一种全自动氦检装置的制作方法
1.本实用新型涉及自动化检测技术领域,特别是一种全自动氦检装置。
背景技术:
2.在许多工业生产中,都需要进行氦检,氦检是对被检产品抽空后充入一定压强的氦气,被检产品外面是具有一定真空度要求的真空空间,真空空间与氦检机漏口相接,若被检工件有漏,则漏入真空空间的氦气可通过氦检机测出。
3.尤其是在空调行业中,整个生产过程中存在大量的搬运、转身、走动等动作浪费,人工搬运蒸发器进、出氦检箱,在氦检箱与蒸发器输送线来回走动,还需手动启动氦检箱检漏,人工搬运上线和下线,生产模式落后,员工劳动强度大,属于生产四高岗位,员工搬运及摆放过程中易造成翅片倒片及集气管变形等质量隐患。
技术实现要素:
4.为了克服现有技术的上述缺点,本实用新型的目的是提供一种利用底板组件放置物料,结合机器人实现物料稳定堆垛,各个部分相互配合,实现全自动化,无人化,降低员工劳动强度,提高生产效率,提升设备自动化水平。
5.本实用新型解决其技术问题所采用的技术方案是:
6.一种全自动氦检装置,包括传输机构,搬运机器人、底板组件和氦检箱,所述传输机构用于传送装载物料的底板组件至氦检箱,所述底板组件设于传输机构上,所述搬运机器人设于传输机构一侧,所述搬运机器人用于抓取并堆叠或拆分底板组件堆垛,所述底板组件用于装载并保护物料,所述传输机构与所述氦检箱连接,所述氦检箱用于检验物料并分析物料的品质。
7.作为本实用新型的进一步改进:所述氦检箱设有舱体和舱门,所述舱门正对氦检箱与传输机构的连接处,所述舱门下方设有滚筒,所述滚筒与传输机构等高设置,所述滚筒连接舱门的两侧。
8.作为本实用新型的进一步改进:所述底板组件设有底板、侧板和支撑杆,所述底板两端设有凹槽,所述侧板底部两侧通过凹槽与底板卡接,所述侧板两侧设有调节槽,所述支撑杆两端通过调节槽与侧板卡接,所述调节槽用于支撑杆上下调节保护物料,所述侧板顶部两侧设有凸台,所述凸台与侧板一体式固定。
9.作为本实用新型的进一步改进:所述传输机构设有横向滚筒链、纵向滚筒链和顶升平移机,若干个所述横向滚筒链并行设置,所述横向滚筒链一侧连接所述纵向滚筒链的一端,所述纵向滚筒链另一端正对舱门与所述氦检箱连接,所述顶升平移机设于横向滚筒链下方,所述顶升平移机运动方向与所述纵向滚筒链同向设置,所述顶升平移机与横向滚筒链连接。
10.作为本实用新型的进一步改进:所述横向滚筒链和纵向滚筒链均设有积放滚筒、变速电机和支架,所述积放滚筒均匀分布在支架上是,所述积放滚筒两端装配有齿轮,所述
变速电机装配在支架的两端,所述齿轮通过套接在齿轮上的链与所述变速电机连接,所述变速电机用于驱动链并带动积放滚筒运动工作。
11.作为本实用新型的进一步改进:所述顶升平移机设有顶升气缸、平移电机、平板链条、支架和底座,所述底座两侧安装有顶升机构,所述两侧顶升机构之间设有传动轴,所述两侧顶升机构通过传动轴连接,所述顶升气缸装配在所述底座一侧,所述顶升气缸还与顶升机构连接,所述顶升气缸用于驱动顶升机构运动并带动支架上升。
12.作为本实用新型的进一步改进:所述支架设于底座上方,所述支架的两侧装配在顶升机构上,所述平移电机安装在支架中部,所述支架设有若干个链轮,所述平板链条与链轮套接,所述平移电机用于驱动链轮并带动平板链条运动。
13.作为本实用新型的进一步改进:所述搬运机器人包括拆垛机器人和码垛机器人,所述拆垛机器人和码垛机器人均设有码垛夹具,所述码垛夹具设有顶架、夹动机构和夹爪,所述夹动机构安装在顶架的两侧,所述夹动机构一侧连接有夹动气缸,所述夹动气缸与顶架连接,所述夹爪固定连接在夹动机构下侧,所述夹爪下端内侧通过螺丝配合连接有卡块。
14.作为本实用新型的进一步改进:所述全自动氦检装置还设有流水线、plc控制器、光电传感器、氦检箱平移机和变频器,所述光电传感器安装在所述传输机构上,所述变频器与变速电机电性连接,所述传输机构还设有阻挡气缸和阻挡器,所述阻挡气缸固定连接在传输机构下方,所述阻挡器设于传输机构中,所述氦检箱平移机设于纵向滚筒链与氦检箱的连接处。
15.一种全自动氦检方法,包括以下步骤:
16.s1、底板组件内放置物料,底板组件随流水线运输到搬运机器人处;
17.s2、搬运机器人对流水线上的底板组件夹取堆垛,堆垛完成后,传输机构将底板组件运输至氦检箱前,氦检箱检测当前状态;
18.s3、传输机构运输底板组件到氦检箱内,氦检箱对物料进行氦检;
19.s4、氦检完成后,等待传输机构运输;
20.s5、传输机构将底板组件运输到搬运机器人处,搬运机器人对底板组件垛堆进行拆垛,拆垛完成后运输出料。
21.作为本实用新型的进一步改进:所述步骤s1中,包括底板组件随流水线运输到码垛机器人处。
22.作为本实用新型的进一步改进:所述步骤s2中,码垛机器人将底板组件依次搬运到横向滚筒链并进行底板组件三层堆垛,横向滚筒链将底板组件物料运输到氦检箱门前。
23.作为本实用新型的进一步改进:所述步骤s2中,氦检箱检测舱体内是否有物料,若是,等待氦检箱出料,进入步骤s5,若否,进入步骤s3。
24.作为本实用新型的进一步改进:所述步骤s3中,顶升平移机将底板组件物料传送到纵向滚筒链,纵向滚筒链将底板组件物料运输进入氦检箱对物料氦检。
25.作为本实用新型的进一步改进:所述步骤s5中,纵向滚筒链将底板组件物料运输到顶升平移机,顶升平移机将底板组件物料移到横向滚筒链,横向滚筒链将底板组件物料运输到拆垛机器人处进行拆垛,拆垛完成,出料处理。
26.与现有技术相比,本实用新型的有益效果是:
27.1.本实用新型利用底板组件放置物料,结合机器人实现物料稳定堆垛,可堆垛三
层,利用滚筒链将三层放置物料的底板平稳运输,利用顶升平移机改变物料运输方向,利用氦检箱内的平移机完成物料的进出,工作时,各个部分相互配合,实现全自动化,无人化,降低员工劳动强度,提高生产效率,提升设备自动化水平。
28.2.本实用新型通过设计蒸发器底板组件,能够很好的保护物料不受损伤,而且能够装载多种物料,适应性强,且物料倾斜角度和高度可调并相应设计机器人夹具,能够将底板进行堆垛和拆垛,可稳定堆垛三层。
29.3.本实用新型通过设计横纵两种滚筒链,可实现运输三层底板自动进出料,同时在横纵交接转向处设计了三组链条顶升平移机,两头中间各一组链条,可和底板组件稳定接触,并移动底板组件,实现转向。
30.4.本实用新型通过设计氦检箱平移机,该装置在氦检真空箱不会引起报警,而且可以实现底板在氦检箱中稳定的进出,整体氦检线体可实现无人化操作,全自动化检测,效率提高2到3倍,并保证了产品的质量,降低了人员劳动强度。
附图说明
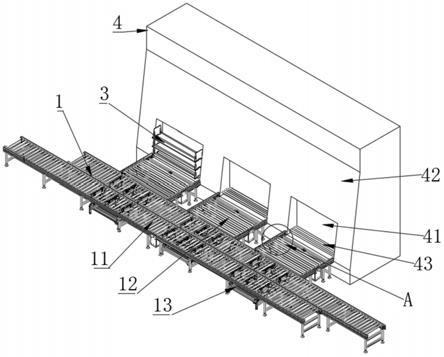
31.图1为本实用新型的结构示意图。
32.图2为本实用新型的三层底板组件堆垛示意图。
33.图3为本实用新型的码垛夹具结构示意图。
34.图4为本实用新型的顶升平移机结构示意图。
35.图5为本实用新型的底板组件结构示意图。
36.图6为本实用新型的a局部示意图
具体实施方式
37.现结合附图说明与实施例对本实用新型进一步说明:
38.本实用新型的详细描述:
39.参考图1至6,一种全自动氦检装置,包括传输机构1,搬运机器人、底板组件3和氦检箱4,所述传输机构1用于传送装载物料的底板组件3至氦检箱4,所述底板组件3设于传输机构1上,所述搬运机器人设于传输机构1一侧,所述搬运机器人用于抓取并堆叠或拆分底板组件3堆垛,所述底板组件3用于装载并保护物料,所述传输机构1与所述氦检箱4连接,所述氦检箱4用于检验物料并分析物料的品质。
40.所述氦检箱4设有舱体42和舱门41,所述舱门41正对氦检箱4与传输机构1的连接处,所述舱门41下方设有滚筒43,所述滚筒43与传输机构1等高设置,所述滚筒43连接舱门41的两侧。
41.所述底板组件3设有底板31、侧板32和支撑杆33,所述底板31两端设有凹槽34,所述侧板32底部两侧通过凹槽34与底板31卡接,所述侧板32两侧设有调节槽35,所述支撑杆33两端通过调节槽35与侧板32卡接,所述调节槽35用于支撑杆33上下调节保护物料,所述侧板32顶部两侧设有凸台36,所述凸台36与侧板32一体式固定。
42.所述传输机构1设有横向滚筒链11、纵向滚筒链12和顶升平移机13,若干个所述横向滚筒链11并行设置,所述横向滚筒链11一侧连接所述纵向滚筒链12的一端,所述纵向滚筒链12另一端正对舱门与所述氦检箱4连接,所述顶升平移机13设于横向滚筒链11下方,所
述顶升平移机13运动方向与所述纵向滚筒链12同向设置,所述顶升平移机13与横向滚筒链11连接,所述横向滚筒链11和纵向滚筒链12均设有积放滚筒121、变速电机122和支架123,所述积放滚筒121均匀分布在支架123上是,所述积放滚筒121两端装配有齿轮124,所述变速电机122装配在支架123的两端,所述齿轮124通过套接在齿轮上的链与所述变速电机122连接,所述变速电机122用于驱动链并带动积放滚筒121运动工作,所述顶升平移机13设有顶升气缸131、平移电机132、平板链条133、支架134和底座135,所述底座135两侧安装有顶升机构137,所述两侧顶升机构137之间设有传动轴136,所述两侧顶升机构137通过传动轴136连接,所述顶升气缸131装配在所述底座135一侧,所述顶升气缸131还与顶升机构137连接,所述顶升气缸131用于驱动顶升机构137运动并带动支架134上升,所述支架134设于底座135上方,所述支架135的两侧装配在顶升机构137上,所述平移电机132安装在支架134中部,所述支架134设有若干个链轮138,所述平板链条133与链轮138套接,所述平移电机132用于驱动链轮138并带动平板链条133运动。
43.所述搬运机器人包括拆垛机器人和码垛机器人,所述拆垛机器人和码垛机器人均设有码垛夹具21,所述码垛夹具21设有顶架211、夹动机构212和夹爪214,所述夹动机构212安装在顶架211的两侧,所述夹动机构212一侧连接有夹动气缸213,所述夹动气缸213与顶架211连接,所述夹爪214固定连接在夹动机构212下侧,所述夹爪214下端内侧通过螺丝配合连接有卡块215。
44.所述全自动氦检装置还设有流水线、plc控制器、光电传感器、氦检箱平移机和变频器,所述光电传感器安装在所述传输机构1上,所述变频器与变速电机电性连接,所述传输机构1还设有阻挡气缸和阻挡器,所述阻挡气缸固定连接在传输机构1下方,所述阻挡器设于传输机构1中,所述氦检箱平移机设于纵向滚筒链12与氦检箱4的连接处。
45.一种全自动氦检方法,包括以下步骤:
46.s1、底板组件3内放置物料,底板组件3随流水线运输到搬运机器人处;
47.s2、搬运机器人对流水线上的底板组件3夹取堆垛,堆垛完成后,传输机构1将底板组件3运输至氦检箱4前,氦检箱4检测当前状态;
48.s3、传输机构1运输底板组件3到氦检箱4内,氦检箱4对物料进行氦检;
49.s4、氦检完成后,等待传输机构1运输;
50.s5、传输机构1将底板组件3运输到搬运机器人处,搬运机器人对底板组件3垛堆进行拆垛,拆垛完成后运输出料。
51.所述步骤s1中,包括底板组件3随流水线运输到码垛机器人处。
52.所述步骤s2中,码垛机器人将底板组件3依次搬运到横向滚筒链11并进行底板组件3三层堆垛,横向滚筒链11将底板组件3物料运输到氦检箱4门前,氦检箱4检测舱体42内是否有物料,若是,等待氦检箱4出料,进入步骤s5,若否,进入步骤s3。
53.所述步骤s3中,顶升平移机13将底板组件3物料传送到纵向滚筒链12,纵向滚筒链12将底板组件3物料运输进入氦检箱4对物料氦检。
54.所述步骤s5中,纵向滚筒链12将底板组件3物料运输到顶升平移机13,顶升平移机13将底板组件3物料移到横向滚筒链11,横向滚筒链11将底板组件3物料运输到拆垛机器人处进行拆垛,拆垛完成,出料处理。
55.本实用新型的实施案例:
56.本实用新型主要由两组横向滚筒链11、纵向滚筒链12、顶升平移机13、堆垛机器人、拆垛机器人、底板组件3和氦检箱4七部分组成,采用plc控制器进行控制,信息交互使用远程i/o,相互通过以太网通讯进行连接。
57.氦检箱4,整体装置的核心装备,负责物料的检验工作,决定物料的品质,氦检箱4工作时,氦检箱4的舱门41将关闭,内部舱体42属于真空状态,充满氮气,检验完毕后,氦检箱4将会给出信号,打开舱门41。
58.底板组件3,主要是装载物料,保护物料在检测运输过程中,表面不受损伤,可调节适应各种物料,同时侧板32顶端和底板21底部分别设计了凸台36和凹槽34,能够很好的进行堆垛,且稳定可靠。
59.拆垛机器人,配备机器人夹具,能够抓取底板组件3,将三层堆垛的底板组件3,拆垛成单个。
60.堆垛机器人,配备机器人夹具,能够抓取底板组件3,将单个底板组件3堆垛成三层。
61.顶升平移机13,由顶升气缸131,平移电机132,支架134和平板链条133组合而成,顶升气缸131将支架134顶起,支架134由平移电机132通过链传动带动平板链条133传动,将三层底板组件3顶起,改变所在轨道,横向滚筒链12和纵向滚筒线13的交接处,物料运输需要改变运输轨道,因此需要顶升平移机13将其平移到其他轨道。
62.纵向滚筒链12,由积放滚筒121,变速电机122,齿轮124和支架123组装,使用链传动,负责氦检箱4前物料的进出,有三组分别对应一个舱门41。待氦检物料通过纵向滚筒链12进入氦检箱4进行检验,检验完成后,纵向滚筒链12将其运输到顶升平移机13上。
63.横向滚同链11,由积放滚筒121,变速电机122,齿轮124和支架123组装,使用链传动,由两条并行横向滚筒链11组成,一条对接堆垛机器人,堆垛完成的物料通过横向滚筒链11运输到对应的纵向滚筒链12前,进行上料,另外一条负责出料,将氦检完成的物料传送到拆垛机器人前,进行拆垛,完成下料。
64.本实用新型控制系统采用plc控制器,配合光电传感器,气缸,变频器和电机进行运动控制,利用以太网通讯,使用远程io对这些设备进行通讯控制,本运动控制系统中只涉及到时序控制,当物料运动到指定位置,传感器检测到信号,将信号传输到plc控制器,plc控制器进行中央处理,输出信号,控制变速气缸、阻挡气缸和电机,从而控制物料的运动导向,plc控制器与两台机器人采取io端口通讯,机器人内部编写程序,运动到指定点位,完成运动,plc控制器只在指定条件下通过io端口通讯调用机器人程序,控制机器人完成规定动作,实际工作时,各部分相互配合,周而复始,完成物料的检验工作。一次检验三个物料,三个氦检箱可同时检验,保证氦检箱时刻都在工作,提高生产效率。
65.底板组件3内放置物料,底板组件3随流水线运输到码垛机器人处,码垛机器人将底板组件3依次搬运到横向滚筒链11并进行底板组件3三层堆垛,横向滚筒链11将底板组件3物料运输到氦检箱4门前,氦检箱4检测舱体42内是否有物料,若是,等待氦检箱4出料,纵向滚筒链12将底板组件3物料运输到顶升平移机13,顶升平移机13将底板组件3物料移到横向滚筒链11,横向滚筒链11将底板组件3物料运输到拆垛机器人处进行拆垛,拆垛完成,出料处理;若否,顶升平移机13将底板组件3物料传送到纵向滚筒链12,纵向滚筒链12将底板组件3物料运输进入氦检箱4对物料氦检,氦检完成后,等待传输机构1运输,纵向滚筒链12
将底板组件3物料运输到顶升平移机13,顶升平移机13将底板组件3物料移到横向滚筒链11,横向滚筒链11将底板组件12物料运输到拆垛机器人处进行拆垛,拆垛完成,出料处理。
66.综上所述,本领域的普通技术人员阅读本实用新型文件后,根据本实用新型的技术方案和技术构思无需创造性脑力劳动而作出其他各种相应的变换方案,均属于本实用新型所保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1