一种全自动焊锡机用电子元器件多轴取料装置的制作方法
1.本实用新型涉及取料装置,特别涉及一种全自动焊锡机用电子元器件多轴取料装置。
背景技术:
2.电子元器件组装时通常采用焊接方式进行组装,对于贴片时的电子元器件在组装时通常采用smt全自动贴片机贴片,对于非贴片的电子元器件,通常采用全人工焊接或人工供料的半自动焊接方式,此种方式生产效率低。
技术实现要素:
3.针对现有技术的不足,本实用新型的目的是提供一种全自动焊锡机用电子元器件多轴取料装置。
4.本实用新型解决其技术问题所采用的技术方案是:一种全自动焊锡机用电子元器件多轴取料装置,包括机架、设置于所述机架顶部的前后滑轨、与所述前后滑轨配合且前后滑动的前后滑座、设置于所述前后滑座上且左右延伸的横梁、设置于所述横梁上且左右延伸的左右滑轨、与所述左右滑轨配合且沿所述左右滑轨滑动的左右滑座、竖直设置于所述左右滑座上的竖直滑轨、设置于所述竖直滑轨上的夹爪气缸、设置于所述左右滑座上的升降气缸,所述前后滑轨一端设有前后驱动电机,所述前后滑轨两端设有前后带轮,所述前后带轮之间连接有前后传动带,所述前后传动带与所述前后滑座连接,所述前后驱动电机与一个所述前后带轮驱动连接,所述横梁一端设有左右驱动电机,所述横梁两端各设有一个左右带轮,所述左右带轮之间连接有左右传动带,所述左右传动带与所述左右滑座连接,所述左右驱动电机与一个所述左右带轮驱动连接,所述夹爪气缸上设有限位块,所述左右滑座上下两端设有限位座,所述限位座竖直螺纹连接有调整螺栓,所述调整螺栓端部位于所述限位块行程路径上。
5.上述设计中前后滑轨、左右滑轨以及竖直滑轨实现夹爪气缸的三轴运动,便于自动取送料,生产效率高,前后滑座以及左右滑座采用传动带式传动,结构简单,行程长。
6.作为本设计的进一步改进,所述前后滑轨设置于所述机架左右两侧顶部,所述左右滑轨设置于所述横梁顶部。前后滑轨的位置便于抵消横梁的扭力,左右滑轨位置的设置便于承载左右滑座施加的重力。
7.作为本设计的进一步改进,所述前后驱动电机与所述前后带轮的驱动机构和所述左右驱动电机与所述左右带轮的驱动机构相同且均包括主动带轮、从动带轮以及连接所述主动带轮和从动带轮的驱动带,所述主动带轮连接所述左右驱动电机或前后驱动电机,所述从动带轮连接所述左右带轮或前后带轮,传动平稳,左右驱动电机和前后驱动电机布局更加灵活。
8.作为本设计的进一步改进,所述主动带轮、从动带轮、前后带轮以及左右带轮均为齿形带轮,传动精准。
9.作为本设计的进一步改进,所述机架顶部设有容纳所述前后传动带的前后容纳槽,所述横梁设有容纳所述左右传动带的左右容纳槽,有效保护左右传动带和前后传动带。
10.作为本设计的进一步改进,所述左右滑座和所述前后滑座上设有检测片,所述横梁和机架上设有用于检测所述检测片的光电检测传感器。光电检测传感器和检测片便于控制前后滑座和左右滑座的行程。
11.本实用新型的有益效果是:本实用新型中前后滑轨、左右滑轨以及竖直滑轨实现夹爪气缸的三轴运动,便于自动取送料,生产效率高,前后滑座以及左右滑座采用传动带式传动,结构简单,行程长。
附图说明
12.下面结合附图和实施例对本实用新型进一步说明。
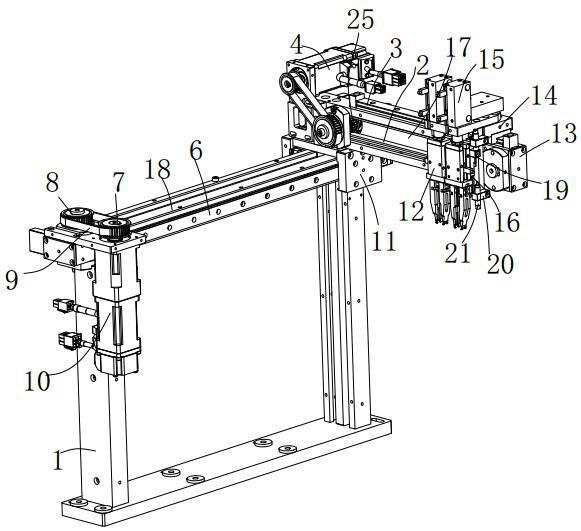
13.图1是本实用新型的前视立体结构示意图。
14.图2是本实用新型的后视立体结构示意图。
15.图3是本实用新型的剖面示意图。
16.在图中1.机架,2.左右传动带,3.左右滑轨,4.左右驱动电机,5.检测片,6.前后滑轨,7.主动带轮,8.从动带轮,9.驱动带,10.前后驱动电机,11.前后滑座,12.夹爪气缸,13.横梁,14.左右滑座,15.升降气缸,16.竖直滑轨,17.左右容纳槽,18.前后容纳槽,19.限位块,20.限位座,21.调整螺栓,22.光电检测传感器,23.前后传动带,24.前后带轮,25.左右带轮。
具体实施方式
17.下面将结合附图以及具体实施例来详细说明本实用新型,其中的示意性实施例以及说明仅用来解释本实用新型,但并不作为对本实用新型的限定。
18.实施例:一种全自动焊锡机用电子元器件多轴取料装置,包括机架1、设置于所述机架1顶部的前后滑轨6、与所述前后滑轨6配合且前后滑动的前后滑座11、设置于所述前后滑座11上且左右延伸的横梁13、设置于所述横梁13上且左右延伸的左右滑轨3、与所述左右滑轨3配合且沿所述左右滑轨3滑动的左右滑座14、竖直设置于所述左右滑座14上的竖直滑轨16、设置于所述竖直滑轨16上的夹爪气缸12、设置于所述左右滑座14上的升降气缸15,所述前后滑轨6一端设有前后驱动电机10,所述前后滑轨6两端设有前后带轮24,所述前后带轮24之间连接有前后传动带23,所述前后传动带23与所述前后滑座11连接,所述前后驱动电机10与一个所述前后带轮24驱动连接,所述横梁13一端设有左右驱动电机4,所述横梁13两端各设有一个左右带轮25,所述左右带轮25之间连接有左右传动带2,所述左右传动带2与所述左右滑座14连接,所述左右驱动电机4与一个所述左右带轮25驱动连接,所述夹爪气缸12上设有限位块19,所述左右滑座14上下两端设有限位座20,所述限位座20竖直螺纹连接有调整螺栓21,所述调整螺栓21端部位于所述限位块19行程路径上。
19.上述设计中前后滑轨6、左右滑轨3以及竖直滑轨16实现夹爪气缸12的三轴运动,便于自动取送料,生产效率高,前后滑座11以及左右滑座14采用传动带式传动,结构简单,行程长。
20.作为本设计的进一步改进,所述前后滑轨6设置于所述机架1左右两侧顶部,所述
左右滑轨3设置于所述横梁13顶部。前后滑轨6的位置便于抵消横梁13的扭力,左右滑轨3位置的设置便于承载左右滑座14施加的重力。
21.作为本设计的进一步改进,所述前后驱动电机10与所述前后带轮24的驱动机构和所述左右驱动电机4与所述左右带轮25的驱动机构相同且均包括主动带轮7、从动带轮8以及连接所述主动带轮7和从动带轮8的驱动带9,所述主动带轮7连接所述左右驱动电机4或前后驱动电机10,所述从动带轮8连接所述左右带轮25或前后带轮24,传动平稳,左右驱动电机4和前后驱动电机10布局更加灵活。
22.作为本设计的进一步改进,所述主动带轮7、从动带轮8、前后带轮24以及左右带轮25均为齿形带轮,传动精准。
23.作为本设计的进一步改进,所述机架1顶部设有容纳所述前后传动带23的前后容纳槽18,所述横梁13设有容纳所述左右传动带2的左右容纳槽17,有效保护左右传动带2和前后传动带23。
24.作为本设计的进一步改进,所述左右滑座14和所述前后滑座11上设有检测片5,所述横梁13和机架1上设有用于检测所述检测片5的光电检测传感器22。光电检测传感器22和检测片5便于控制前后滑座11和左右滑座14的行程。
25.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1