一种反转位移机构的制作方法
1.本实用新型涉及自动化设备技术领域,具体涉及一种反转位移机构。
背景技术:
2.现有产线采用的自动化设备实现上下料作业的方案已经成熟,各式各样的移料送料设备屡见不鲜,其中传送带应用最为广泛,而在部分上下料的工序中,产品需要从一只传送带转运到另一只传送带上,这就需要采用机械臂夹取物料并且转移,其中设计到夹取气缸、升降气缸和旋转电机或旋转气缸协同动作,对于机械传动要求更加严格了,并且增加设备的制造成本,最为麻烦的是,若是从一只传送带转移到另一只传送带上,还还需要旋转一定角度摆放时,特别是旋转180度放料,这就需要在升降气缸和夹取气缸之间再设计一只可控旋转角度的旋转气缸,这对于整体结构的稳定性带来不便,并且对于自动化控制、调试稳定性、以及故障维护带来诸多困难,因此,我们有必要设计一种结构简单、传动效率高、自动化控制少、旋转摆放准确的自动移料设备,以帮助产线上两只传送带之间物料的转运。
技术实现要素:
3.本实用新型目的:鉴于背景技术中的技术要求,我们设计一种反转位移机构,能够仅利用单一的伸缩气缸和传动电机完成夹取、升降、旋转和转移多个动作,自动化程度高,节省多个传动单元,控制程序简洁、维修便利、传动效率高、旋转角度动作准确,节约设备制造成本,实用方便。
4.为解决上述问题采取的技术方案是:
5.一种反转位移机构,包括固定在支撑架下端面的传动电机、齿轮传动组件、转移连杆组件和伸缩夹取组件。
6.所述传动电机的主轴与齿轮传动组件配合,所述齿轮传动组件包括主动齿轮、从动齿轮和定位轴,所述主动齿轮与传动电机的主轴固连,所述从动齿轮与主动齿轮啮合传动,所述从动齿轮与定位轴轴孔套设,所述定位轴竖直固定在支撑架上,所述从动齿轮与定位轴之间还设置有轴承,所述从动齿轮与转移连杆组件固连,
7.所述转移连杆组件包括旋转臂、主动短连杆、长连杆、从动短连杆以及旋转轴,所述旋转臂两端设置有套筒,一端套筒套设在定位轴上,并与从动齿轮上端固连,所述主动短连杆与定位轴上端固连,所述长连杆一端与主动短连杆活动连接,另一端与从动短连杆活动连接,所述从动短连杆与旋转轴上端固连,所述旋转轴与旋转臂另一端的套筒轴孔活动配合,所述旋转轴下端固连伸缩夹取组件,
8.所述伸缩夹取组件包括伸缩气缸、夹持座、第一拉拽滑杆、第二拉拽滑杆和左右对称布置的夹爪,
9.所述夹持座固定在伸缩气缸的缸体下端,所述第一拉拽滑杆和第二拉拽滑杆与伸缩气缸的伸缩杆固连,且上下平行布置,所述夹爪上部开设有两个滑移孔,并分别与第一拉拽滑杆和第二拉拽滑杆两侧套设滑动配合,所述夹爪上端垂直于滑移孔方向还前后凸出设
置有滑移轴,所述滑移轴与夹持座前后端面开设的夹取轨道相切配合,所述夹取轨道上半段竖直向下,下半段向内部中心线弯曲收拢,使得夹爪的滑移轴在夹取轨道的带动下实现向下夹取、向上释放的动作控制。
10.进一步地,所述套筒与定位轴之间亦设置有轴承,所述套筒与旋转轴之间亦设置有轴承。
11.进一步地,所述夹爪下端内侧还设置有橡胶垫片,用于夹持传送带上物料时夹取稳定。
12.进一步地,所述主动短连杆和从动短连杆的长度相同,所述长连杆与旋转臂两端套筒的轴线间距的长度相同,使得旋转臂在旋转90度转移物料时,伸缩夹取组件相对旋转臂再旋转90度,以此实现旋转180度的旋转动作控制。
13.本实用新型的有益效果是:
14.该反转位移机构利用单一的伸缩气缸和传动电机完成夹取、升降、旋转和转移多个动作,自动化程度高,节省多个传动单元,控制程序简洁、维修便利、传动效率高、旋转角度动作准确,节约设备制造成本,实用方便。
附图说明
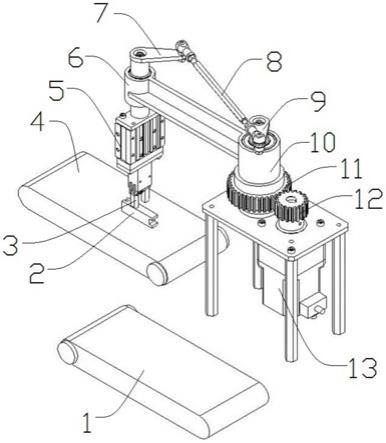
15.图1为本实施例反转位移机构的工作示意图;
16.图2为本实施例反转位移机构的侧俯视图;
17.图3为本实施例所述伸缩夹取组件处于向下夹取动作的结构示意图;
18.图4为本实施例所述伸缩夹取组件处于向上释放动作的结构示意图;
19.其中,1-后一工位传送带,2-物料,3-夹爪,4-前一工位传送带,5-伸缩气缸,6-旋转臂,7-从动短连杆,8-长连杆,9-主动短连杆,10-套筒,11-从动齿轮,12-主动齿轮,13-传动电机,14-夹取座,15-夹取轨道,16-滑移轴,17-垫片,18-第二拉拽滑杆,19-第一拉拽滑杆,20-伸缩杆,21-定位轴,22-旋转轴。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
21.请参阅图1-4,本实施例提出一种反转位移机构,包括固定在支撑架下端面的传动电机13、齿轮传动组件、转移连杆组件和伸缩夹取组件。
22.具体地说,所述传动电机13的主轴与齿轮传动组件配合,所述齿轮传动组件包括主动齿轮12、从动齿轮11和定位轴21,所述主动齿轮12与传动电机13的主轴固连,所述从动齿轮11与主动齿轮12啮合传动,所述从动齿轮11与定位轴21轴孔套设,所述定位轴21竖直固定在支撑架上,所述从动齿轮11与定位轴21之间还设置有轴承,所述从动齿轮11与转移连杆组件固连。
23.参阅图2,所述转移连杆组件包括旋转臂6、主动短连杆9、长连杆8、从动短连杆7以及旋转轴22,所述旋转臂6两端设置有套筒10,一端套筒10套设在定位轴21上,并与从动齿轮11上端固连,所述主动短连杆9与定位轴21上端固连,所述长连杆8一端与主动短连杆9活动连接,另一端与从动短连杆7活动连接,所述从动短连杆7与旋转轴22上端固连,所述旋转
轴22与旋转臂6另一端的套筒10轴孔活动配合,所述旋转轴22下端固连伸缩夹取组件。
24.参阅图3和图4,所述伸缩夹取组件包括伸缩气缸5、夹持座、第一拉拽滑杆19、第二拉拽滑杆18和左右对称布置的夹爪3,所述夹持座固定在伸缩气缸5的缸体下端,所述第一拉拽滑杆19和第二拉拽滑杆18与伸缩气缸5的伸缩杆20固连,且上下平行布置,所述夹爪3上部开设有两个滑移孔,并分别与第一拉拽滑杆19和第二拉拽滑杆18两侧套设滑动配合,所述夹爪3上端垂直于滑移孔方向还前后凸出设置有滑移轴16,所述滑移轴16与夹持座前后端面开设的夹取轨道15相切配合,所述夹取轨道15上半段竖直向下,下半段向内部中心线弯曲收拢,使得夹爪3的滑移轴16在夹取轨道15的带动下实现向下夹取、向上释放的动作控制。
25.进一步的实施方案是,所述套筒10与定位轴之间亦设置有轴承,所述套筒10与旋转轴之间亦设置有轴承。
26.进一步的实施方案是,所述夹爪3下端内侧还设置有橡胶垫片17,用于夹持传送带上物料2时夹取稳定。
27.进一步的实施方案是,所述主动短连杆9和从动短连杆7的长度相同,所述长连杆8与旋转臂6两端套筒10的轴线间距的长度相同,使得旋转臂6在旋转90度转移物料2时,伸缩夹取组件相对旋转臂6再旋转90度,以此实现旋转180度的旋转动作控制。
28.上面结合附图对本实用新型的实施方式作了详细说明,但是本实用新型并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下做出各种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1