自动取放料系统及桁架机器人的制作方法
1.本实用新型涉及铸造生产用辅助设备技术领域,具体地说,涉及一种自动取放料系统及桁架机器人。
背景技术:
2.目前,大型的型芯通常使用悬臂吊放入砂箱中,由多人配合操作完成,有人准备物料,安放夹具;有人操作悬臂吊,有人负责向胎具内摆放型芯并取出夹具。上述方式存在以下问题:
3.(1)型芯摆放时受人员熟练程度、精力、体力影响较大,型芯位置误差较大,影响铸造后产品质量;
4.(2)占用人员较多,效率低,人员劳动强度大。
技术实现要素:
5.针对上述不足,本实用新型所要解决的一个技术问题是提供一种桁架机器人,作为同一种构思,本发明所要解决的另一个技术问题是提供一种自动取放料系统,该取放料系统能够实现自动取料放料,工作效率高,作业人员少。
6.为解决上述第一个技术问题,本实用新型的第一个技术方案是:
7.一种桁架机器人,包括:桁架、x向移动机构、y向游动机构、z向升降机构和夹具;
8.所述桁架固定设有x向导轨,x向移动机构包括x向穿梭车,所述x 向穿梭车由x向动力装置驱动沿x向导轨行走;
9.所述y向游动机构包括y向游动车,所述y向游动车通过y向导轨装置滑动于所述x向穿梭车,所述y向导轨装置设于所述x向穿梭车和所述y向游动车之间;
10.所述z向升降机构包括驱动所述夹具沿z向升降的z向动力装置。
11.优选地,所述y向游动车的y向两端分别设有游动限位座,所述游动限位座设有弹性限位装置和固定限位装置;
12.所述弹性限位装置包括滑动于游动限位座的顶销、套设于顶销的弹性件和设于顶销的限位调节螺母,所述限位调节螺母和所述弹性件分别位于所述游动限位座的两侧,所述弹性件位于所述顶销的头部和所述游动限位座之间;
13.所述固定限位装置包括通过两个固定螺母固定于所述游动限位座的限位螺钉,两个所述固定螺母分别位于所述游动限位座的两侧。
14.优选地,所述夹具固定于吊具,所述z向动力装置驱动所述吊具沿z向升降。
15.优选地,所述z向动力装置为固定于所述y向游动车的z向伸缩缸,所述z向伸缩缸的下端固定有安装座,所述安装座与所述吊具固定连接。
16.优选地,所述夹具包括框架,所述框架的上端与所述吊具固定连接,所述框架的下端固定设有基板,所述基板设有夹具物料定位块、t型旋转吊钩和夹具限位销,所述t型旋转吊钩由旋转动力装置驱动。
17.优选地,所述吊具包括吊具本体和可拆卸固定于所述吊具本体下方的连接器;
18.所述吊具本体两端分别固定设有用于勾住所述连接器的l型吊钩,所述l 型吊钩固定设有吊钩定位销,所述吊钩定位销穿过所述连接器,所述连接器和所述吊具本体之间设有间隙。
19.优选地,所述桁架固定设有沿x向设置的齿条;
20.所述x向动力装置包括固定于所述x向穿梭车的电机装置、由所述电机装置驱动驱动的齿轮和转动安装于所述x向穿梭车的滚轮,所述齿轮与所述齿条啮合,所述滚轮沿所述x向导轨滚动。
21.优选地,所述x向穿梭车转动安装有导向轮,所述导向轮沿所述x 向导轨滚动。
22.为解决上述第二个技术问题,本实用新型的第二个技术方案是:
23.一种自动取放料系统,包括:桁架机器人和物料穿梭装置;
24.所述桁架机器人为上述的桁架机器人;
25.所述物料穿梭装置包括底架、固定于所述底架的y向导轨、沿所述y向导轨行走的物料穿梭车、设于所述物料穿梭车的胎具和驱动所述物料穿梭车沿所述y向导轨行走的y向动力装置,所述底架固定设置。
26.优选地,所述胎具包括连接于所述物料穿梭车的底板,所述底板固定有物料支座、物料定位块、夹具支撑块和与所述夹具限位销配合的胎具定位销孔。
27.采用了上述技术方案后,本实用新型的有益效果是:
28.自动取放料系统包括桁架机器人和物料穿梭装置;物料穿梭装置包括底架、固定于底架的y向导轨、沿y向导轨行走的物料穿梭车、设于物料穿梭车的胎具和驱动物料穿梭车沿y向导轨行走的y向动力装置,底架固定设置。周转物料时,物料由物料穿梭车自动搬运到夹具下方,桁架机器人夹取物料并将物料搬运至指定位置,自动完成取料和下料操作,物料放置精确,确保了产品品质稳定可靠,大大提升了生产效率,需要的作业人员少,还降低了劳动强度。
附图说明
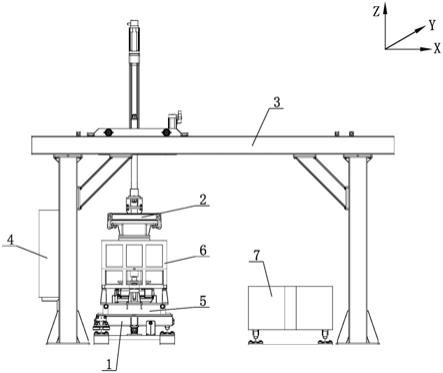
29.图1是本实用新型自动取放料系统的结构示意图;
30.图2是图1中桁架机器人的结构示意图;
31.图3是图2中x向穿梭车的结构示意图;
32.图4是图2中y向游动车的结构示意图;
33.图5是图2中y向游动车另一个方向的结构示意图;
34.图6是图2中z向动力装置的结构示意图;
35.图7是图1中吊具的结构示意图;
36.图8是图1中夹具的结构示意图;
37.图9是图1中物料穿梭装置的结构示意图;
38.图10是图1中胎具的结构示意图;
39.图11是图4中a部的结构示意图;
40.图中:1、物料穿梭装置;10、底架;11、y向导轨;12、物料穿梭车;13、气缸;14、穿梭限位座;2、吊具;21、吊具本体;22、连接器;23、吊钩定位销;24、l型吊钩;3、桁架机器人;31、
桁架;312、x向导轨;313、齿条;314、桁架限位座;32、x向移动机构;321、x向穿梭车;322、滚轮; 323、导向轮;324、伺服电机;325、驱动轴;326、联轴器;327、齿轮;329、 y向槽轨;33、y向游动机构;331、y向游动车;332、滑块;334、导套;335、安全勾;336、安装孔;3331、游动限位座;3332、弹性件;3333、顶销;3334、限位调节螺母;3335、限位螺钉;3336、固定螺母;34、z向升降机构;341、伺服电缸;342、导向柱;343、安装座;4、控制柜;5、胎具;50、底板; 51、物料支座;52、夹具支撑块;53、胎具定位销孔;54、物料定位块;6、夹具;61、夹具限位销;62、框架;63、基板;64、t型旋转吊钩;65、夹具物料定位块。
具体实施方式
41.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,且不用于限定本实用新型。
42.定义xyz坐标系如图1所示。
43.如图1所示,一种自动取放料系统,包括桁架机器人3和物料穿梭装置1。
44.如图9所示,物料穿梭装置1包括底架10、固定于底架10的y向导轨 11、沿y向导轨11行走的物料穿梭车12、设于物料穿梭车12的胎具5和驱动物料穿梭车12沿y向导轨11行走的y向动力装置,y向动力装置优选为气缸13,也可以为油缸、电缸或者其它的直线往复运动机构,底架10固定于地面或者基座上。物料穿梭装置具有放芯工位和取芯工位,当气缸13伸出时对应放芯工位,缩回时对应取芯工位,取芯工位位于桁架机器人的下方与夹具6 位置对应,底架10固定设有穿梭限位座14,当气缸13伸长驱动物料穿梭车 12运动至穿梭限位座14位置时,正好处于取芯工位,以更精确的定位取芯工位。
45.如图10所示,胎具5包括连接于物料穿梭车12的底板50,底板50固定有物料支座51、物料定位块54、夹具支撑块52和与夹具限位销61配合的胎具定位销孔53。
46.如图2所示,桁架机器人3包括:龙门式桁架31、x向移动机构32、y 向游动机构33、z向升降机构34和夹具6,桁架31一侧设有控制柜4。
47.桁架31固定设有x向导轨312,x向移动机构32包括x向穿梭车321,x 向穿梭车由x向动力装置驱动沿x向导轨312行走,桁架31固定设有桁架限位座314,以限制x向穿梭车321的行程。
48.如图3所示,x向动力装置包括固定于x向穿梭车321的电机装置、由电机装置驱动驱动的齿轮327和转动安装于x向穿梭车321的滚轮322,电机装置优选为伺服电机324或者伺服电机324的驱动的减速机,本实施例中优选为伺服电机324驱动的减速机,电机装置驱动驱动轴325旋转,驱动轴325 的两端分别通过联轴器326与齿轮327连接,齿轮327与齿条313啮合,x向的齿条313固定于桁架31,滚轮322沿x向导轨312的上表面滚动。x向穿梭车321转动安装有导向轮323,导向轮323沿x向导轨312的内表面滚动。伺服电机324工作时,通过驱动轴325和联轴器326驱动两侧的齿轮327转动,进而驱动x向穿梭车321沿x向导轨312行走,伺服电机324正反转,实现x向穿梭车321往复行走。
49.如图4和图5共同所示,y向游动机构33包括y向游动车331,y向游动车331通过y向导轨装置滑动于x向穿梭车321,y向导轨装置包括设于x向穿梭车321的y向槽轨329和设于y向游动车331的滑块332,滑块332滑动于y向槽轨329内。
50.y向游动车331底部设有安全勾335,安全勾335勾于x向穿梭车321的下方,安全勾335用于防止y向游动车331被z向升降机构34顶起。
51.y向游动车331的y向两端分别设有游动限位座3331,游动限位座3331 设有弹性限位装置和固定限位装置;
52.如图11所示,弹性限位装置包括滑动于游动限位座3331的顶销3333、套设于顶销3333的弹性件3332和设于顶销的限位调节螺母3334,限位调节螺母3334和弹性件3332分别位于游动限位座3331的两侧,弹性件3332位于游动限位座3331和顶销3333的头部之间,弹性件3332优选为螺旋弹簧;
53.固定限位装置包括通过两个固定螺母3336固定于游动限位座3331的限位螺钉3335,两个固定螺母3336分别位于游动限位座3331的两侧。
54.y向游动车331y向游动时,顶销3333与x向移动机构32的两侧立板内表面弹性接触,防止设备撞坏,限位螺钉3335用于限定y向游动车331的最大游动范围。
55.z向升降机构34包括驱动夹具6沿z向升降的z向动力装置,如图6所示,z向动力装置优选为伺服电缸341,也可以为气缸或者油缸等直线往复运动装置,伺服电缸341固定于y向游动车331,y向游动车331设有供伺服电缸341穿过的安装孔336,伺服电缸341的下端固定有安装座343,安装座343 固定有导向柱342,导向柱342滑动连接于导套334内,导套334设于y向游动车331,安装座343下端固定有吊具2,吊具2的下端固定有夹具6。
56.如图7所示,吊具2包括吊具本体21和可拆卸固定于吊具本体21下方的连接器22,吊具本体21和连接器22间隔有间隙;
57.吊具本体21两端分别固定设有用于勾住连接器的l型吊钩24,l型吊钩 24固定设有吊钩定位销23,吊钩定位销23穿过连接器22。
58.如图8所示,夹具6包括框架62,框架62的上端与吊具2固定连接,框架62的下端固定设有基板63,基板63设有夹具物料定位块65、t型旋转吊钩64和夹具限位销61,t型旋转吊钩64由旋转动力装置驱动旋转,旋转动力装置安装于基板63,如回转气缸或者电机,夹具限位销61为锥形销。
59.以铸造用的砂芯为例,解释说明本实用新型的自动取放料系统的工作原理,如图1所示,桁架31的下部设有下芯工位,下芯工位设有砂箱7,砂箱 7也设有与夹具限位销61适配的砂箱销孔。
60.(1)在放芯工位将砂芯放置于胎具5上,由物料支座51对砂芯定位;
61.(2)气缸13缩回驱动物料穿梭车12沿y向导轨11运动至取芯工位;
62.(3)伺服电缸341伸长驱动夹具6下降,直至夹具6与夹具支撑块52 接触,此时,夹具限位销61插入胎具定位销孔53中,定位夹具6和胎具5 的相对位置,也就定位了夹具6和砂芯的相对位置,t型旋转吊钩64恰好位于砂芯的长型孔内,旋转动力装置驱动t型旋转吊钩64旋转,以使t型旋转吊钩64的勾部能够勾到砂芯;
63.(4)伺服电缸341回缩带动砂芯离开胎具5向上运动至指定高度;
64.(5)伺服电机324工作驱动齿轮327旋转,驱动x向穿梭车321沿x向导轨312行走,将砂芯搬运至下芯工位;
65.(6)伺服电缸341伸长带动砂芯下降至指定的位置,夹具限位销61插入砂箱销孔中,定位夹具6和砂箱的相对位置,也就定位了砂芯和砂箱的相对位置,旋转动力装置驱动t
型旋转吊钩64旋转,伺服电缸341回缩使t型旋转吊钩64,砂芯放置于砂箱7中,完成下芯作业。
66.进行第(6)步时,如果夹具6和砂箱的相对位置不准确,则锥形的夹具限位销61插入砂箱销孔中时,会使y向游动车331沿y向小范围的游动,自动调整夹具6和砂箱的相对位置,使夹具6精确完全落在砂箱上,砂芯位置精确,确保了铸件品质可靠稳定,避免夹具6落不到位,夹具限位销61与砂箱销孔卡死。
67.进行第(3)步时,如果夹具6与夹具支撑块52接触后伺服电缸341继续伸长,由于夹具6和连接器22停止下降,而吊具本体21继续下降,使得吊钩定位销23从连接器22上脱出,此时,如果气缸13回缩,则吊具本体21 和夹具6运动至放芯工位,可更换吊具本体21和夹具6,以吊装不同的砂芯。
68.本技术适用于体积大、重量大的砂芯,下芯时,只需将砂芯放到胎具上,物料穿梭车自动运行到夹具下方,桁架机器人自动完成取芯和下芯操作,大大提升了生产效率,需要的作业人员少,劳动强度低,降低了生产成本,还提高了砂芯在铸造成型下模中的安放位置精确,确保了铸件品质可靠稳定。
69.以上所述为本实用新型最佳实施方式的举例,其中未详细述及的部分均为本领域普通技术人员的公知常识。本实用新型的保护范围以权利要求的内容为准,任何基于本实用新型的技术启示而进行的等效变换,也在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1