用于软焊料固晶设备的双轨道搬运装置的制作方法
1.本实用新型涉及软焊料固晶设备技术领域,尤其是一种用于软焊料固晶设备的双轨道搬运装置。
背景技术:
2.现有技术中,国内外应用于大功率封装等单排系列框架软焊料固晶设备一般都为单轨道搬运,只能是单排逐颗进行搬运装片。由于此类单排系列框架的自身材质为铜,为了保证产品框架在高温下不发生氧化,要持续不断的向轨道内注入氮氢混合气,导致生产成本较高,影响了生产效率和生产效益。
技术实现要素:
3.本技术针对上述现有生产技术中的缺点,提供一种用于软焊料固晶设备的双轨道搬运装置,能够提升产品框架的输送效率,提高经济效益。
4.本实用新型所采用的技术方案如下:
5.用于软焊料固晶设备的双轨道搬运装置,包括安装底板,所述安装底板上沿长度方向设置若干个固定底座,所述若干个固定底座上竖直设置升降滑轨,升降滑轨上滑动连接升降底座,升降底座一侧连接直线轴承座,直线轴承座通过直线轴承连接x向连杆,x向连杆上设置多个搬运针组件,多个搬运针组件沿着x向连杆长度方向分布;所述安装底板上设置往复升降机构,往复升降机构能够带动升降底座往复升降;所述往复升降机构包括固定在安装底板上的z向伺服电机,z向伺服电机的驱动端通过z向带轮传动组件连接z向连杆,z向连杆上转动连接若干个轴承座,轴承座设置在安装底板上,z向连杆面向升降底座位置处设置升降凸轮,升降凸轮正上方设置能够和升降凸轮滚动接触的升降托轮,升降托轮转动连接在升降底座侧面;所述安装底板上设置平移机构,平移机构能够带动x向连杆沿x轴平移,x向连杆上设置多个搬运针组件,多个搬运针组件沿着x向连杆长度方向分布,多个搬运针组件能够随x向连杆带动实现物料的水平搬运。
6.进一步的,搬运针组件包括可拆卸的连接在x向连杆上的搬运连接块,搬运连接块通过偏心销连接搬运连杆,搬运连杆上设置多个搬运针固定块,多个搬运针固定块上分别设置搬运针,搬运连接块上设置长条形的偏心销安装槽,偏心销安装槽中设置偏心销。
7.进一步的,平移机构包括固定在安装底板上的x向伺服电机,x向伺服电机的驱动端通过x向带轮传动组件连接传动滚珠丝杆组件,滚珠丝杆组件设置在滚珠丝杆安装座上,滚珠丝杆安装座设置在安装底板上,滚珠丝杆组件的螺母座上连接第二随动支架,滚珠丝杆安装座侧面设置x向直线滑轨,x向直线滑轨上分别滑动连接第一随动支架和第二随动支架,第一随动支架上转动连接第一凸轮随动器,第二随动支架上转动连接第二凸轮随动器,第一凸轮随动器和第二凸轮随动器之间设置x向驱动板,x向驱动板通过锁紧块锁紧在x向连杆上,第一随动支架上下端分别设置第一支座,第二随动支架上下端分别设置第二支座,第一支座和第二支座之间设置拉伸弹簧,拉伸弹簧能够带动第一凸轮随动器和第二凸轮随
动器夹持x向驱动板。
8.进一步的,安装底板上设置电机支架,电机支架上水平固定压引线伺服电机,压引线伺服电机驱动端连接压引线传动轴,压引线传动轴上套装多个压引线凸轮,每个压引线凸轮上方设置压引线升降滚轮,压引线升降滚轮转动连接在压引线升降座上,压引线升降座上下滑动连接在压引线固定座上,压引线固定座固设在安装底板上,压引线升降座一侧通过连接件可拆卸的连接压引线组件安装架,压引线组件安装架上通过连接件可拆卸的连接压引线组件。
9.进一步的,压引线组件包括压引线调整架,压引线调整架通过连接件可拆卸的连接压引线连杆一端,压引线连杆另一端通过连接件可拆卸的连接压引线支架,压引线支架上通过连接件可拆卸的连接若干个压引线压块。
10.进一步的,x向连杆上设置手动防卡料组件,手动防卡料组件包括手把,手把下端连接锁紧板,锁紧板套装在x向连杆上,锁紧板一侧连接限位板,限位板前端连接锁紧块,锁紧块套装在x向连杆上,锁紧块一侧设置开口端,开口端连接锁紧螺栓,锁紧螺栓能够将锁紧块锁紧在x向连杆上,限位板上下端分别设置上升降随动滚轮和下升降随动滚轮,上升降随动滚轮转动连接在上升降座上,下升降随动滚轮转动连接在下升降座上,上升降座通过连接件可拆卸的连接下升降座,下升降座上下滑动连接在固定座上,固定座设置在安装底板上,下升降座一侧设置手动随动滚轮,手动随动滚轮下方设置手动升降凸轮,手动升降凸轮套装在z向连杆上。
11.本实用新型的有益效果如下:
12.本实用新型结构紧凑、合理,操作方便,能够提升产品框架的输送效率,提高经济效益;手动防卡料组件能够在卡料的情况下,手动抬起x向连杆上的搬运针组件,解除卡料情况。
附图说明
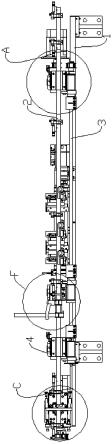
13.图1为本实用新型主视图。
14.图2为图1中a处放大图。
15.图3为图1中c处放大图。
16.图4为图1中f处放大图。
17.图5为本实用新型俯视图。
18.图6为图5中b处放大图。
19.图7为图5中d处放大图。
20.图8为图5中e处放大图。
21.图9为图5中g处放大图。
22.图10为搬运针组件结构图。
23.图11为压引线组件结构图。
24.其中:1、安装底板;2、x向连杆;3、z向连杆;4、固定底座;5、升降底座;6、直线轴承座;7、z向伺服电机;8、z向带轮传动组件;10、升降凸轮;11、升降托轮;12、x向伺服电机;13、x向带轮传动组件;14、滚珠丝杆组件;15、滚珠丝杆安装座;16、x向直线滑轨;17、第一随动支架;18、第二随动支架;19、x向驱动板;20、第一凸轮随动器;21、第二凸轮随动器;22、拉伸
弹簧;23、搬运针;24、搬运针固定块;25、搬运连杆;26、搬运连接块;27、偏心销;28、压引线伺服电机;29、压引线传动轴;30、电机支架;31、压引线凸轮;32、压引线升降滚轮;33、压引线升降座;34、压引线固定座;35、压引线组件安装架;36、压引线调整架;37、压引线连杆;38、压引线支架;39、压引线压块;40、手把;41、锁紧块;42、锁紧螺栓;43、限位板;44、上升降座;45、上升降随动滚轮;46、固定座;47、下升降随动滚轮;48、下升降座;49、手动随动滚轮;50、手动升降凸轮。
具体实施方式
25.下面结合附图,说明本实用新型的具体实施方式。
26.如图1和图5所示的实施例中,用于软焊料固晶设备的双轨道搬运装置主要包括安装底板1,安装底板1上沿长度方向设置若干个固定底座4。
27.如图2和图6所示的实施例中,若干个固定底座4上竖直设置升降滑轨,升降滑轨上滑动连接升降底座5,升降底座5一侧连接直线轴承座6,直线轴承座6通过直线轴承连接x向连杆2,x向连杆2上设置多个搬运针组件,多个搬运针组件沿着x向连杆2长度方向分布。
28.如图10所示的实施例中,搬运针组件包括可拆卸的连接在x向连杆2上的搬运连接块26,搬运连接块26通过偏心销27连接搬运连杆25。搬运连杆25上设置多个搬运针固定块24,多个搬运针固定块24上分别设置搬运针23。搬运连接块26上设置长条形的偏心销安装槽,偏心销安装槽中设置偏心销27。
29.如图1和图5所示的实施例中,安装底板1上设置往复升降机构,往复升降机构能够带动升降底座5往复升降。
30.如图2和图6所示的实施例中,往复升降机构包括固定在安装底板1上的z向伺服电机7,z向伺服电机7的驱动端通过z向带轮传动组件8连接z向连杆3,z向连杆3上转动连接若干个轴承座,轴承座设置在安装底板1上。z向连杆3面向升降底座5位置处设置升降凸轮10,升降凸轮10正上方设置能够和升降凸轮10滚动接触的升降托轮11,升降托轮11转动连接在升降底座5侧面。
31.z向伺服电机7工作时,z向伺服电机7通过z向带轮传动组件8带动z向连杆3转动,z向连杆3又带动升降凸轮10转动,升降凸轮10的滚动端面带动升降托轮11上下往复升降,从而带动升降底座5上下往复升降,最终实现x向连杆2上下往复升降。
32.如图1和图5所示的实施例中,安装底板1上设置平移机构,平移机构能够带动x向连杆2沿x轴平移。x向连杆2上设置多个搬运针组件,多个搬运针组件沿着x向连杆2长度方向分布,多个搬运针组件能够随x向连杆2带动实现物料的水平搬运。
33.如图3和图7所示的实施例中,平移机构包括固定在安装底板1上的x向伺服电机12,x向伺服电机12的驱动端通过x向带轮传动组件13连接传动滚珠丝杆组件14,滚珠丝杆组件14设置在滚珠丝杆安装座15上,滚珠丝杆安装座15设置在安装底板1上。滚珠丝杆组件14的螺母座上连接第二随动支架18。滚珠丝杆安装座15侧面设置x向直线滑轨16,x向直线滑轨16上分别滑动连接第一随动支架17和第二随动支架18,第一随动支架17上转动连接第一凸轮随动器20,第二随动支架18上转动连接第二凸轮随动器21,第一凸轮随动器20和第二凸轮随动器21之间设置x向驱动板19,x向驱动板19通过锁紧块锁紧在x向连杆2上。第一随动支架17上下端分别设置第一支座,第二随动支架18上下端分别设置第二支座,第一支
座和第二支座之间设置拉伸弹簧22,拉伸弹簧22能够带动第一凸轮随动器20和第二凸轮随动器21夹持x向驱动板19。
34.x向伺服电机12工作时,x向伺服电机12通过x向带轮传动组件13带动滚珠丝杆组件14转动,从而带动螺母座上连接的第二随动支架18移动,第二随动支架18通过拉伸弹簧22带动第一随动支架18同步移动,最终实现夹持的x向驱动板19的平移。
35.为了能够压住物料,如图5和图8所示的实施例中,安装底板1上设置电机支架30,电机支架30上水平固定压引线伺服电机28,压引线伺服电机28驱动端连接压引线传动轴29,压引线传动轴29上套装多个压引线凸轮31,每个压引线凸轮31上方设置压引线升降滚轮32,压引线升降滚轮32转动连接在压引线升降座33上,压引线升降座33上下滑动连接在压引线固定座34上,压引线固定座34固设在安装底板1上。压引线升降座33一侧通过连接件可拆卸的连接压引线组件安装架35,压引线组件安装架35上通过连接件可拆卸的连接压引线组件。
36.如图11所示的实施例中,压引线组件包括压引线调整架36,压引线调整架36通过连接件可拆卸的连接压引线连杆37一端,压引线连杆37另一端通过连接件可拆卸的连接压引线支架38,压引线支架38上通过连接件可拆卸的连接若干个压引线压块39。
37.如图1和图5所示的实施例中,x向连杆2上设置手动防卡料组件,手动防卡料组件能够在卡料的情况下,手动抬起x向连杆2上的搬运针组件,解除卡料情况。
38.如图4和图9所示的实施例中,手动防卡料组件包括手把40,手把40下端连接锁紧板,锁紧板套装在x向连杆2上,锁紧板一侧连接限位板43,限位板43前端连接锁紧块41,锁紧块41套装在x向连杆2上,锁紧块41一侧设置开口端,开口端连接锁紧螺栓42,锁紧螺栓42能够将锁紧块41锁紧在x向连杆2上。
39.限位板43上下端分别设置上升降随动滚轮45和下升降随动滚轮47,上升降随动滚轮45转动连接在上升降座44上,下升降随动滚轮47转动连接在下升降座48上,上升降座44通过连接件可拆卸的连接下升降座48,下升降座48上下滑动连接在固定座46上,固定座46设置在安装底板1上。下升降座48一侧设置手动随动滚轮49,手动随动滚轮19下方设置手动升降凸轮50,手动升降凸轮50套装在z向连杆3上。
40.本实用新型的工作原理是:在进行物料搬运的时候,x向伺服电机12通过x向带轮传动组件13驱动滚珠丝杆组件14,带动x向直线导轨上的第二凸轮随动器21平移,第二凸轮随动器21通过拉伸弹簧22带动第一凸轮随动器20共同夹持x向驱动板19平移。x向驱动板19带动x向连杆2上所连接的零件共同平移,实现物料的x向前进动作。z向伺服电机7通过z向带轮传动组件8带动z向连杆3转动,z向连杆3通过升降凸轮10带动升降底座5上下升降运动,从而实现x向连杆2的升降运动,最终能够实现搬运针组件的前进,抬起,返回原点,下降这四个过程往复进行,伺服电机可以精准控制运动距离。在使用中,将锁紧螺栓42松开,推动把手7,能够使x向连杆2上相连的所有搬运针组件同时抬起,压引线伺服电机28工作时,驱动压引线连杆37、压引线凸轮支架38、压引线压块39压住物料。
41.以上描述是对本实用新型的解释,不是对实用新型的限定,本实用新型所限定的范围参见权利要求,在本实用新型的保护范围之内,可以作任何形式的修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1