一种全自动双向堆垛机的制作方法
1.本实用新型涉及物流转移技术领域,具体涉及一种全自动双向堆垛机。
背景技术:
2.在物流仓储行业内,为了充分利用高度空间,通常将储位位设计成多层空间,采用叉车进行堆放。此种操作方式不但效率低而且无法有效利用空间。通常物流仓储用堆垛机进行物料运输,包括立柱天轨、下导轨工字钢、货叉伸缩机构、升降机构、水平从动行走箱体等,但现有堆垛机装置使用相对机械化,无法应对复杂结构的物流仓库。所以,现有堆垛机存在不方便灵活使用的问题。
技术实现要素:
3.本实用新型的目的在于提供一种全自动双向堆垛机,以解决现有堆垛机不方便灵活使用的问题。
4.本实用新型解决上述技术问题的技术方案如下:
5.一种全自动双向堆垛机,包括:导轨以及设置在导轨上方的机架;
6.机架上分别设有:与导轨配合的行走机构,设置在行走机构上方的升降机构,与升降机构连接的叉取机构,以及控制系统;
7.行走机构、升降机构和叉取机构分别与控制系统通信连接;
8.叉取机构包括:与升降机构连接的支撑板以及分别设置在支撑板上的旋转组件和伸缩组件,旋转组件和伸缩组件分别与控制系统通信连接。
9.本实用新型的机架可通过行走机构沿导轨进行移动,升降机构可沿机架进行升降,从而带动叉取机构进行升高或者降低,叉取机构再通过旋转组件和伸缩组件相配合,对旋转角度和伸缩长度进行调整,从而对复杂仓库的不同位置的物料进行灵活叉取。
10.进一步地,上述旋转组件包括设置在支撑板下方的旋转电机、以及设置在支撑板上方的旋转盘,旋转电机与控制系统通信连接,旋转盘与旋转电机的输出轴连接,伸缩组件位于旋转盘的上方。
11.本实用新型的旋转电机旋转时,其输出轴可带动旋转盘进行转动,从而使旋转盘上方的伸缩组件同时转动,从而进行角度调节。
12.进一步地,上述伸缩组件包括:设置在旋转盘上的电动缸以及与电动缸连接的叉取盘,电动缸与控制系统通信连接。
13.本实用新型的伸缩组件以电动缸作为动力源件,带动叉取盘移动至物料下方,再将物料叉取提升,从而方便对不同距离的物料进行叉取。
14.进一步地,上述行走机构包括:与机架连接的滚轮以及驱动滚轮转动的行走电机,滚轮与导轨接触,行走电机与控制系统通信连接。
15.本实用新型通过行走电机驱动滚轮转动,从而带动机架沿导轨进行移动
16.进一步地,上述升降机构包括:滑动设置在机架上的升降滑板以及驱动升降滑板
运动的升降电机,升降滑板与支撑板连接,升降电机与控制系统通信连接。
17.本实用新型的升降电机通过同步带牵引升降滑板沿机架进行上下移动,升降滑板同时带动支撑板移动,从而对叉取组件进行高度调整。
18.进一步地,上述机架上开设有与升降滑板相对应的滑槽,滑槽口部设置有挡板。
19.本实用新型通过在机架上设置滑槽,可对升降滑板进行移动导向,并设置有挡板,避免升降滑板从滑槽中轻易滑出。
20.进一步地,上述机架上设置有把手。
21.本实用新型通过设置把手方便在工作人员手动移动堆垛机。
22.进一步地,上述导轨的端部分别设有限位座。
23.本实用新型通过设置限位座用于对机架进行限位,避免机架从导轨端部滑出。
24.本实用新型具有以下有益效果:
25.本实用新型的机架可通过行走机构沿导轨进行移动,升降机构可沿机架进行升降,从而带动叉取机构进行升高或者降低,叉取机构再通过旋转组件和伸缩组件相配合,对旋转角度和伸缩长度进行调整,从而对复杂仓库的不同位置的物料进行灵活叉取。
附图说明
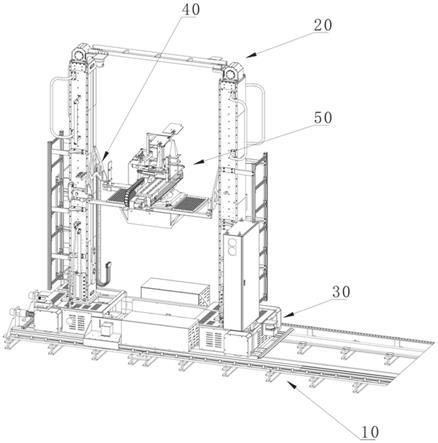
26.图1为本实用新型全自动双向堆垛机的结构示意图;
27.图2为本实用新型全自动双向堆垛机的正视图;
28.图3为本实用新型机架和升降机构的位置示意图;
29.图4为本实用新型升降滑板和升降电机的位置示意图;
30.图5为本实用新型叉取机构的结构示意图。
31.图中:10
‑
导轨;11
‑
限位座;20
‑
机架;21
‑
滑槽;23
‑
把手;30
‑
行走机构;31
‑
滚轮;32
‑
行走电机;40
‑
升降机构;41
‑
升降滑板;42
‑
升降电机;50
‑
叉取机构;51
‑
支撑板;52
‑
旋转组件;53
‑
伸缩组件;54
‑
旋转电机;55
‑
旋转盘;56
‑
电动缸;57
‑
叉取盘。
具体实施方式
32.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
实施例
33.参考图1,一种全自动双向堆垛机,包括:导轨10以及设置在导轨10上方的机架20。
34.导轨10直接铺设在物流仓库的地面,可根据实际需要设定铺设长度,所铺设的导轨10一般呈直线形状,并且具有一定的水平度要求,从而避免机架20在转弯处移动时发生侧翻。并且在导轨10的端部还分别设置有限位座11,限位座11上设有可与机架10接触的弹簧,当机架20移动至端部时,弹簧可与机架20接触,限位座11用于对机架20进行限位,避免机架20从导轨10上滑出。
35.参照图1和图2,机架20为堆垛机的主要框架,机架20上分别设置有:行走机构30、升降机构40、叉取机构50,并且机架20上还设有控制系统。在机架20的顶部两侧分别设置有把手23,从而方便工作人员手动移动堆垛机。
36.行走机构30包括:沿导轨10进行运动的滚轮31以及驱动滚轮31运动的行走电机32,滚轮31分别设置在机架20底部的四周,行走电机32与控制系统通信连接。在行走电机32的驱动下滚轮31可沿导轨10进行滚动,从而带动机架20进行移动。行走电机32的数量为两套,分别分布在机架20的两侧,一套行走电机32分别驱动两个滚轮31。当其中一套行走电机32存在故障时,另一套行走电机32可驱动滚轮31转动,使另一侧的滚轮31能够发生从动转动,从而避免对物料输送产生影响。行走电机32由驱动电机和减速机组成,并且在其外侧套设有保护罩,从而避免对行走电机32产生撞击。
37.参照图1、图3和图4,升降机构40可使叉取机构50沿机架20的立柱进行升降移动,包括:滑动设置在机架20上的升降滑板41以及驱动升降滑板41移动的升降电机42,升降电机42与控制系统通信连接。升降电机42包括驱动电机和减速机,并且在其外侧套设有保护罩。机架20的立柱内侧设置有同步带机构,其底部与升降电机42连接,升降滑板41连接在同步带上,使得同步带运动时升降滑板41随同步带进行上下移动。升降滑板41呈三角形结构,其中一面与叉取机构50连接,另一面与同步带连接。机架20上还开设有滑槽21,升降滑板41与滑槽21接触,从而对升降滑板41的移动进行导向,滑槽21的口部设有挡板避免升降滑板41轻易从滑槽21中滑出。
38.参照图1和5,叉取机构50用于叉取物料,包括:与升降滑板41相连接的支撑板51以及分别设置在支撑板51上的旋转组件52和伸缩组件53,旋转组件52用于调整叉取机构50的叉取角度,从而方便对不同角度的物料进行叉取。伸缩组件53用于调节叉取的伸缩长度,从而对不同距离的物料进行叉取。
39.旋转组件52包括设置在支撑板51下方的旋转电机54以及与旋转电机54输出轴相连接的旋转盘55,旋转电机54与控制系统通信连接,并在旋转电机54的外侧套设有保护罩,旋转盘55位于支撑板51的上方,并且与支撑板51之间存在一定的间隙,从而不会再旋转过程中产生相应的摩擦阻力。伸缩组件53设置在旋转盘55上,可随旋转盘55作相应的角度调整。伸缩组件53包括位于旋转盘55上的电动缸56以及与电动缸56连接的叉取盘57,电动缸56还与控制系统通信连接,电动缸56可根据控制系统的电信号调整伸缩长度,并带动叉取盘57移动至需要被叉取的物料下方,从而对不同距离的物料进行叉取。
40.控制系统以stm32系列的单片机为核心元件,或者以q系列的plc为核心元件,用于写入整体装置的智能控制程序,分别与各机构以及各组件通信连接,从而实现智能联动控制,达到自动转运物料的要求。
41.本实用新型的操作过程:(1)机架20通过行走机构30沿导轨10移动至合适位置;(2)升降机构40进行上下移动,并带动叉取机构50至合适高度;(3)旋转组件52旋转至合适角度,伸缩组件53伸出至所叉取物料下方;(4)升降机构40带动叉取机构50向上移动,从而举升物料;(5)伸缩组件53带动物料缩回,旋转组件52进行角度调整;(6)机架20通过行走机构30沿导轨10移动至另一位置放置物料。
42.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1