一种便于快速定位起吊物位置的塔式起重机的制作方法
1.本实用新型属于塔式起重机技术领域,具体涉及一种便于快速定位起吊物位置的塔式起重机。
背景技术:
2.塔式起重机是建筑工地上最常用的一种起重设备,又名塔吊,用来吊起钢筋、木楞、混凝土、钢管等建筑施工用原材料,随着我国建筑业的发展,全国各地大型楼盘纷纷快速兴建,建筑施工对于塔式起重机的依赖性非常高,目前,通过塔式起重机对起吊物进行吊起时,通常采用以下两种方法对起吊物的位置进行定位:第一,依靠塔式起重机司机目测定位起吊物的位置来操作塔式起重机将起吊物吊起,该定位方法受周围施工环境的影响较大,定位精度差;第二,安排一名专门的信号工人,告诉塔式起重机司机起吊物的大致位置,塔式起重机司机根据信号工人传递的信息操作塔式起重机将起吊物吊起,该方法还需要配备专门的信号工人,信号工人和起重机司机之间在传递信息的过程中需要较长的时间,费时费力,施工效率低下。
技术实现要素:
3.本实用新型所要解决的技术问题在于针对上述现有技术中的不足,提供一种便于快速定位起吊物位置的塔式起重机,其结构简单、设计合理,实现塔式起重机施工时起吊物位置的快速定位,定位速度快,且定位精度高,省时省力,有效提高了施工效率,便于推广使用。
4.为解决上述技术问题,本实用新型采用的技术方案是:一种便于快速定位起吊物位置的塔式起重机,所述塔式起重机包括塔身、均设置在塔身上的起重臂和控制室,以及设置在起重臂上的滑动小车和与滑动小车配合的连接器,所述连接器包括箱体、设置在箱体内的动滑轮和设置在箱体底部的吊钩,所述滑动小车上设置有定滑轮,所述定滑轮与动滑轮之间设置有钢丝绳,其特征在于:所述箱体上还设置有用于观测起吊物位置的观测器、用于对所述观测器进行防护的防护器和用于对所述防护器进行清洁的清洁器,以及检测模块和对所述检测模块供电的供电模块;
5.所述观测器包括摄像头和用于调节摄像头安装位置的调节器,所述调节器设置在箱体的底板上,且所述调节器位于箱体外侧;
6.所述检测模块包括设置在箱体内的电子线路板,所述电子线路板上集成有微控制器,所述摄像头的输出端与微控制器的输入端连接,所述微控制器通过无线通信模块与监控终端无线通信;
7.所述供电模块包括蓄电池和与蓄电池连接的微型发电机,所述微型发电机的输入轴与动滑轮的轮轴固定连接,所述蓄电池的输出端连接有降压电路,所述降压电路的输出端与微控制器连接。
8.上述的一种便于快速定位起吊物位置的塔式起重机,其特征在于:所述调节器包
括用于调节摄像头安装高度的高度调节器和用于调节摄像头安装角度的角度调节座;
9.所述高度调节器包括第一伸缩杆,所述第一伸缩杆的外杆设置在箱体的底板上,所述第一伸缩杆由微控制器进行控制;
10.所述角度调节座包括设置在第一伸缩杆的内杆上的上u型座体、与上u型座体配合的下u型座体,以及设置在上u型座体上且用于驱动下u型座体转动的调节座驱动电机,所述调节座驱动电机由微控制器进行控制,所述上u型座体通过销轴与下u型座体铰接,所述下u型座体与销轴固定连接,所述上u型座体与销轴转动配合,所述销轴的一端与调节座驱动电机的输出轴固定连接。
11.上述的一种便于快速定位起吊物位置的塔式起重机,其特征在于:所述防护器包括设置在下u型座体的底板上的旋转驱动电机、均套设在旋转驱动电机的输出轴上的带座轴承和透明保护罩,所述旋转驱动电机由微控制器进行控制,所述摄像头安装在带座轴承上,且所述摄像头位于透明保护罩内。
12.上述的一种便于快速定位起吊物位置的塔式起重机,其特征在于:所述清洁器包括设置在箱体底部的滑动器、设置在所述滑动器上的第二伸缩杆、设置在第二伸缩杆的内杆上的水平连接杆,以及设置在水平连接杆远离第二伸缩杆的端部的弧形清洁器;
13.所述滑动器包括沿箱体的长度方向布设的丝杆、套设在丝杆上且与丝杆滑动配合的滑块、对称设置在丝杆两端的支撑座和固定座,以及用于驱动丝杆转动的丝杆驱动电机,所述第二伸缩杆的外杆与滑块固定连接,所述支撑座和固定座均位于箱体的底面上,所述丝杆驱动电机由微控制器进行控制。
14.上述的一种便于快速定位起吊物位置的塔式起重机,其特征在于:所述弧形清洁器包括与透明保护罩配合的弧形板,以及设置在弧形板内侧面的弧形清洁擦,所述弧形板呈劣弧形。
15.上述的一种便于快速定位起吊物位置的塔式起重机,其特征在于:所述供电模块还包括设置在箱体的顶板上的太阳能板,所述太阳能板的输出端依次通过电池管理模块和充电保护模块与蓄电池的输入端连接。
16.本实用新型与现有技术相比具有以下优点:
17.1、本实用新型通过设置观测器对起吊物的位置进行观测,观测器包括摄像头,通过摄像头对施工现场进行视频采集,塔式起重机司机能够通过摄像头采集到的视频图像对起吊物的位置进行定位,并实时了解吊钩的工作状态和具体位置,便于塔式起重机司机做出正确的判断和操控对起吊物进行吊起,定位速度快,且定位精度高,有效提高了施工效率。
18.2、本实用新型通过设置防护器对摄像头进行防护,避免施工现场的飞石等物体碰撞摄像头造成摄像头损坏,同时,避免施工现场的灰尘附着在摄像头的表面,确保摄像头能够采集到清晰的视频图像,保证摄像头的工作可靠性。
19.3、本实用新型通过设置清洁器对附着在防护器的透明保护罩表面的灰尘进行清理,清理效果好,有效避免因透明保护罩上灰尘堆积过多而影响摄像头的正常工作,保证摄像头的正常工作,进而保证该塔式起重机能够对起吊物的位置进行快速定位。
20.综上所述,本实用新型结构简单、设计合理,通过设置摄像头对施工现场进行视频采集,塔式起重机司机能够通过摄像头采集到的视频图像对起吊物的位置进行定位,并实
时了解吊钩的工作状态和具体位置,便于塔式起重机司机做出正确的判断和操控对起吊物进行吊起,定位速度快,且定位精度高,省时省力,有效提高了施工效率。
21.下面通过附图和实施例,对本实用新型的技术方案做进一步的详细描述。
附图说明
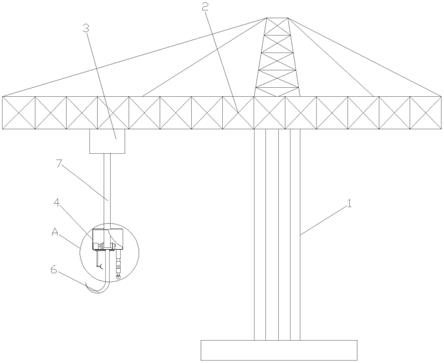
22.图1为本实用新型的结构示意图。
23.图2为图1中的a处局部放大图。
24.图3为本实用新型清洁器与防护器配合时清洁器、防护器和箱体的连接结构示意图。
25.图4为本实用新型调节器、防护器和摄像头的连接结构示意图。
26.图5为本实用新型的电路原理框图。
27.附图标记说明:
28.1—塔身;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2—起重臂;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3—滑动小车;
29.4—箱体;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5—动滑轮;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6—吊钩;
30.7—钢丝绳;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8—摄像头;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
9—微控制器;
31.10—无线通信模块;
ꢀꢀꢀꢀ
11—监控终端;
ꢀꢀꢀꢀꢀꢀꢀꢀ
12—蓄电池;
32.13—微型发电机;
ꢀꢀꢀꢀꢀꢀ
14—降压电路;
ꢀꢀꢀꢀꢀꢀꢀꢀ
15—第一伸缩杆;
33.16—上u型座体;
ꢀꢀꢀꢀꢀꢀꢀ
17—下u型座体;
ꢀꢀꢀꢀꢀꢀꢀ
18—调节座驱动电机;
34.19—销轴;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20—旋转驱动电机;
ꢀꢀꢀꢀ
21—带座轴承;
35.22—透明保护罩;
ꢀꢀꢀꢀꢀꢀ
23—第二伸缩杆;
ꢀꢀꢀꢀꢀꢀ
24—水平连接杆;
36.25—丝杆;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
26—滑块;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
27—支撑座;
37.28—固定座;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
29—丝杆驱动电机;
ꢀꢀꢀꢀ
30—弧形板;
38.31—弧形清洁擦;
ꢀꢀꢀꢀꢀꢀ
32—太阳能板;
ꢀꢀꢀꢀꢀꢀꢀꢀ
33—电池管理模块;
39.34—充电保护模块;
ꢀꢀꢀꢀ
35—安装座;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
36—电机安装板。
具体实施方式
40.如图1至图5所示,本实用新型包括塔身1、均设置在塔身1上的起重臂2和控制室,以及设置在起重臂2上的滑动小车3和与滑动小车3配合的连接器,所述连接器包括箱体4、设置在箱体4内的动滑轮5和设置在箱体4底部的吊钩6,所述滑动小车3上设置有定滑轮,所述定滑轮与动滑轮5之间设置有钢丝绳7,所述箱体4上还设置有用于观测起吊物位置的观测器、用于对所述观测器进行防护的防护器和用于对所述防护器进行清洁的清洁器,以及检测模块和对所述检测模块供电的供电模块;
41.所述观测器包括摄像头8和用于调节摄像头8安装位置的调节器,所述调节器设置在箱体4的底板上,且所述调节器位于箱体4外侧;
42.所述检测模块包括设置在箱体4内的电子线路板,所述电子线路板上集成有微控制器9,所述摄像头8的输出端与微控制器9的输入端连接,所述微控制器9通过无线通信模块10与监控终端11无线通信;
43.所述供电模块包括蓄电池12和与蓄电池12连接的微型发电机13,所述微型发电机13的输入轴与动滑轮5的轮轴固定连接,所述蓄电池12的输出端连接有降压电路14,所述降
压电路14的输出端与微控制器9连接。
44.本实施例中,需要说明的是,通过在箱体4上设置观测器对起吊物的位置进行观测,观测器包括摄像头8,通过摄像头8对施工现场进行视频采集,塔式起重机司机能够通过摄像头8采集到的视频图像对起吊物的位置进行定位,并实时了解吊钩6的工作状态和具体位置,便于塔式起重机司机做出正确的判断和操控对起吊物进行吊起,定位速度快,且定位精度高,有效提高了施工效率;
45.通过设置防护器对摄像头8进行防护,避免施工现场的飞石等物体碰撞摄像头8造成摄像头8损坏,同时,避免施工现场的灰尘附着在摄像头8的表面,确保摄像头8能够采集到清晰的视频图像,保证摄像头8的工作可靠性;
46.通过设置清洁器对附着在防护器的透明保护罩22表面的灰尘进行清理,清理效果好,有效避免因透明保护罩22上灰尘堆积过多而影响摄像头8的正常工作,保证摄像头8的正常工作;
47.通过设置供电模块对摄像头8和微控制器9进行供电,供电模块包括蓄电池12、用于给蓄电池12充电的微型发电机13和太阳能板32,在蓄电池12供电的过程中,一旦有阳光时采用太阳能板32为蓄电池12补能,当钢丝绳7吊起起吊物时,采用微型发电机13为蓄电池12补能,不再需要工作人员短时期内定期去更换蓄电池12,减少了维修人员的劳动强度。
48.本实施例中,实际使用时,动滑轮5通过安装座35安装在箱体4的底板上,动滑轮5的轮轴与安装座35转动配合。
49.本实施例中,实际使用时,微型发电机13的输入轴与塔式起重机上既有的动滑轮5的轮轴连接,当钢丝绳7吊起起吊物时,动滑轮5的轮轴转动,动滑轮5的轮轴转动带动微型发电机13的输入轴转动,使微型发电机13发电,微型发电机13产生的电能为蓄电池12补能,实现塔式起重机工作时机械能的利用,节约资源,使用效果好。
50.本实施例中,摄像头8优选为ov7670摄像头,微控制器9优选为stm32f103c8t6微控制器,无线通信模块10优选为互信智能hx2002gprs无线数传模块,监控终端11优选为塔式起重机司机的手机,摄像头8采集到的视频图像通过微控制器9和无线通信模块10远程传输给控制室内塔式起重机司机的手机,便于塔式起重机司机远程查看摄像头8采集到的施工现场的视频图像,进而对起吊物位置的进行快速定位。
51.本实施例中,降压电路14包括lm2596sdc-dc可调降压模块,通过设置降压电路14将蓄电池12输出的电压降压为5v分别给微控制器9、无线通信模块10和摄像头8供电。
52.如图2、图3、图4和图5所示,本实施例中,所述调节器包括用于调节摄像头8安装高度的高度调节器和用于调节摄像头8安装角度的角度调节座;
53.所述高度调节器包括第一伸缩杆15,所述第一伸缩杆15的外杆设置在箱体4的底板上,所述第一伸缩杆15由微控制器9进行控制;
54.所述角度调节座包括设置在第一伸缩杆15的内杆上的上u型座体16、与上u型座体16配合的下u型座体17,以及设置在上u型座体16上且用于驱动下u型座体17转动的调节座驱动电机18,所述调节座驱动电机18由微控制器9进行控制,所述上u型座体16通过销轴19与下u型座体17铰接,所述下u型座体17与销轴19固定连接,所述上u型座体16与销轴19转动配合,所述销轴19的一端与调节座驱动电机18的输出轴固定连接。
55.本实施例中,通过设置高度调节器调节摄像头8的安装高度,通过设置角度调节座
调节摄像头8的安装角度,提高摄像头8的视频采集范围。
56.本实施例中,实际使用时,第一伸缩杆15与箱体4的底板呈垂直布设,上u型座体16的侧面上设置有供调节座驱动电机18安装的电机安装板36,通过设置调节座驱动电机18驱动下u型座体17转动,对下u型座体17的底板与上u型座体16的底板之间的夹角进行调节,进而调节下u型座体17上的摄像头8的安装角度。
57.如图2、图3、图4和图5所示,本实施例中,所述防护器包括设置在下u型座体17的底板上的旋转驱动电机20、均套设在旋转驱动电机20的输出轴上的带座轴承21和透明保护罩22,所述旋转驱动电机20由微控制器9进行控制,所述摄像头8安装在带座轴承21上,且所述摄像头8位于透明保护罩22内。
58.本实施例中,通过透明保护罩22对摄像头8进行保护,且不影响摄像头8的正常工作,保护效果好;通过设置旋转驱动电机20带动透明保护罩22转动,便于清洁器对透明保护罩22的外侧面进行全方位的清洁。
59.本实施例中,实际使用时,透明保护罩22采用塑料材料制成,重量轻。
60.如图2、图3和图5所示,本实施例中,所述清洁器包括设置在箱体4底部的滑动器、设置在所述滑动器上的第二伸缩杆23、设置在第二伸缩杆23的内杆上的水平连接杆24,以及设置在水平连接杆24远离第二伸缩杆23的端部的弧形清洁器;
61.所述滑动器包括沿箱体4的长度方向布设的丝杆25、套设在丝杆25上且与丝杆25滑动配合的滑块26、对称设置在丝杆25两端的支撑座27和固定座28,以及用于驱动丝杆25转动的丝杆驱动电机29,所述第二伸缩杆23的外杆与滑块26固定连接,所述支撑座27和固定座28均位于箱体4的底面上,所述丝杆驱动电机29由微控制器9进行控制。
62.本实施例中,实际连接时,丝杆驱动电机29安装在箱体4的底板上,丝杆驱动电机29的输出轴与丝杆25的一端传动连接,当需要弧形清洁擦31对透明保护罩22表面的灰尘进行清理时,微控制器9先控制第二伸缩杆23的内杆伸长,直至第二伸缩杆23的内杆伸长到位第二伸缩杆23的内杆伸长带动水平连接杆24和弧形清洁擦31向下移动;微控制器9再控制丝杆驱动电机29正转使滑块26移动至丝杆25远离丝杆驱动电机29的端部,此时,弧形清洁擦31与透明保护罩22的外表面相贴合,微控制器9控制旋转驱动电机20的输出轴转动,旋转驱动电机20的输出轴转动带动透明保护罩22转动,弧形清洁擦31对透明保护罩22的外侧面的灰尘进行全方位的清洁;当透明保护罩22表面的灰尘清理完成后,微控制器9先控制丝杆驱动电机29反转使滑块26移动至丝杆25靠近丝杆驱动电机29的端部,微控制器9再控制第二伸缩杆23的内杆缩回,第二伸缩杆23的内杆缩回带动水平连接杆12和弧形清洁擦31向上移动,避免弧形清洁擦31影响摄像头8的正常工作。
63.如图3所示,本实施例中,所述弧形清洁器包括与透明保护罩22配合的弧形板30,以及设置在弧形板30内侧面的弧形清洁擦31,所述弧形板30呈劣弧形。
64.本实施例中,实际使用时,当弧形清洁擦31对透明保护罩22表面的灰尘进行清理时,弧形清洁擦31的一端位于透明保护罩22与旋转驱动电机20的连接处,弧形清洁擦31的另一端位于透明保护罩22的底部。
65.如图2和图5所示,本实施例中,所述供电模块还包括设置在箱体4的顶板上的太阳能板32,所述太阳能板32的输出端依次通过电池管理模块33和充电保护模块34与蓄电池12的输入端连接。
66.本实施例中,通过设置电池管理模块33和充电保护模块34便于将太阳能板32转换的电能输送至蓄电池12为蓄电池12充电,从而补充蓄电池12的电能。
67.本实施例中,电池管理模块33优选为pl7501c电池管理模块,充电保护模块34优选为pl7022/b充电保护模块。
68.本实用新型具体使用时,通过摄像头8实时采集施工现场的图像,摄像头8采集到的视频图像传输给微控制器9,微控制器9通过无线通信模块10将摄像头8采集到的视频图像远程传输给监控终端11,塔式起重机司机通过监控终端11查看摄像头8采集到的视频图像,塔式起重机司机根据视频图像实时了解吊钩6的工作状态和具体位置,并对起吊物的位置进行定位,塔式起重机司机根据吊钩6的位置和起吊物的位置做出正确的判断和操控对起吊物进行吊起,实现起吊物的快速定位和起吊;同时,在摄像头8开始工作后,微控制器9每隔24小时控制防护器和清洁器工作一次,当微控制器9控制防护器和清洁器工作时,首先,微控制器9控制第二伸缩杆23的内杆伸长,直至第二伸缩杆23的内杆伸长到位,第二伸缩杆23的内杆伸长带动水平连接杆24和弧形清洁擦31向下移动;其次,微控制器9再控制丝杆驱动电机29正转使滑块26移动至丝杆25远离丝杆驱动电机29的端部,此时,弧形清洁擦31与透明保护罩22的外表面相贴合;最后,微控制器9控制旋转驱动电机20的输出轴转动,旋转驱动电机20的输出轴转动带动透明保护罩22转动,弧形清洁擦31对透明保护罩22的外侧面的灰尘进行全方位的清洁;当透明保护罩22表面的灰尘清理完成后,微控制器9先控制丝杆驱动电机29反转使滑块26移动至丝杆25靠近丝杆驱动电机29的端部,微控制器9再控制第二伸缩杆23的内杆缩回,第二伸缩杆23的内杆缩回带动水平连接杆12和弧形清洁擦31向上移动,避免弧形清洁擦31影响摄像头8的正常工作。本实用新型结构简单、设计合理,通过设置摄像头对施工现场进行视频采集,塔式起重机司机能够通过摄像头采集到的视频图像对起吊物的位置进行定位,并实时了解吊钩的工作状态和具体位置,便于塔式起重机司机做出正确的判断和操控对起吊物进行吊起,定位速度快,且定位精度高,省时省力,有效提高了施工效率。
69.以上所述,仅是本实用新型的较佳实施例,并非对本实用新型作任何限制,凡是按照本实用新型技术实质对以上实施例所作的任何简单修改、变更以及等效结构变化,均仍属于本实用新型技术方案的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1