置11固定在固定环372上。
69.参照图9,旋转臂31中空设置,旋转臂31的中空部分贯通自身的上表面与下表面,以减轻旋转臂31的重量。旋转臂31长度方向的两内侧壁之间固定连接有第一固定板38与第二固定板39,第一固定板38与第二固定板39均水平设置,连接杆35穿透第一固定板38并通过轴承与第一固定板38转动连接。
70.参照图5,第七驱动组件36包括安装在旋转臂31上的第六电机361,第六电机171与连接杆35相对设置。第六电机361的输出轴传动连接有减速箱362,减速箱362内设涡轮蜗杆结构,减速箱362采用现有的,这里不再赘述。减速箱362的输出轴穿透第二固定板39并通过轴承与第二固定板39转动连接,减速箱362的输出轴穿过第二固定板39的一端固定连接有第五带轮363,连接杆35穿过第一固定板38的一端固定连接有第六带轮364,第五带轮363与第六带轮364之间传动套接有第四同步带365。第六电机361运转并通过减速箱363带动第五带轮363、第四同步带365以及第六带轮364转动,从而带动连接杆35转动。
71.参照图7,旋转臂31的下表面还固定连接有托线盘40,以便整理线缆,从而方便旋转臂31旋转。
72.参照图9,切割组件111包括夹板1112和驱使夹板1112沿竖直方向移动的第五驱动件以及切割刀1113,第五驱动件为第三气缸1111,第三气缸1111的缸体固定在固定环372的外环面,第三气缸1111的活塞杆与夹板1112固定连接,切割刀1113固定在第三气缸1111的缸体部分,切割刀1113的刀头朝向夹板1112设置且延伸至超出第三气缸1111的缸体部分。
73.参照图9,夹板1112包括第一夹持部11121和位于第一夹持部11121下方的第二夹持部11122,第一夹持部11121与第二夹持部11122的一端固定连接,第一夹持部11121与第二夹持部11122的另一端之间留有供打包带插入的间隙,第二夹持部11122的横截面面积大于第一夹持部11121的横截面面积。当切割打包带时,第三气缸1111驱使夹板1112下移直至第二夹持部11122与物品表面接触,第七驱动组件36驱使连接杆35转动,从而带动夹板1112转动,从而使得第二夹持部11122从物品表面和打包带之间的空隙穿过,当打包带卡接在第一夹持部11121与第二夹持部11122之间后,第三气缸1111驱使夹板1112朝靠近底板371的方向移动,打包带跟随夹板1112移动的过程中与切割刀1113抵接并被切割刀1113切断。
74.参照图9,夹持组件112包括固定在固定环372压块1121和驱使压块1121沿竖直方向移动的第六驱动件,第六驱动件为第四气缸1122。第四气缸1122与第三气缸1111相对设置,第四气缸1122的缸体固定在固定环372的内环面,第四气缸1122的缸体穿透底板371,第四气缸1122的活塞杆与压块1121固定连接。压块1121与第二夹持部11122超出第一夹持部11121的部分相对设置。当打包带卡接在第一夹持部11121与第二夹持部11122之间后,第四气缸1122驱使压块1121下移,压块1121将打包带压紧在第二夹持部11122上。之后,第三气缸1111的活塞杆、第四气缸1122的活塞杆同步回缩,从而使得打包带不会从第一夹持部11121与第二夹持部11122之间的间隙处滑出,提高了拆带装置11切割打包带的成功率。
75.当打包带被切断后,压块1121继续压紧打包带,第六驱动组件32驱使旋转臂31转动以使得旋转臂31的长度方向与立板91的长度方向一致。第四驱动组件12驱使基板27移动以带动旋转臂31和夹持组件112朝靠近第二清理装置13的方向移动,切割后的打包带在夹持组件112的作用下被运转至第二清理装置13。
76.参照图9,拆带装置11设置有多组,本技术实施例中拆带装置11设置有六组,六组拆带装置11以固定环372的轴线为中心圆周间隔分布在固定环372上。因用于绑扎物品的打包带一般设置有多条,因此,通过增加拆带装置11的数量,能够利用多组拆带装置11将多根打包带依次切割并一次性输送至第二清理机构,以提高物品的拆包效率。
77.本技术实施例一种全自动除膜机的实施原理为:
78.当需将包裹物品的包装膜和绑扎物品的打包带去除时,将需待拆包的物品放置在第一传送带机构2002上,第一传送带机构2002将物品运输至第二传送带机构2003,第二驱动组件7驱使活动架6下移,当活动架6下移至指定位置后,气动吸盘82通气以吸附包装膜。伺服滑台3002运转以驱使热风枪3001朝靠近物品的方向直至热风枪3001的枪口贴近物品表面,热风枪3001工作以加热包装膜,同时,第一驱动组件400驱使热风枪3001沿竖直方向移动,包装膜受热区域融化而出现断口,完成包装膜的切割。
79.第二驱动组件7驱使活动架6上移,机械臂81与气动吸盘82跟随活动架6上移,气动吸盘82拉拽包装膜,同时,第五驱动组件22底板371转动,从而带动第二传送带机构2003转动,以加快包装膜从物品上脱落的速度。当活动架6上移至指定位置后,第一电机83运转以驱使机械臂81朝靠近第一清理装置5的方向移动,同时,第一电机83通过联动组件84带动第二力臂812相对第一力臂811转动。
80.当气动吸盘82转动至正对第一卷筒52与第二卷筒53后,气动吸盘82松开包装膜,打包膜落在第一卷筒52与第二卷筒53之间。第一气缸54驱动第一卷筒52朝靠近第二卷筒53的方向移动,直至第一卷筒52和第二卷筒53将包装膜夹紧。第二电机55运转以驱使第二卷筒53转动,第二卷筒53通过摩擦力带动第一卷筒52朝与自身转动方向相反的方向转动,包装膜在第一卷筒52与第二卷筒53作用下被逐渐抽走,从而使得包装膜从物品上脱落。
81.之后,第五驱动组件22停止运转,以使得物品停止转动。第三驱动组件10驱使支撑架9下移直至夹板1112邻近物品表面,第三气缸1111运转以驱使夹板1112下移直至夹板1112与物品表面接触。第七驱动组件36运转以驱使连接杆35转动,连接杆35转动带动夹板1112转动,直至第二夹持部11122从物品表面和打包带之间的空隙穿过,第四气缸1122驱使压块1121下移,压块1121将打包带压紧在第二夹持部11122上,使得打包带不会从第一夹持部11121与第二夹持部11122之间的间隙处滑出。然后,第三气缸1111的活塞杆、第四气缸
1122的活塞杆同步收缩,打包带跟随夹板1112移动的过程中与切割刀1113抵接并被切割刀1113切断。当打包带被切断后,压块1121继续压紧打包带。
82.接着,第六驱动组件32驱使旋转壁转动以带动多组拆带装置11同步转动,当多组拆带装置11运动至另一条打包带所在位置后,利用另一组拆带装置11并重复上述步骤即可将多条打包带一一切断
83.然后,第六驱动组件32驱使旋转臂31转动以使得旋转臂31的长度方向与立板91的长度方向一致,且将多组拆带装置11调整至靠近收卷机构。第四驱动组件12驱使基板27移动以带动旋转臂31和多组夹持组件112朝靠近第二清理装置13的方向移动,切割后的打包带在夹持组件112的作用下被运转至第二清理装置13。之后,第二清理装置13的运转过程与第一清理装置5的运转过程一致,这里不再赘述。
84.整个设备高度集成化、自动化,占地面积小,能够同时拆除包裹物品的包装膜和绑扎物品的打包带,能够显著提高物品的拆包效率。
85.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1