一种双无菌袋双全自动封装出料转运ORABS系统的制作方法
一种双无菌袋双全自动封装出料转运orabs系统
技术领域
1.本实用新型涉及一种双无菌袋双全自动封装出料转运orabs系统。
背景技术:
2.本技术人在先申请过一篇公告号为cn102923352a的中国专利公开一种全自动塑料袋封口机,它包括机体,所述的机体上装设有两根相向运动的横梁、每根横梁上均连接设有一组驱动其水平直线往返移动的传动机构,所述两横梁相对的侧面上均固装有一片电热封口夹,所述横梁的上方设有用于撑开并张紧塑料袋的撑杆及驱动撑杆摆动的摆动机构。上述结构,需要人工放袋,并前后夹紧,两侧内撑杆要事先放在无菌袋中,操作不方便只能单单的实现封口功能,功能较为单一,无法实现药物封装流程的自动化,不符合企业的长期发展。
3.进一步的,本技术人申请的公告号为cn112591208a的中国专利公开一种无菌内袋全自动双袋封装orabs系统,包括具有无菌封装腔的机壳,所述无菌封装腔内设有放袋区、内袋封口机以及外袋封口机,所述无菌封装腔内设有将放袋区上的袋子传输进内袋封口机的抓袋转移装置,所述无菌封装腔内设有将内袋封口机封装后的袋子传输进外袋封口机的内袋提升转移装置。其中,其外袋封口机所采用的结构为cn102923352a中所公开的全自动塑料袋封口机的结构,自动化程度不够高,不满足制药、食品等生产制造企业对生产自动化程度越来越高的需求。
技术实现要素:
4.本实用新型的目的是为了克服现有技术存在的缺点和不足,而提供一种双无菌袋双全自动封装出料转运orabs系统。
5.本实用新型所采取的技术方案如下:一种双无菌袋双全自动封装出料转运orabs系统,包括具有无菌封装腔的机壳,所述无菌封装腔内设有内袋放袋区、内袋封口机、用于将内袋放袋区上的袋子传输进内袋封口机的抓袋转移装置、外袋封口机、用于将内袋封口机封装后的物料传输进外袋封口机的物料提升转移装置,其特征在于:所述无菌封装腔内设有外袋放袋区以及用于将外袋放袋区上的袋子传输进外袋封口机的第二组抓袋转移装置。
6.所述外袋封口机包括第一机架、滑动设置在第一机架上的两根第一横梁以及驱动两根横梁之间相向或背向运动的第一传动机构,两根第一横梁相对的侧面上设有电热封口机构,两根第一横梁上安装有用于吸附袋子的真空吸盘组件和用于固定袋口的锁紧机构;所述第一机架上设有两个相向或背向运动的摇臂,两个所述摇臂上均设有夹爪,所述夹爪与第一横梁四者呈十字分布设置且中央形成一个供袋子放置的放置区,所述第一机架上设有配合摇臂用于驱动夹爪朝向放置区移动的预定位件,所述第一机架上设有驱动夹爪朝向放置区往复运动的摇臂驱动件。
7.位于所述夹爪的上方设有随夹爪运动且用于引导袋子进入夹爪内的引导板,所述
夹爪包括爪体、铰接于爪体的第一夹持部与第二夹持部以及驱动第一夹持部或第二夹持部转动的第一推动件,所述第一夹持部与第二夹持部之间设有使两者相向或背向转动的联动组件。
8.所述第一传动机构包括第一被动轮、第二被动轮、套设在第一被动轮和第二被动轮外的传动皮带、设置在传动皮带上带上的上滑动块、设置在传动皮带下带上的下滑动块、用于推动上滑动块或下滑动块的第二推动件,所述上滑动块与传动皮带联动配合,所述下滑动块与传动皮带联动配合,所述上滑动块与下滑动块与两根第一横梁分别连接。
9.所述第一机架上位于放置区的下方设有供袋子放置的第一载料板,所述第一机架上设有用于驱动第一载料板进行抖动的第一抖动驱动件;所述第一载料板上方设有第一推料板,所述述第一机架上设有第一直线滑轨、与第一直线滑轨滑移配合的第一滑块、用于驱动第一滑块沿第一直线滑轨滑移的第一水平直线驱动装置,所述第一推料板与第一滑块相连。
10.所述抓袋转移装置包括抓袋组件和用于驱动抓袋组件的输送机构,所述输送机构包括横向移动组件和竖向移动组件。
11.所述竖向移动组件包括电动升降装置和与电动升降装置相连的气动升降装置,包括控制器,所述控制器与输送机构连接,所述控制器孔控制竖向移动组件使下降行程分为前段的气动升降装置驱动的快速下降阶段和后段的电动升降装置驱动的慢速下降阶段。
12.所述抓袋组件上设有压力感应装置,所述压力感应装置通过感应与袋子或袋盘之间的压力控制电动升降装置驱动的慢速下降阶段停止的位置。
13.所述物料提升转移装置包括物料提升转移底座、物料提升托盘,所述物料提升转移底座与物料提升托盘之间设有物料提升升降驱动组件,所述物料提升升降驱动组件用于输出驱动力使物料提升托盘相对物料提升转移底座上下移动。
14.所述物料提升升降驱动组件为无杆气缸驱动组件。
15.本实用新型的有益效果如下:将内袋放置于内袋放袋区,将外袋放置在外袋放袋区,通过两组抓袋转移装置分别将内袋传输进内袋封口机以及将外袋传输进外袋封口机,在内袋封口机上完成药物的装填与内袋的封口后,通过物料提升转移装置将装有药物的内袋传输进外袋封口机,在外袋封口机上完成外袋的包装与封口后来实现药物整个包装流程的机械封装,进一步提高封装流程的自动化程度,满足市场逐日递增的对自动化程度越来越高的要求,符合企业的长期发展。
附图说明
16.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,根据这些附图获得其他的附图仍属于本实用新型的范畴。
17.图1为本实用新型一种实施例的外部结构示意图;
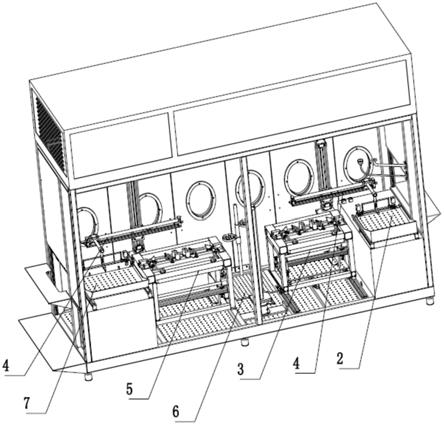
18.图2为本实用新型一种实施例的内部结构示意图;
19.图3为本实用新型一种实施例中外袋封口机的结构示意图;
20.图4为外袋封口机中第一传动机构的结构示意图(a)和真空吸盘组件和锁紧机构
配合的结构示意图(b);
21.图5为外袋封口机中局部结构示意图(a)和夹爪驱动结构示意图(b);
22.图6为外袋封口机中底部载料送料结构的示意图;
23.图7为本实用新型一种实施例中抓袋转移装置的示意图;
24.图8为本实用新型一种实施例中抓袋转移装置的爆炸图;
25.图9为本实用新型一种实施例中内袋封口机的结构示意图;
26.图10为本实用新型一种实施例中内袋封口机的仰视图;
27.图11为本实用新型一种实施例中内袋封口机的局部视图;
28.图12为内袋封口机中直线轨道(a)和滑座(b)的结构示意图;
29.图13为内袋封口机中滑块(a)和配合套(b)的结构示意图;
30.图14为内袋封口机中内袋封口机的爆炸视图;
31.图15为物料提升转移装置的结构示意图;
32.图16为物料提升转移装置的爆炸视图;
33.图17为物料提升转移装置的局部剖视图。
具体实施方式
34.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型作进一步地详细描述。
35.需要说明的是,本实用新型实施例中所有使用“第一”和“第二”的表述均是 为了区分两个相同名称非相同的实体或者非相同的参量,可见“第一”“第二
”ꢀ
仅为了表述的方便,不应理解为对本实用新型实施例的限定,后续实施例对此不再 一一说明。
36.本实用新型所提到的方向和位置用语,例如「上」、「下」、「前」、「后」、「左」、「右」、「内」、「外」、「顶部」、「底部」、「侧面」等,仅是参考附图的方向或位置。因此,使用的方向和位置用语是用以说明及理解本实用新型,而非对本实用新型保护范围的限制。
37.如图1、图2所示,一种双无菌袋双全自动封装出料转运orabs系统,包括具有无菌封装腔的机壳1,所述无菌封装腔内设有内袋放袋区2、内袋封口机3、用于将内袋放袋区2上的袋子传输进内袋封口机3的抓袋转移装置4、外袋封口机5、用于将内袋封口机3封装后的物料传输进外袋封口机5的物料提升转移装置6,所述无菌封装腔内设有外袋放袋区7以及用于将外袋放袋区7上的袋子传输进外袋封口机5的第二组抓袋转移装置4。
38.如图3
‑
6所示,所述外袋封口机5包括第一机架51、滑动设置在第一机架51上的两根第一横梁52以及驱动两根横梁之间相向或背向运动的第一传动机构53,两根第一横梁52相对的侧面上设有电热封口机构,两根第一横梁52上安装有用于吸附袋子的真空吸盘组件54和用于固定袋口的锁紧机构55;所述第一机架51上设有两个相向或背向运动的摇臂56,两个所述摇臂56上均设有夹爪57,所述夹爪57与第一横梁52四者呈十字分布设置且中央形成一个供袋子放置的放置区,所述第一机架51上设有配合摇臂56用于驱动夹爪57朝向放置区移动的预定位件58,所述第一机架51上设有驱动夹爪57朝向放置区往复运动的摇臂驱动件59。其中,真空吸盘组件54和锁紧机构55的结构和背景技术中第二篇专利内的结构相同,不作具体阐述
39.如图5所示,位于所述夹爪57的上方设有随夹爪57运动且用于引导袋子进入夹爪
57内的引导板58,所述夹爪57包括爪体571、铰接于爪体571的第一夹持部572与第二夹持部573以及驱动第一夹持部572或第二夹持部573转动的第一推动件574,所述第一夹持部572与第二夹持部573之间设有使两者相向或背向转动的联动组件。所述的联动组件为第一夹持部572与第二夹持部573外周均设有若干凸齿且相互啮合。第一推动件574采用的为气缸推杆结构。
40.如图4(a)所示,第一传动机构53包括第一被动轮531、第二被动轮532、套设在第一被动轮531和第二被动轮532外的传动皮带533、设置在传动皮带533上带上的上滑动块534、设置在传动皮带533下带上的下滑动块535、用于推动上滑动块534或下滑动块535的第二推动件536,所述上滑动块534与传动皮带533联动配合,所述下滑动块535与传动皮带533联动配合,所述上滑动块534与下滑动块535与两根第一横梁52分别连接。第二推动件536采用的为气缸推杆结构。在本实施例中,第二推动件536外端部连接下滑动块535,当第二推动件536作伸缩动作时,带动下滑动块535水平滑移,进一步通过传动皮带533转动带动上滑动块534水平滑移,从而使上滑动块534、下滑动块535相互靠近或相互远离,进而使两根第一横梁52相互靠近或相互远离。
41.在本实施例中,第一传动机构53中设有相对静止的第三直线滑轨537,所述上滑动块534、下滑动块535均与第三直线滑轨537限位滑移配合。
42.如图6所示,所述第一机架51上位于放置区的下方设有供袋子放置的第一载料板510,所述第一机架51上设有用于驱动第一载料板510进行抖动的第一抖动驱动件5101;所述第一载料板510上方设有第一推料板5102,所述述第一机架51上设有第一直线滑轨5103、与第一直线滑轨5103滑移配合的第一滑块5104、用于驱动第一滑块5104沿第一直线滑轨5103滑移的第一水平直线驱动装置5105,所述第一推料板5102与第一滑块5104相连。所述第一水平直线驱动装置5105具体采用的为无杆气缸驱动机构。
43.如图7
‑
8所示,抓袋转移装置4,包括抓袋组件41和用于驱动抓袋组件41的输送机构,所述输送机构包括横向移动组件42和竖向移动组件,所述竖向移动组件包括电动升降装置43和与电动升降装置43相连的气动升降装置44。气动升降装置44可以实现快速升降驱动,但不易精准控制停止位置,电动升降装置43可以实现精准升降驱动,但移动速度相比较慢,本实施例将两者结合,先快速升降驱动,到接近目标终点位置时再通过电动升降装置精准升降驱动,控制竖向移动组件升降启停位置。
44.包括控制器,所述控制器与输送机构连接,所述控制器控制竖向移动组件使下降行程分为前段的气动升降装置44驱动的快速下降阶段和后段的电动升降装置43驱动的慢速下降阶段。本实施例采用控制器自动化控制,更适用于现代化制造生产的需求。此处的控制器可以为设置在本实施例的抓袋转移装置的本体上,预先设置好升降控制电路或控制程序,也可以集成在双无菌袋双全自动封装出料转运orabs系统的控制系统中。
45.所述抓袋组件41上设有压力感应装置,所述压力感应装置通过感应与袋子或袋盘之间的压力控制电动升降装置43驱动的慢速下降阶段停止的位置。这样,当袋盘上的袋子高度不断减小时,竖向移动组件自动调整抓袋升降高低,无需人为调整。在本实施例中,所述压力检测装置为机械微动开关45。在抓袋组件41下降过程中,当机械微动开关5与袋子接触至一定压力后,机械微动开关45发出电信号,控制器控制竖向移动组件停止下降。
46.本实施例中具体设置为所述电动升降装置43、气动升降装置44、横向移动组件42、
抓袋组件41依次相连,所述电动升降装置43输出驱动力驱动气动升降装置44升降,所述气动升降装置44输出驱动力驱动横向移动组件42升降,所述横向移动组件42输出驱动力驱动抓袋组件41横向移动。
47.所述电动升降装置43包括第一升降台底部431、固定在第一升降台底部431上的第一升降电机432、与第一升降电机432配合的第一电动输出杆433;
48.所述气动升降装置44包括固定连接在第一电动输出杆433外端部的第一升降平台连接板441、固定在第一升降平台连接板441上的升降无杆气缸442、与升降无杆气缸442配合的升降无杆气动滑块443;
49.所述横向移动组件42包括固定连接在升降无杆气动滑块443外端部的第一横向气缸连接板421、固定在第一横向气缸连接板421上的横向无杆气缸422、与横向无杆气缸422配合的横向移动无杆气动滑块423;
50.所述抓袋组件41设置在横向移动无杆气动滑块423外端部。
51.其中,抓袋组件41的结构和背景技术中第二篇专利内的结构相同,不作具体阐述。
52.在本实施例中,所述升降无杆气缸442为磁耦无杆气缸,所述升降无杆气缸442通过磁力带动升降无杆气动滑块443移动。
53.所述横向无杆气缸422为磁耦无杆气缸,所述横向无杆气缸422通过磁力带动横向移动无杆气动滑块423移动。
54.如图9
‑
14所示,本实施例的内袋封口机3,包括第二机架31、设置于第二机架31上的两根第二横梁32以及驱动两根第二横梁32之间相向或背向运动的第二传动机构33。其中,第二传动机构33上的结构与外袋封口机5的第一横梁52上的结构相同,以实现内袋的张开及封口的全自动化操作。其中,第二机架31上的抖料和推料的结构与外袋封口机5上的结构相同。
55.进一步的,如图10所示,所述第二机架31下方设置有用于驱动第二机架31移动的第三传动机构37,所述第三传动机构37包括第二直线滑轨371、设置于第二直线滑轨371上的滑座372、用于驱动滑座372在第二直线滑轨371上沿直线滑移的第二水平直线驱动装置373,所述第二机架31与滑座372相连接。在本实施例中,所述第二水平直线驱动装置373具体采用电动推杆装置,也可以采用气动推杆或液压推杆等采用不同驱动源的结构。
56.进一步的,如图10所示,所述第二直线滑轨371设有两个,两个第二直线滑轨371相平行且分别位于第二机架31的两侧下方,一个第二直线滑轨371上设有两个滑座372,四个滑座372分别与第二机架31下端部的四角相连接;
57.其中两个分别位于两个第二直线滑轨371上的滑座372之间连接有连接杆374,所述第二水平直线驱动装置373与连接杆374相连接。
58.所述第二水平直线驱动装置373与连接杆374的中部相连接。
59.所述第二直线滑轨371上设有两个沿直线设置的长条状限位凸块375,所述滑座372上设有两个与长条状限位凸块375插接配合的限位滑槽376。这样设置确保移动过程中,第二直线滑轨371与滑座372保持连接关系。
60.所述长条状限位凸块375为圆柱状,所述长条状限位凸块375表面为光滑曲面。
61.进一步的,所述滑座372包括长方形的连接板、连接于连接板一侧侧面的4个第二滑块3712,第二滑块3712的结构如图5(a)所示,所述限位滑槽376开口设置在滑块7012远离
连接板的一侧,所述限位滑槽376内设有可拆卸的弹性的配合套377,配合套707的结构如图5(b)所示。
62.所述限位滑槽376内壁上开设有轴向限位凹槽378,所述配合套377外周设有轴向限位块379,通过使所述轴向限位块379位于轴向限位凹槽378中使配合套377相对滑座372轴向位置相对固定;所述轴向限位凹槽378内壁上设有周向限位凹槽3781,所述轴向限位块379外周凸起形成与周向限位凹槽3781配合的周向限位凸块3791,通过使周向限位凸块3791位于周向限位凹槽3781中使配合套377相对滑座372周向不可转动。通过上述结构,实现配合套377的稳定安装。
63.所述第二机架31与滑座372之间通过称重模块34相连接。称重模块34具体采用重力传感器。
64.还包括电磁阀组件38,所述电磁阀组件用于控制内袋封口机上的所有的气缸驱动件,所述第二机架31上设有电磁阀组件安装板39,所述电磁阀组件38固定于电磁阀组件安装板39上。
65.如图15
‑
17所示,本实施例所采用的物料提升转移装置6包括物料提升转移底座61、物料提升托盘62,所述物料提升转移底座61与物料提升托盘62之间设有物料提升升降驱动组件64,所述物料提升升降驱动组件64用于输出驱动力使物料提升托盘62相对物料提升转移底座61上下移动,所述物料提升升降驱动组件64为无杆气缸驱动组件。具体的,在本实施例中,所述升降驱动组件64为机械式无杆气缸驱动组件。
66.所述物料提升转移底座61上设有物料旋转驱动组件63,所述物料提升升降驱动组件64与物料旋转驱动组件63相连,所述物料旋转驱动组件63输出驱动力使物料提升升降驱动组件64相对物料提升转移底座61转动,所述物料提升托盘62与物料提升升降驱动组件64相连接。
67.所述物料旋转驱动组件63包括转动设置于物料提升转移底座61上的物料提升旋转平台631以及驱动物料提升旋转平台631相对物料提升转移底座61转动的第三推动件632。
68.所述第三推动件632为气缸组件,所述气缸组件包括气缸缸体和活塞杆,所述气缸缸体的外端铰接设置,所述活塞杆的外端部与物料提升旋转平台631铰接。具体的,所述气缸缸体的外端铰接连接有气杆铰接座638,气杆铰接座638的底部固定安装,旋转平台631外周凸起形成铰接凸块639,活塞杆的外端部与铰接凸块639外端部铰接,驱动转动时,活塞杆相对气缸缸体作伸缩动作,气缸缸体相对气杆铰接座638转动,活塞杆的外端部与铰接凸块639之间发生转动,推动旋转平台631转动。
69.所述物料提升转移底座61包括可拆卸连接配合的物料提升转移底板611和环形套612,所述物料提升转移底板611和环形套612之间形成安装腔613,所述环形套612内壁的中部凸起形成限位凸环614,所述物料提升旋转平台631向安装腔613内凸起形成转动凸块633,所述转动凸块633与环形套612之间设有第一径向轴承634和第二径向轴承635,所述第一径向轴承634外环的上下两端分别抵接物料提升转移底板611和限位凸环614,所述第二径向轴承635外环的下端抵接限位凸环614且其上端设有垫圈636,所述物料提升旋转平台631底部与垫圈636之间设有轴向轴承637。
70.所述第一径向轴承634和第二径向轴承635为深沟球轴承,所述轴向轴承637为推
力球轴承。
71.本领域普通技术人员可以理解实现上述实施例方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,所述的程序可以存储于一计算机可读取存储介质中,所述的存储介质,如rom/ram、磁盘、光盘等。
72.以上所揭露的仅为本实用新型较佳实施例而已,当然不能以此来限定本实用新型之权利范围,因此依本实用新型权利要求所作的等同变化,仍属本实用新型所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1