一种预制板安装机行走装置的制作方法
1.本新型涉及建筑工程技术领域,具体涉及一种预制板安装机行走装置。
背景技术:
2.现有机场道面预制板安装没有专用设备,在进行预制板吊装时通常通过常用的起重机,然而通过起重机吊装预制板存在如下缺陷:
3.1、起重机没有专用轨道,行走时不稳定,影响到预制板的精确铺装;
4.2、没有专门精确控制行走步的控制机构,导致不能随意精确定位于施工位置;
5.3、在预制板的吊装过程中,由于上述原因,导致大型起重机施工成本高,但施工效率低。
技术实现要素:
6.为解决现有技术中存在的问题,本新型提供了一种预制板安装机行走装置。
7.为实现上述目的,本新型的技术方案是:
8.一种预制板安装机行走装置,包括预制板安装机本体、行走装置、及控制机构,所述的预制板安装机本体包括承重桁架以及固定于承重桁架顶端的吊装设备,所述的行走装置设于承重桁架的底端,包括与承重桁架底端连接的驱动机构,以及直线导轨,所述的直线导轨的内外侧端面的下部分别固定连接有第二翼板和第一翼板,所述的驱动机构与第一翼板传动连接,且所述的驱动机构还包括与直线导轨滑动连接的导向槽,所述的控制机构配置为对驱动机构进行控制,并通过导线与驱动机构的控制线路电性连接。
9.优选的,所述的第二翼板和第一翼板的底端面与直线导轨的下端面齐平,并通过地脚螺栓与施工场地的地面固定;在直线导轨的上端面还沿直线导轨的走向设有刻度尺。
10.优选的,所述的控制机构包括人机交互装置及控制电路板,所述的人机交互装置设有移动距离控制模块,所述的移动距离控制模块设有预制板安装机本体初始位置的刻度值输入口,以及当前施工位置的刻度值输入口,所述的控制电路板设有预定程序,该预定程序对预制板安装机本体的行走轨迹及行走距离进行记录,并根据当前施工位置的刻度值控制驱动机构运行、并使预制板安装机本体移动至指定位置。
11.优选的,所述的承重桁架包括2个支撑腿、以及固定连接于2个支撑腿顶端的承重横梁,所述的吊装设备固定安装于承重横梁的顶端。
12.优选的,所述的驱动机构包括与支撑腿的底端固定连接的连接柱,固定连接于连接柱底端的固定块、固定设于固定块底端的导向槽、电机、行走轮,所述的电机的输出轴可转动的贯穿固定块的左右端面,并在远离电机的一端固定连接有行走轮,所述的电机通过连接板与连接柱固定连接,所述的控制机构与电机通过导线电路连接;所述的直线导轨的纵截面为工字形,所述的导向槽设于直线导轨的顶端,并与直线导轨滑动连接,所述的行走轮与第一翼板传动连接。
13.优选的,所述的驱动机构中,电机及行走轮均设有2个。
14.优选的,所述的电机为伺服电机。
15.本新型一种预制板安装机行走装置具有如下有益效果:本新型不但可以通过直线导轨控制预制板安装机本体的行走轨迹,还可通过对驱动机构的精确控制使预制板安装机本体在吊运预制板的过程中保持稳定,通过行走轮直接与直线导轨自带的第一翼板传动连接,通过直线导轨的导向,以及刻度尺的刻度值,以及控制机构的控制,使预制板安装机本体可精确吊运预制板,并通过简单的操作,自动将预制板吊运至施工位置,从而提高了预制板铺装的效率。
附图说明
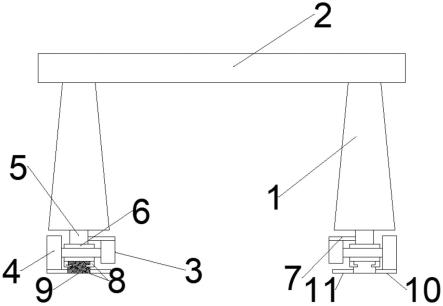
16.图1、本新型正视结构示意图;
17.图2、本新型侧视结构示意图;
18.图3、本新型直线导轨的俯视图;
19.1、支撑腿;2、承重横梁;3、电机;4、行走轮;5、连接柱;6、固定块;7、连接板;8、导向槽;9、直线导轨;10、第一翼板;11、第二翼板;12、地脚螺栓;13、刻度尺。
具体实施方式
20.以下所述,是以阶梯递进的方式对本新型的实施方式详细说明,该说明仅为本新型的较佳实施例而已,并非用于限定本新型的保护范围,凡在本新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本新型的保护范围之内。
21.本新型的描述中,需要说明的是,术语“上”“下”“左”“右”“顶”“底”“内”“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了描述本新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以及特定的方位构造和操作,因此不能理解为对本新型的限制。
22.如图1-3所示:
23.在最初的实施例中,本新型一种预制板安装机行走装置,包括预制板安装机本体、行走装置、及控制机构,所述的预制板安装机本体包括承重桁架以及固定于承重桁架顶端的吊装设备(图中未画出),所述的行走装置设于承重桁架的底端,包括与承重桁架底端连接的驱动机构,以及直线导轨9,参见图3所示,所述的直线导轨9的内外侧端面的下部分别固定连接有第二翼板11和第一翼板10,所述的驱动机构与第一翼板10传动连接,且所述的驱动机构还包括与直线导轨9滑动连接的导向槽8,所述的控制机构配置为对驱动机构进行控制,并通过导线与驱动机构的控制线路电性连接。
24.在进一步的实施例中,如图1所示,所述的第二翼板11和第一翼板10的底端面与直线导轨9的下端面齐平,如图3所示,并通过地脚螺栓12与施工场地的地面固定;在直线导轨9的上端面还沿直线导轨9的走向设有刻度尺13;通过第一翼板和第二翼板可提高直线导轨9的稳定性,通过设置刻度尺13,可在施工时快速定位需要铺装的预制板位置;预制板铺装时,铺装区域位于2条直线导轨9之间;一方面通过直线导轨9和导向槽8,可使预制板安装机本体按制定线路精确移动,使预制板安装方式升级为类似精密结构的生产线的工作形式;另一方面,通过自带的第一翼板10与驱动机构的传动连接,可使预制板安装机本体在轨道上平稳运行,有利于吊装预制板的稳定控制。
25.在进一步的实施例中,所述的控制机构包括人机交互装置(图中未画出)及控制电路板(图中未画出),所述的人机交互装置设有移动距离控制模块(图中未画出),所述的移动距离控制模块设有预制板安装机本体初始位置的刻度值输入口(图中未画出),以及当前施工位置的刻度值输入口(图中未画出),所述的控制电路板设有预定程序,该预定程序对预制板安装机本体的行走轨迹及行走距离进行记录,并根据当前施工位置的刻度值控制驱动机构运行、并使预制板安装机本体移动至指定位置;由于预制板安装机本体的行走轨迹是沿直线导轨来回移动的,且驱动机构的电机转动圈数是可以计数的,因此,只需要知道预制板安装机的初始位置的刻度值,以及电机正向反向转动的圈数,即可计算出预制板安装机的当前位置,同理,根据预制板安装机当前位置的刻度值与当前施工位置的刻度值的差值,可以计算出电机需要转动的圈数,因此,控制电路板可实现精确控制驱动机构运行,使预制板安装机本体在需要吊送预制板时将预制板运输至精确的施工位置。至于预制板安装机的初始位置的确定可参考固定块6前端对应的刻度值。
26.在进一步的实施例中,如图1所示,所述的承重桁架包括2个支撑腿1、以及固定连接于2个支撑腿1顶端的承重横梁2,所述的吊装设备(图中未画出)固定安装于承重横梁2的顶端。
27.在进一步的实施例中,如图1所示,所述的驱动机构包括与支撑腿1的底端固定连接的连接柱5,固定连接于连接柱5底端的固定块6、固定设于固定块6底端的导向槽8、电机3、行走轮4,所述的电机3的输出轴可转动的贯穿(通过轴承)固定块6的左右端面,并在远离电机3的一端固定连接有行走轮4,所述的电机3通过连接板7与连接柱5固定连接,所述的控制机构与电机3通过导线电路连接;所述的直线导轨9的纵截面为工字形,所述的导向槽8设于直线导轨的顶端,并与直线导轨滑动连接,所述的行走轮4与第一翼板10传动连接。
28.在进一步的实施例中,如图2所示,所述的驱动机构中,电机3及行走轮4均设有2个。
29.在进一步的实施例中,所述的电机3为伺服电机。
30.本新型的使用原理:
31.1、本新型具体使用时,工人需要先在移动距离控制模块输入预制板安装机本体初始位置的刻度值,再输入当前施工位置的刻度值,控制电路板即可控制驱动机构将预制板安装机本体驱动至指定位置;再以同样的步骤操作预制板安装机本体运输预制板,即可快速准确的完成预制板铺装。
32.2、上述操作的过程是工人依据刻度尺的具体数值,通过人机交互装置来实现的,操作过程简单,但实施效果精确稳定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1