一种智能垃圾桶
1.本实用新型属于垃圾桶技术领域,特别涉及一种智能垃圾桶。
背景技术:
2.垃圾桶在日常生活中是不可或缺的,在日益追求环保的今天,不光需要处理垃圾,还需要针对垃圾的种类性质进行妥善的处理,因此在这种趋势下,设计一款智能垃圾桶十分必要。
技术实现要素:
3.本实用新型的目的是针对现有技术中存在的上述问题,提供了一种智能垃圾桶。
4.本实用新型的目的可通过下列技术方案来实现:一种智能垃圾桶,其特征在于,包括壳体,所述壳体内从上到下设置有第一腔体、第二腔体和第三腔体,所述第一腔体内设置有控制装置、垃圾抓取装置及垃圾压缩装置,所述第二腔体内设置有垃圾分类投放装置,所述第三腔体内设置有多个垃圾存放桶,所述壳体顶部设置有顶盖,所述顶盖上设置有投放口,所述顶盖底部设置有用于对第一腔体内的垃圾进行识别的识别相机,所述垃圾抓取装置用于抓取第一腔体内的垃圾并将垃圾输送至所述垃圾压缩装置,所述垃圾分类投放装置用于将垃圾分类并投放到所述垃圾存放桶内。
5.本实用新型的工作原理:在使用时,人先将垃圾从投放口丢入壳体内,识别相机的摄像头朝下设置,能够识别到第一腔体内的情况,对第一腔体内的垃圾进行识别,确认垃圾的类型和位置并将类型位置信息传输至控制装置内,控制装置便控制垃圾抓取装置移动到垃圾所在位置抓取垃圾,然后控制装置控制垃圾抓取装置将垃圾运送至垃圾压缩装置,控制装置根据识别相机识别到的垃圾信息进行判断,若垃圾属于易拉罐或瓶子等属于可压缩的类别,垃圾压缩装置便会对垃圾进行压缩,压缩完成后垃圾会到达垃圾分类投放装置;若垃圾属于无需压缩的类别,那么垃圾会直接到达垃圾分类投放装置,然后控制装置根据垃圾的信息控制垃圾分类投放装置将垃圾投入相应的垃圾存放桶内。
6.在上述的智能垃圾桶中,所述垃圾抓取装置包括机械手以及用于移动机械手的移动装置,所述移动装置包括滑行光轴组及对称设置于所述第一腔体两侧的滑动光轴,所述的机械手能沿着滑行光轴组的长度方向移动,所述滑行光轴组两端通过连接块与所述滑动光轴连接,所述滑行光轴组能带动机械手沿着滑动光轴的长度方向移动,所述滑行光轴组包括并列设置的两根滑行光轴,所述滑动光轴均设置有第一驱动装置,所述第一驱动装置用于驱动所述滑行光轴组沿所述滑动光轴的长度方向移动,所述连接块上设置有第二驱动装置,所述第二驱动装置用于驱动机械手沿所述滑行光轴组的长度方向移动。
7.在上述的智能垃圾桶中,所述机械手包括与滑行光轴连接的对接部及夹爪,所述对接部设置有第一驱动电机,所述第一驱动电机用于驱动夹爪相对于对接部转动,所述对接部两侧均向下延伸有连接片,所述第一驱动电机位于两个所述连接片之间,所述第一驱动电机通过连接板和夹爪固定连接,所述第一驱动装置的输出轴与一侧连接片固定连接,
所述第一驱动装置与另一侧连接片转动连接,所述夹爪顶部设置有第二驱动电机,所述第二驱动电机用于驱动夹爪旋转。
8.在上述的智能垃圾桶中,所述夹爪包括安装台以及设置在安装台两侧的第一爪片组及第二爪片组,所述安装台设置有第三驱动电机,第三驱动电机用于驱动夹爪开合,所述第一爪片组包括对称设置的两个第一爪片,两个第一爪片之间设置有第一子爪片,所述第一爪片和第一子爪片通过第一连接杆连接,第二爪片组包括对称设置的两个第二爪片,两个第二爪片之间设置有第二子爪片,所述第二爪片和第二子爪片通过第二连接杆连接,两个所述第一爪片分别和两个第二爪片通过齿啮合,所述第三驱动电机用于驱动第二爪片转动,所述第一爪片、第二爪片、第一子爪片及第二子爪片内侧均设置有多个防滑凸起。
9.在上述的智能垃圾桶中,所述第一腔体和第二腔体之间设置有隔板,所述垃圾压缩装置包括设置于隔板上的电动伸缩杆及设置于隔板上的压缩框,所述压缩框一侧设置有开口,所述电动伸缩杆连接有压缩块,所述电动伸缩杆用于驱动所述压缩块从开口伸入压缩框内对垃圾进行压缩,所述压缩框底部设置有连通第二腔体的通孔,所述通孔底部设置有用于开启和关闭所述通孔的开合板。
10.在上述的智能垃圾桶中,所述压缩框包括第一挡板、第二挡板及第三挡板,所述第二挡板及第三挡板高度相同,所述第一挡板高度大于所述第二挡板及第三挡板的高度,所述第一挡板位于所述隔板的边缘一侧,所述隔板底部位于通孔两侧对称设置有两条滑轨,所述开合板能够沿所述滑轨滑动,所述隔板上设置有驱动机构,所述驱动机构用于驱动所述开合板沿所述滑轨滑动,所述驱动机构包括步进电机及同步带,所述隔板底部设置有转轴,所述同步带一端套设于所述转轴上,所述同步带另一端套设于所述步进电机的输出轴上,所述开合板一侧与所述同步带表面固定连接。
11.在上述的智能垃圾桶中,所述垃圾分类投放装置包括第四驱动电机及分类投放桶,所述第四驱动电机用于驱动所述分类投放桶移动,所述分类投放桶底部为可开合设置,所述第四驱动电机设置于所述隔板中心,所述第四驱动电机的输出轴向下延伸有延长杆,所述延长杆一侧设置有两根固定杆。
12.在上述的智能垃圾桶中,所述分类投放桶包括桶体及底板,所述底板与所述桶体分体设置,所述桶体一侧与所述固定杆固定连接,一根所述固定杆上设置有第五驱动电机,所述第五驱动电机用于驱动所述底板旋转,所述第五驱动电机的输出轴固定连接所述底板边缘。
13.在上述的智能垃圾桶中,多个所述垃圾存放桶以所述第四驱动电机的输出轴为中心轴环绕设置。
14.在上述的智能垃圾桶中,所述垃圾存放桶至少设置有四个。
15.与现有技术相比,本实用新型具有智能处理垃圾的优点。
附图说明
16.图1是本实用新型的结构示意图。
17.图2是本实用新型的结构示意图。
18.图3是本实用新型中机械手的结构示意图。
19.图4是本实用新型中机械手的结构示意图。
20.图5是本实用新型的结构示意图。
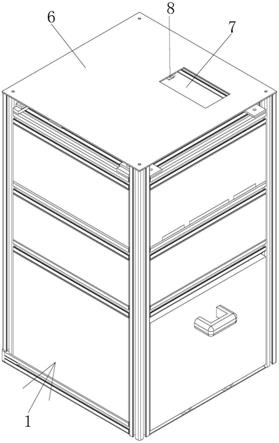
21.图6是本实用新型的结构示意图。
22.图7是本实用新型仰视方向的结构示意图。
23.图8是本实用新型中分类投放桶的结构示意图。
24.图中,1、壳体;2、控制装置;3、垃圾抓取装置;4、垃圾压缩装置;5、垃圾分类投放装置;6、顶盖;7、投放口;8、识别相机;9、机械手;10、移动装置;11、第一腔体;12、第二腔体;13、第三腔体;14、开口;15、滑动光轴;16、滑行光轴组;17、滑行光轴;18、第一驱动装置;19、第二驱动装置;20、连接块;21、对接部;22、夹爪;23、连接片;24、第一驱动电机;25、第二驱动电机;26、第三驱动电机;27、防滑凸起;29、第一爪片组;30、第二爪片组;31、第一爪片;32、第一子爪片;33、第二爪片;34、第二子爪片;35、安装台;36、第一连接杆;37、第二连接杆;38、垃圾存放桶;40、连接板;021、压缩框;022、电动伸缩杆;023、第一挡板;024、第二挡板;025、第三挡板;026、通孔;027、隔板;028、滑轨;029、开合板;030、驱动机构;032、步进电机;033、转轴;034、同步带;035、压缩块;0023、分类投放桶;0024、桶体;0025、底板;0026、固定杆;0027、延长杆;0021、第四驱动电机;0022、第五驱动电机。
具体实施方式
25.以下是本实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
26.如图1
‑
图8所示,本智能垃圾桶包括壳体1,壳体1内从上到下设置有第一腔体11、第二腔体12和第三腔体13,第一腔体11内设置有控制装置2、垃圾抓取装置3及垃圾压缩装置4,第二腔体12内设置有垃圾分类投放装置5,第三腔体13内设置有多个垃圾存放桶38,壳体1顶部设置有顶盖6,顶盖6上设置有投放口7,顶盖6底部设置有用于对第一腔体11内的垃圾进行识别的识别相机8,垃圾抓取装置3用于抓取第一腔体11内的垃圾并将垃圾输送至垃圾压缩装置4,垃圾分类投放装置5用于将垃圾分类并投放到垃圾存放桶38内,控制装置2包括有arduino芯片。
27.进一步细说,垃圾抓取装置3包括机械手9以及用于移动机械手9的移动装置10,移动装置10包括滑行光轴组16及对称设置于第一腔体11两侧的滑动光轴15,的机械手9能沿着滑行光轴组16的长度方向移动,滑行光轴组16两端通过连接块20与滑动光轴15连接,滑行光轴组16能带动机械手9沿着滑动光轴15的长度方向移动,滑行光轴组16包括并列设置的两根滑行光轴17,滑动光轴15均设置有第一驱动装置18,第一驱动装置18用于驱动滑行光轴组16沿滑动光轴15的长度方向移动,连接块20上设置有第二驱动装置19,第二驱动装置19用于驱动机械手9沿滑行光轴组16的长度方向移动,这样便达到了让机械手9能够抓取到第一腔体11内的各个位置的垃圾,方便实用。
28.进一步细说,机械手9包括与滑行光轴17连接的对接部21及夹爪22,对接部21设置有第一驱动电机24,第一驱动电机24用于驱动夹爪22相对于对接部21转动,对接部21两侧均向下延伸有连接片23,第一驱动电机24位于两个连接片23之间,第一驱动电机24通过连接板40和夹爪22固定连接,第一驱动装置18的输出轴与一侧连接片23固定连接,第一驱动装置18与另一侧连接片23转动连接,夹爪22顶部设置有第二驱动电机25,第二驱动电机25用于驱动夹爪22旋转,第一驱动电机24的输出轴固定使得第一驱动电机24在运作时,转动
的部位是第一驱动电机24的机体,从而通过连接片23带动夹爪22转动;第二驱动电机25的输出轴是朝向下的,当第二驱动电机25工作时,夹爪22以第二驱动电机25的输出轴为圆心旋转,方便抓取垃圾。
29.进一步细说,夹爪22包括安装台35以及设置在安装台35两侧的第一爪片组29及第二爪片组30,安装台35设置有第三驱动电机26,第三驱动电机26用于驱动夹爪22开合,第一爪片组29包括对称设置的两个第一爪片31,两个第一爪片31之间设置有第一子爪片32,第一爪片31和第一子爪片32通过第一连接杆36连接,第二爪片组30包括对称设置的两个第二爪片33,两个第二爪片33之间设置有第二子爪片34,第二爪片33和第二子爪片34通过第二连接杆37连接,两个第一爪片31分别和两个第二爪片33通过齿啮合,第三驱动电机26用于驱动第二爪片33转动,第一爪片31、第二爪片33、第一子爪片32及第二子爪片34内侧均设置有多个防滑凸起27,在本实施例中,两个第二爪片33中的一个第二爪片33与第三驱动电机26的输出轴固定连接,第三驱动电机26工作带动一个第二爪片33转动,然后通过第二连接杆37依次传递到第二子爪片34及另一个第二爪片33,这样整个第二爪片33组30便能够转动,再通过齿啮合带动第一爪片31转动,第一爪片31通过第一连接杆36传动使得整个第一爪片组29转动,这样便使得夹爪22能够完成开合从而抓取到垃圾,防滑凸起27的设置增大夹爪22与垃圾之间的摩擦力,抓取更牢固,实用可靠。
30.进一步细说,第一腔体11和第二腔体12之间设置有隔板027,垃圾压缩装置4包括设置于隔板027上的电动伸缩杆022及设置于隔板027上的压缩框021,压缩框021一侧设置有开口14,电动伸缩杆022连接有压缩块035,电动伸缩杆022用于驱动压缩块035从开口14伸入压缩框021内对垃圾进行压缩,压缩框021底部设置有连通第二腔体12的通孔026,通孔026底部设置有用于开启和关闭通孔026的开合板029,在对垃圾压缩完成之后控制装置2控制开合板029将通孔026开启使得垃圾落入第二腔体12内的分类投放桶0023中。
31.进一步细说,压缩框021包括第一挡板023、第二挡板024及第三挡板025,第二挡板024及第三挡板025高度相同,第一挡板023高度大于第二挡板024及第三挡板025的高度,第一挡板023位于隔板027的边缘一侧,第一挡板023的高度较高能够对压缩框021内的垃圾起到限位作用,第二挡板024和第三挡板025高度较低方便机械手9将垃圾投入压缩框021内;隔板027底部位于通孔026两侧对称设置有两条滑轨028,开合板029能够沿滑轨028滑动,隔板027上设置有驱动机构030,驱动机构030用于驱动开合板029沿滑轨028滑动,驱动机构030包括步进电机032及同步带034,隔板027底部设置有转轴033,同步带034一端套设于转轴033上,同步带034另一端套设于步进电机032的输出轴上,开合板029一侧与同步带034表面固定连接,通过设定步进电机032正反转控制同步带034正反向运作从而带动开合板029覆盖通孔026或者离开通孔026。
32.进一步细说,垃圾分类投放装置5包括第四驱动电机0021及分类投放桶0023,第四驱动电机0021用于驱动分类投放桶0023移动,分类投放桶0023底部为可开合设置,第四驱动电机0021设置于隔板027中心,第四驱动电机0021的输出轴向下延伸有延长杆0027,延长杆0027一侧设置有两根固定杆0026,分类投放桶0023包括桶体0024及底板0025,底板0025与桶体0024分体设置,桶体0024一侧与固定杆0026固定连接,一根固定杆0026上设置有第五驱动电机0022,第五驱动电机0022用于驱动底板0025旋转,第五驱动电机0022的输出轴固定连接底板0025边缘,多个垃圾存放桶38以第四驱动电机0021的输出轴为中心轴环绕设
置,第四驱动电机0021采用步进电机032,第四驱动电机0021输出轴工作通过固定杆0026带动分类投放桶0023旋转,而垃圾存放桶38是以第四驱动电机0021的输出轴为中心轴环绕设置的,因此控制装置2控制第四驱动电机0021的旋转便能够控制分类投放桶0023旋转到任意一个垃圾存放桶38上方;第五驱动电机0022工作驱动底板0025旋转能够使得底板0025脱离桶体0024或者与桶体0024拼合,在没有到达对应的垃圾存放桶38上方时,第五驱动电机0022不工作,底板0025与桶体0024是拼合的,垃圾不会从分类投放桶0023中落下,到达对应的垃圾存放桶38上方后,第五驱动电机0022工作旋转底板0025脱离桶体0024,垃圾便会从分类投放桶0023中落入对应的垃圾存放桶38内。
33.进一步细说,垃圾存放桶38至少设置有四个,四个垃圾存放桶38分别对应有害垃圾,可回收物,厨余垃圾及其他垃圾四类。
34.本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
35.尽管本文较多地使用了大量术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本实用新型的本质;把它们解释成任何一种附加的限制都是与本实用新型精神相违背的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1