一种取袋机构的制作方法
1.本实用新型涉及包装袋的抓取结构技术领域,具体涉及一种取袋机构。
背景技术:
2.中药颗粒是中药饮片加工炮制工艺及剂型改革研究的进展,是依据中医药理论和临床应用需要,而对中药材及中药材饮片进行特殊加工的一种便于携带和服用的疗效显著提高的新剂型,中药颗粒剂最初多含药材细粉,工艺多凭经验而定。随着制剂质量要求的提高,制粒新设备的引入,新辅料的发掘和应用,中药颗粒剂的制备无论从提取工艺,成型工艺都有了很大的发展,如挥发油的保存利用了包合技术,精制工艺采用高速离心技术、絮凝澄清技术、超滤技术,制粒工艺运用流化制粒技术,喷雾干燥干粉制粒技术等。
3.在生产车间中,中药颗粒剂都是通过装袋机,对中药颗粒进行封袋包装的过程中,需要使用到抓取包装袋的取袋机构,但是现有的取袋机构结构过于复杂,既要设置竖向的移动机构,又要设置横向的移动机构。
4.申请号为cn202011358447.8的中国专利公开了一种包装袋抓袋机构及撑袋落料系统和撑袋落料方法。该机构包括抓袋驱动气缸、抓袋转动杆、第一转动连杆、第二转动连杆和抓袋机械手;抓袋驱动气缸和抓袋转动杆中部分别与落料滑道相应轴柱相铰接,抓袋驱动气缸输出端与抓袋转动杆相连接;第一转动连杆输入端和第二转动连杆输入端分别与抓袋转动杆首尾两端相铰接。
5.然而在上述的技术方案中,就存在上述的技术问题。
技术实现要素:
6.针对以上问题,本实用新型提供了一种取袋机构,通过设置导向板,在导向板上设置导向槽,通过提升机构与伸缩机构的配合,利用提升机构的动力,通过伸缩机构带动真空抓手进行伸缩,使得真空抓手在竖向与横向上移动,解决现有的取袋机构结构复杂的技术问题。
7.为实现上述目的,本实用新型提供如下技术方案:
8.一种取袋机构,包括用于吸附抓取包装袋的真空抓手沿预设路径进行转移。
9.作为改进,所述真空抓手沿预设路径移动至预设路径的两端部时,所述真空抓手沿水平方向移动伸出。
10.作为改进,所述真空抓手包括若干的真空吸嘴。
11.作为改进,所述真空抓手由提升装置带动沿预设路径进行移动。
12.作为改进,所述提升装置包括导向板、提升机构及伸缩机构;
13.所述导向板竖直设置,该导向板上开设有与所述预设路径一致的导向槽;
14.所述提升机构沿所述导向槽升降设置;
15.所述伸缩机构安装于所述提升机构上,该伸缩机构在所述导向槽的两端时,沿水平方向向外伸出。
16.作为改进,所述导向槽包括竖直设置的竖直导向部及位于竖直导向部两端部的倾斜设置的倾斜导向部。
17.作为改进,所述提升机构包括提升板、导轨滑块副及同步带组;
18.所述提升板沿导向板升降设置;
19.所述导轨滑块副安装于所述导向板的两侧,该导轨滑块副用于对所述提升板进行导向;
20.所述同步带组安装于所述导向板上,该同步带组带动所述提升板进行升降移动。
21.作为改进,所述伸缩机构包括伸缩臂及滑动副;
22.所述伸缩臂安装于所述提升板上,该伸缩臂与所述提升板之间设置有滑动副,该滑动副沿水平方向设置;
23.所述伸缩臂上安装有轴承,该轴承置于所述导向槽内。
24.本实用新型的有益效果在于:
25.(1)本实用新型通过设置导向板,在导向板上设置导向槽,通过提升机构与伸缩机构的配合,利用提升机构的动力,通过伸缩机构带动真空抓手进行伸缩,使得真空抓手在竖向与横向上移动,解决现有的取袋机构结构复杂的技术问题。
26.综上所述,本实用新型具有结构简单、衔接紧凑,抓取效果好等优点,尤其适用于包装袋抓取技术领域。
附图说明
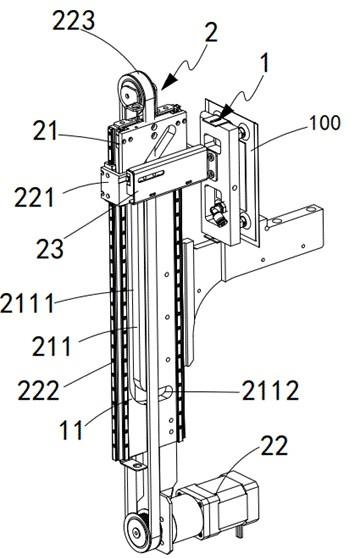
27.图1为本实用新型整体的结构示意图;
28.图2为本实用新型真空抓手的结构示意图;
29.图3为本实用新型伸缩机构的剖视结构示意图。
具体实施方式
30.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
31.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、
ꢀ“
右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、
“ꢀ
顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、
ꢀ“
第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
32.实施例一
33.如图1至图3所示,一种取袋机构,包括用于吸附抓取包装袋100的真空抓手1沿预
设路径10进行转移。
34.其中,所述真空抓手1沿预设路径10移动至预设路径10的两端部时,所述真空抓手1沿水平方向移动伸出。
35.进一步的,所述真空抓手1包括若干的真空吸嘴11。
36.更进一步的,所述真空抓手1由提升装置2带动沿预设路径10进行移动。
37.其中,所述提升装置2包括导向板21、提升机构22及伸缩机构23;
38.所述导向板21竖直设置,该导向板21上开设有与所述预设路径10一致的导向槽211;
39.所述提升机构22沿所述导向槽211升降设置;
40.所述伸缩机构23安装于所述提升机构22上,该伸缩机构23在所述导向槽211的两端时,沿水平方向向外伸出。
41.优选的,所述导向槽211包括竖直设置的竖直导向部2111及位于竖直导向部2111两端部的倾斜设置的倾斜导向部2112。
42.作为优选的,所述提升机构22包括提升板221、导轨滑块副222及同步带组223;
43.所述提升板221沿导向板21升降设置;
44.所述导轨滑块副222安装于所述导向板21的两侧,该导轨滑块副222用于对所述提升板221进行导向;
45.所述同步带组223安装于所述导向板21上,该同步带组223带动所述提升板221进行升降移动。
46.进一步的,所述伸缩机构23包括伸缩臂231及滑动副232;
47.所述伸缩臂231安装于所述提升板221上,该伸缩臂231与所述提升板221之间设置有滑动副232,该滑动副232沿水平方向设置;
48.所述伸缩臂231上安装有轴承233,该轴承233置于所述导向槽211内。
49.需要说明的是,同步带组223启动,带动提升板221沿导向板21进行移动,在提升板221位于竖直导向部2111时,伸缩臂231不沿水平方向向外伸缩,而在提升板221位于倾斜导向部2112时,伸缩臂231才沿水平方向向外伸缩。
50.进一步说明的是,利用倾斜导向部2112的角度变化,利用轴承233的设置使得述伸缩臂231通过滑动副232沿水平方向向前伸展,使得真空抓手1可以进行包装袋100的抓取。
51.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1