一种自动化晾衣架包装出料装置的制作方法
1.本实用新型涉及包装纸箱成型技术领域,特别是涉及一种自动化晾衣架包装出料装置。
背景技术:
2.纸箱因为其重量轻、成本低、易于加工、便于储存和运输的特点,所以成为重要的运输包装容器,而广泛应用,在通过纸箱对晾衣架进行包装过程中,当最后成品纸箱从传送带上下来时需要放到相应的纸箱托盘上,通过人工将纸箱托盘进行搬运的话,由于晾衣架本身具有一定重量,导致纸箱托盘重量更大,人工搬运纸箱托盘一方面效率太低,另一方面工人在长时间工作后体力下降,容易造成安全事故的发生,存在安全隐患,导致企业的生产成本增加。
3.因此,需要一种自动化晾衣架包装出料装置,来代替人工进行纸箱托盘搬运。
技术实现要素:
4.鉴于以上所述现有技术的缺点,本实用新型的目的在于提供一种自动化晾衣架包装出料装置,用于解决现有技术中人工搬运纸箱托盘效率低,成本高的问题。
5.为实现上述目的及其他相关目的,本实用新型提供一种自动化晾衣架包装出料装置,包括纸箱输送线体、托盘输送滚筒线体和码垛机器人,在所述纸箱输送线体输出端两侧对称设有两组出料装置,所述两组出料装置之间设有码垛机器人,所述出料装置包括码垛工位和整垛输送线体,所述托盘输送滚筒线体设于码垛工位一侧且与纸箱输送线体平行设置,所述码垛工位包括码垛支架和整垛输送线体,所述码垛支架设于整垛输送线体下方,所述码垛支架上设有滚筒支架,所述滚筒支架与码垛支架之间设有升降气缸,所述升降气缸活动端连接滚筒支架,所述码垛支架两侧设有导向套,所述滚筒支架底部滑动连接在导向套内,所述码垛支架上还设有滚筒电机。
6.于本实用新型的一实施例中,所述整垛输送线体包括线体支架、线体侧板和多条间隔设置的传送带,所述升降气缸固定端通过气缸安装板设于线体侧板上。
7.于本实用新型的一实施例中,所述传送带水平高度低于托盘输送滚筒线体水平高度,所述线体支架上设有线体电机。
8.于本实用新型的一实施例中,所述两组出料装置沿纸箱输送线体输送方向两侧相对设置。
9.于本实用新型的一实施例中,所述码垛机器人的机械抓手为吸盘式机械抓手。
10.如上所述,本实用新型的一种自动化晾衣架包装出料装置,具有以下有益效果:
11.1、一方面通过升降气缸驱动滚筒支架配合传送带实现对纸箱托盘的输送,可以减少人工操作,避免人工操作带来的安全影响,另一方面,通过利用码垛机器人配合码垛工位工作,当纸箱堆满以后只需要通过叉车将成品纸箱取走即可,解决了传统人工搬运效率低,成本高的问题。
12.2、将码垛工位对称设置在纸箱输送线体两侧可以实现一边码垛工位上堆满纸箱后,利用另一边码垛工位进行堆箱的不停机工作,提高生产效率。
附图说明
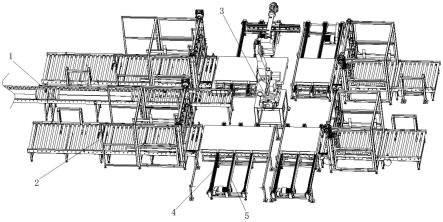
13.图1显示为本实用新型实施例中公开的一种自动化晾衣架包装出料装置的结构示意图。
14.图2显示为图1俯视结构示意图。
15.图3显示为本实用新型实施例中公开的一种自动化晾衣架包装出料装置的码垛工位结构示意图。
16.图4显示为本实用新型实施例中公开的一种自动化晾衣架包装出料装置的码垛工位侧视结构示意图。
17.图5显示为本实用新型实施例中公开的一种自动化晾衣架包装出料装置的码垛工位俯视结构示意图。
18.元件标号说明
19.1-纸箱输送线体;2-托盘输送滚筒线体;3-码垛机器人;4-码垛工位;5-整垛输送线体;401-码垛支架;402-滚筒支架;403-升降气缸;404-导向套;405-滚筒电机;501线体支架;502-线体侧板;503-传送带;504-线体电机。
具体实施方式
20.以下由特定的具体实施例说明本实用新型的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本实用新型的其他优点及功效。
21.请参阅图1至图5。须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本实用新型可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本实用新型可实施的范畴。
22.请参阅图1至图5,本实用新型提供一种自动化晾衣架包装出料装置,包括纸箱输送线体1、托盘输送滚筒线体2和码垛机器人3,在所述纸箱输送线体1输出端两侧对称设有两组出料装置,两组出料装置之间设有码垛机器人3,出料装置包括码垛工位4和整垛输送线体5,托盘输送滚筒线体2设于码垛工位4一侧且与纸箱输送线体1平行设置,码垛工位4包括码垛支架401,所述码垛支架401设于整垛输送线体5下方,码垛支架401上设有滚筒支架402,滚筒支架402与码垛支架401之间设有升降气缸403,升降气缸403活动端连接滚筒支架402,码垛支架401两侧设有导向套404,滚筒支架402底部滑动连接在导向套404内,码垛支架401上还设有滚筒电机405。
23.整垛输送线体5包括线体支架501、线体侧板502和多条间隔设置的传送带503,升降气缸403固定端通过气缸安装板406固定在线体侧板502上,传送带503水平高度低于托盘
输送滚筒线体2水平高度,所述线体支架501上设有线体电机504,出料装置沿纸箱输送线体1输送方向相对设置有两组,且两组码垛工位4尺寸根据码垛纸箱尺寸需求区别设置,码垛机器人3的机械抓手为吸盘式机械抓手。
24.本实用新型具体实施方式,通过提前根据生产需求,将需要的纸箱托盘放至托盘输送线体2上,通过托盘输送线体2将纸箱托盘送至码垛工位4上,码垛工位4上的升降气缸403将滚筒支架401顶升操作,滚筒支架402沿码垛支架401的导向套404内滑动,进而将滚筒支架401升至与托盘输送线体2同一水平工作面内,滚筒电机405带动滚筒转动,方便纸箱托盘移动至码垛工位4工作面内;
25.然后,码垛机器人3将纸箱输送线体1上输送过来的纸箱进行操作,通过预设程序,码垛机器人3将不同型号纸箱放至不同码垛工位4上,同时通过对码垛机器人3预设码垛数量后,当码垛纸箱数量到一定数量后,停止码垛,然后升降气缸403对滚筒支架401进行降低高度操作,当滚筒支架401下降一定高度后,纸箱托盘将落至整垛输送线体5上,通过传送带503动作,将纸箱托盘移出原工作面,然后人工通过叉车将纸箱托盘叉走;为了方便码垛机器人3对纸箱的抓取,码垛机器人3利用吸盘式机械抓手对纸箱进行抓取可以达到更好的抓取效果。
26.综上所述,本实用新型一方面通过升降气缸驱动滚筒支架配合传送带实现对纸箱托盘的输送,可以减少人工操作,避免人工操作带来的安全影响,另一方面,通过利用码垛机器人配合码垛工位工作,当纸箱堆满以后只需要通过叉车将成品纸箱取走即可,解决了传统人工搬运效率低,成本高的问题,将码垛工位对称设置在纸箱输送线体两侧可以实现一边码垛工位上堆满纸箱后,利用另一边码垛工位进行堆箱的不停机工作,提高生产效率。所以,本实用新型有效克服了现有技术中的种种缺点而具高度产业利用价值。
27.上述实施例仅例示性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1