粉粒体供给装置以及粉粒体供给方法与流程
1.本发明涉及在使用移送机构将粉粒体沿横向移送了之后使该粉粒体落下的粉粒体供给装置以及粉粒体供给方法。
背景技术:
2.在粉粒体供给的领域中,公知有使作为贮存于筒仓等容器的原料等的粉粒体在通过移送路沿横向移送了之后落下的方法。这里,作为用于将粉粒体沿横向移送的移送机构,在多数情况下使用螺旋送料器。
3.在这种粉粒体供给方法中,要求使从移送路落下的粉粒体的总落下量(进行了一次移送工序的情况下的总落下量)为恒定量(目标量)。可是,在以往,在螺杆等停止而以目标量移送粉粒体的动作完成了之后,多余的粉粒体从移送路流出并落下,产生与该落下量相应地总落下量超过目标量这样的问题。
4.为了应对这种问题,例如在专利文献1公开有在从移送路的下游端沿移送方向延伸出的位置设置有由板状体构成的接受部的粉粒体供给装置。根据该装置,在将粉粒体沿横向移送的动作完成了之后多余的粉粒体从移送路流出了的情况下,该流出了的粉流体被接受部承挡,从而阻止多余的粉粒体的落下。
5.另外,上述的接受部具有从其延伸出侧端部朝向反延伸出侧的狭缝(开口部)。伴随着该结构,在该文献所公开的装置中,在越过接受部的延伸出侧端部而使大量的粉粒体落下了之后,使微量的粉粒体仅从接受部的狭缝落下。并且,在检测出粉粒体的总落下量与目标量一致的时刻,使将粉粒体沿横向移送的动作停止。
6.现有技术文献
7.专利文献
8.专利文献1:日本特开2018-70340号公报
技术实现要素:
9.发明要解决的课题
10.然而,即使成为如专利文献1所公开的装置那样设置接受部(接受构件)的结构,也还存在应该解决的问题。即,在该文献所公开的装置中,越过接受构件的延伸出侧端部而使粉粒体落下的情况以及使粉粒体仅从接受构件的狭缝落下的情况均基于由螺旋送料器等进行的粉粒体的移送来进行。
11.在该情况下,即使将由螺旋送料器等进行的粉流体的移送停止,来自接受构件的粉粒体的落下也不会立刻停止,而是在暂时继续落下之后停止。此时,继续落下时间、速度(每单位时间内粉粒体落下的量)不恒定而存在偏差。因此,导致使粉粒体的总落下量与目标量一致时的精度的降低。
12.出于以上的观点,本发明的课题在于抑制装置的停止后的粉粒体从接受构件的落下,而提高使总落下量与目标量一致时的精度。
13.用于解决课题的方案
14.为了解决上述课题而做出的本发明的第一方面为一种粉粒体供给装置,具备:移送机构,其通过移送路将粉粒体沿横向移送;以及接受构件,其从所述移送路的下游端沿移送方向延伸出且接受来自所述移送路的粉粒体并使该粉粒体落下,所述粉粒体供给装置的特征在于,所述粉粒体供给装置具备使所述接受构件振动的振动机构。作为这里的移送机构的代表例,可以举出螺旋送料器。
15.根据这种结构,在使移送机构运行时,进行将粉粒体沿横向推出的动作,因此在从接受构件使大量的粉粒体落下的情况下变得有利。另一方面,在使移送机构停止了的状态下使振动机构运行时,不进行将粉粒体沿横向推出的动作,因此能够通过接受构件的振动使少量的粉粒体落下。在该情况下,若使接受构件的振动停止,则来自接受构件的粉粒体的落下立刻停止,因此能够抑制装置的停止后的来自接受构件的粉粒体的落下。因而,若适当地切换该两者,则能够高效并高精度地使粉粒体落下,能够有助于使粉粒体的总落下量与目标量一致时的精度的提高。另外,不需要由移送机构移送粉粒体的移送速度的繁杂控制。
16.关于该装置,也可以是,所述粉体供给装置具备能够针对所述移送机构以及所述振动机构切换运行以及停止的控制机构,所述控制机构构成为,在使所述移送机构运行之后,在使所述移送机构停止了的状态下使所述振动机构运行。
17.如此一来,通过控制机构的动作,在使移送机构运行之后,在使移送机构停止了的状态下使振动机构运行,因此高效并高精度地使粉粒体落下的处理能够变得简单并且可靠。
18.在该装置中,也可以是,所述控制机构构成为,在通过所述移送机构的运行而使粉粒体从所述接受构件落下的量达到预先设定的设定量的情况下,在使所述移送机构停止了的状态下使所述振动机构运行。
19.如此一来,设为通过移送机构的运行使大量的粉粒体从接受构件落下直到粉粒体的落下量达到设定量的方式。该情况下的设定量例如优选为总落下量的目标量的50~95%,更优选为70~90%。并且,在粉粒体的落下量达到设定量的情况下,通过使移送机构停止了的状态下的振动机构的运行,从而能够使剩余的少量(微量)粉粒体从正振动的接受构件没有偏差而准确地落下。由此,能够使粉粒体进一步高效地落下。
20.在以上的结构中,也可以是,对于所述移送路的下游侧端部的粉粒体的移送面与所述接受构件的粉粒体的接受面而言,这两面的至少下方部呈相同形状。
21.如此一来,在移送路的下游侧端部的移送面与接受构件的接受面之间不易形成成为粉粒体的移送的阻力的高低差等。由此,避免由于高低差等的形成而导致粉粒体的停滞、由压缩带来的固化或者由于此而导致移送机构、接受构件的损伤等不良情况。
22.在以上的结构中,也可以是,所述接受构件为板状体且与移送方向正交的截面呈u状。
23.如此一来,接受构件的底部呈朝向下方凸出的弯曲的形状,因此由于该形状而促进使粉粒体落下时的顺畅性以及迅速性等。详细叙述而言,当在接受构件的底部形成有曲折部时,可能产生在该曲折部处粉粒体停滞而固化等弊端。根据这里的结构,接受构件不具有曲折部,因此避免那种弊端的产生。另外,接受构件为板状体,因此能够通过简单的弯曲加工来容易地制作。
24.在该结构中,也可以是,使所述接受构件的厚度比形成所述移送路的移送路形成壁以及形成与所述移送路的下游端连通的供给路的供给路形成壁的厚度薄。
25.如此一来,接受构件比移送路形成壁以及供给路形成壁容易振动。因而,能够利用振动机构对接受构件赋予足够的振动,并使粉粒体的流动性好。
26.在以上的方法中,也可以是,所述接受构件构成为能够更换为沿着移送方向的长度不同的其他接受构件。
27.如此一来,能够适当地应对与粉粒体相关的各种变更。例如,在将粉粒体改变为粒度分布、材质等特性不同的其他粉粒体的情况下,接受构件的上方的粉粒体的安息角改变。在如此安息角改变了的情况下,与安息角相应地改变接受构件的沿着移送方向的长度,从而能够将每单位时间的粉粒体的落下量维持在适当的量。因而,根据这里的结构,能够通过接受构件的更换而适当地应对安息角的变更等。
28.在以上的结构中,也可以是,所述振动机构安装于形成与所述移送路的下游端连通的供给路的供给路形成壁的外表面。
29.如此一来,能够对接受构件适当地赋予振动。详细叙述而言,移送路形成壁为了保持螺杆等驱动机构或者承受在内部充满的粉粒体的压力而被坚固地制作,但供给路形成壁可以不比其坚固。因此,将振动机构安装于供给路形成壁与将振动机构安装于移送路形成壁相比,接受构件容易振动。另外,振动机构安装于移送路形成壁的外表面,因此能够从外部容易地进行其保养检查等,作业性变好。而且,粉粒体不与振动机构接触,因此能够将振动机构的损伤、故障防止于未然。
30.为了解决上述课题而做出的本发明的第二方面为一种粉粒体供给方法,包括:移送工序,通过移送机构的移送路将粉粒体沿横向移送;以及接受落下工序,从所述移送路的下游端沿移送方向延伸出的接受构件接受来自所述移送路的粉粒体并使该粉粒体落下,所述粉粒体供给方法的特征在于,包括使所述接受构件振动的振动工序,并且在所述接受落下工序中,在由所述移送工序将粉粒体沿横向移送的动作完成了的情况下,执行所述振动工序。
31.根据这种方法,在接受落下工序中,首先完成利用移送机构使大量的粉粒体落下的动作,在完成了的情况下通过振动工序的执行而使接受构件振动,由此基于与已叙述的情况相同的理由,能够使剩余的少量(微量)粉粒体落下。另外,在使接受构件的振动停止了的情况下,能够使粉粒体的落下瞬时停止,能够抑制装置的停止后的来自接受部的粉粒体的落下。由此,在粉粒体的总落下量与目标量一致的时刻能够立刻使粉粒体的落下停止。其结果是,能够使粉粒体从接受构件在短时间内高精度地落下。另外,基于与已叙述的情况相同的理由,不需要由移送机构移送粉粒体的移送速度的繁杂的控制。
32.发明效果
33.根据本发明,能够抑制装置的停止后的来自接受构件的粉粒体的落下,提高使总落下量与目标量一致时的精度。
附图说明
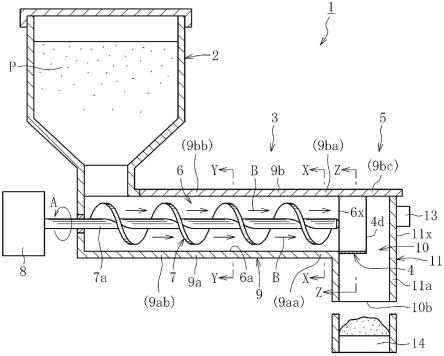
34.图1是示出本发明的实施方式的粉粒体供给装置的整体结构的纵剖侧面。
35.图2是按照图1的x-x线切断而得到的纵剖后视图。
36.图3是按照图1的y-y线切断而得到的纵剖后视图。
37.图4是示出本发明的实施方式的粉粒体供给装置的主要部分结构的放大纵剖侧面。
38.图5是示出作为本发明的实施方式的粉粒体供给装置的构成要素的接受构件的单体立体图。
39.图6是按照图1的z-z线切断而得到的纵剖后视图。
40.图7是示出本发明的实施方式的粉粒体供给装置的作用的主要部分纵剖侧视图。
41.图8是示出本发明的实施方式的粉粒体供给装置的作用的主要部分纵剖侧视图。
具体实施方式
42.以下,参照附图对本发明的实施方式的粉粒体供给装置以及粉粒体供给方法进行说明。
43.图1是示出粉粒体供给装置1的整体结构的纵剖侧视图。如该图所示,粉粒体供给装置1具备贮存容器2、配备于贮存容器2的下部的移送机构3、配置于移送机构3的下游侧的接受构件4以及将粉粒体从接受构件4上落下供给的落下供给部5。
44.贮存容器2由筒仓构成。筒仓2在内部空间贮存以玻璃原料为代表的粉粒体p。优选为在筒仓2的内部空间配备齿轮等搅拌机构(省略图示)。在粉粒体p为玻璃原料的情况下,对在粉粒体供给装置1中接受了各处理之后的玻璃原料实施以下所示那样的处理。即,玻璃原料例如在熔融炉内加热而被熔融,从而成为无碱玻璃、铝硅酸盐玻璃的熔融玻璃。得到的熔融玻璃由溢流下拉法、浮法成形为板玻璃。这种板玻璃在各种显示器、有机el照明等中被用作基板或者盖板。在为铝硅酸盐玻璃的板玻璃的情况下,根据需要实施化学强化处理。
45.移送机构3由螺旋送料器构成。螺旋送料器3具备将贮存于筒仓2的粉粒体p沿横向(优选为水平方向)移送的移送路6以及配备于移送路6的内部的螺杆7。螺杆7通过向箭头a方向的旋转动作,从而将粉粒体p朝向箭头b方向移送。螺杆7的轴构件7a从移送路6的上游端向外侧延伸出,并被从作为驱动源的马达8赋予旋转驱动力。
46.形成移送路6的移送路形成壁9包括主体部9a即主体壁以及覆盖该主体壁9a的上方的盖9b即盖壁。盖9b能够从主体部9a取下。在该实施方式中,对于移送路形成壁9的下游侧端部与比该下游侧端部靠上游侧的部位而言,形状不同。图2是图1的x-x线剖视图,即移送路形成壁9的下游侧端部的剖视图。如该图所示,在该下游侧端部,主体壁9aa呈u状,盖壁9ba呈平板状。图3是图1的y-y线剖视图,即移送路形成壁9的比下游侧端部靠上游侧的部位的剖视图。如该图所示,在该部位,主体壁9ab形成圆弧中的优弧,盖壁9bb形成圆弧中的劣弧。伴随于此,移送路6中的粉粒体p的移送面6a在下游侧端部呈u状(参照图2),在比下游侧端部靠上游侧的部位形成圆弧中的优弧(参照图3)。需要说明的是,盖9b沿移送方向延伸出直到落下供给部5的上部。
47.如图4所示,接受构件4配设于从移送路6的下游端6x沿移送方向(箭头b方向)延伸出的位置。该接受构件4发挥接受来自移送路6的粉粒体p并使该粉粒体p落下的作用。该接受构件4能够由金属板(例如钢板)构成。
48.如图5所示,接受构件4为板状体且在与移送方向正交的截面中主体4a呈u状。在该主体4a的上端的两侧分别形成有向相互远离的方向延伸的座部4b。该接受构件4的接受面
4c与移送路6的下游侧端部的移送面6a呈相同形状(参照图6)。
49.如图1所示,落下供给部5具有与移送路6的下游端6x连通的供给路10。供给路10具有沿着上下方向的流路。形成供给路10的供给路形成壁11由沿着上下方向的纵壁11a以及已叙述的盖9b的延伸出部即盖壁9bc构成。纵壁11a与移送路形成壁9的主体壁9a一体化。
50.图6是图1的z-z线剖视图。如该图所示,接受构件4的座部4b以能够插拔的方式插入纵壁11a的上端与盖壁9bc的下表面之间,仅通过该插入就支承接受构件4。接受构件4的厚度比移送路形成壁9以及供给路形成壁11的厚度薄。具体而言,前者4的厚度为后者9、11的厚度的1/2以下,优选为1/5以下。在图例中,接受构件4的接受面4c与移送路6的移送面6a没有高低差地沿移送方向相连。需要说明的是,接受构件4的接受面4c的底部也可以在3mm以下(优选为2mm以下)的范围内位于比移送路6的移送面6a的底部靠下方的位置。另外,接受构件4的接受面4c的两侧部也可以在3mm以下(优选为2mm以下)的范围内位于比移送路6的移送面6a的两侧部靠两侧外侧的位置。
51.这里,如图4所示,在接受构件4的延伸出侧端部4d与和该延伸出侧端部4d对置的供给路10的对置面10a之间形成有用于使粉粒体p落下的排出路12。俯视时的排出路12的通路面积为俯视时的供给路10的通路面积的10~70%,优选为30~50%。准备沿着移送方向的长度l不同的多个接受构件4。并且,这些多个接受构件4能够更换。在该更换时盖9b开闭。
52.并且,在纵壁11a的外表面11x安装有用于使接受构件4振动的振动机构13。振动机构13的安装位置成为纵壁11a的外表面11x。因而,来自振动机构13的振动经由纵壁11a、接受构件4的延伸出侧端部4d向接受构件4的接受面4c赋予。作为振动机构13,能够使用由各种振动器构成的振动产生机等。
53.在该实施方式中,如图1所示,在供给路10的下方配设有计量粉粒体p的计量器14。从接受构件4落下了的粉粒体p从供给路10的下端开口部10b向计量器14供给。计量器14对由螺旋送料器3进行了一次移送粉粒体p的动作时的粉粒体p的落下量进行计测。并且,在计量器14显示出粉粒体p的总落下量与目标量一致的情况下,该情况由传感器、作业者检测出。在完成了该检测的时刻,计算机等控制机构、作业者使振动机构13停止,由此接受构件4的振动停止。
54.该实施方式的粉粒体供给装置1成为切换螺旋送料器3的运行即螺杆7的旋转与使螺杆7的旋转停止了的状态下的振动机构13的运行的结构。另外,该装置1成为在通过螺杆7的旋转而使粉粒体p从接受构件4落下的量达到预先设定的设定量w的情况下切换为使螺杆7的旋转停止了的状态下的振动机构13的运行的结构。该情况下的设定量w例如优选为总落下量的目标量的60~95%,更优选为70~90%。
55.接下来,对利用具备以上的结构的粉粒体供给装置1移送粉粒体p并使该粉粒体p落下的过程进行说明。
56.首先,使螺旋送料器3的螺杆7旋转,将贮存于筒仓2的粉粒体p通过移送路6沿横向(箭头b方向)移送。进行该移送的期间从缩短所需时间的观点出发,优选为使螺杆7高速旋转。由此,如图7所示,从移送路6送出的大量的粉粒体p被接受构件4接受,并越过接受构件4的延伸出侧端部4d而在供给路10落下。该落下的粉粒体p在计量器14之上积存。在此时刻,振动机构13不运行,因此接受构件4不振动。
57.在进行这种动作的期间,在积存于计量器14的粉粒体p的落下量达到了预先设定
的设定量w的时刻,作业者使螺杆7的旋转停止。
58.在螺杆7的旋转停止了的情况下,如图8所示,接受构件4上的粉粒体p成为规定的安息角θ。在此时刻,作业者使振动机构13的运行开始而使接受构件4振动。由此,进行螺杆7的旋转与使螺杆7的旋转停止了的状态下的振动机构13的运行的切换。更详细而言,在计量器14显示出通过螺杆7的旋转而来自接受构件4的粉粒体p的落下量达到设定量w的情况下,切换为使螺杆7停止了的状态下的振动机构13的运行。通过该切换,剩余的少量(微量)粉粒体p被接受构件4赋予振动并且落下,积存在计量器14之上。并且,在计量器14显示出粉粒体p的总落下量与目标量一致的时刻,作业者使振动机构13停止。
59.接下来,对上述实施方式的粉粒体供给装置1的作用效果进行说明。
60.根据该装置1,在使螺杆7旋转时,进行将粉粒体p沿横向推出的动作,因此在使大量的粉粒体p落下的情况下变得有利。因此,在该装置1中,通过螺杆7的旋转而使大量的粉粒体p落下直到粉粒体p的落下量达到设定量w。以上的结果是,根据该装置1,能够使粉粒体p在短时间内高效地落下。
61.根据该装置1,在粉粒体p的总落下量与目标量一致的时刻使接受构件4的振动停止,因此能够减小从使接受构件4的振动停止到粉粒体p的落下停止的时间延迟。详细叙述而言,伴随着接受构件4的振动,接受构件4上的粉粒体p的量减少。另外,接受构件4上的粉粒体p成为均匀的状态,换言之,接受构件4上的粉粒体p的上表面从倾斜面变化为水平面。若在该状态下使接受构件4的振动停止,则能够使来自接受构件4的粉粒体p的落下瞬时停止。因而,若在计量器14显示出粉粒体p的总落下量与目标量一致的时刻使振动机构13停止,则粉粒体p的落下立刻停止。由此,能够抑制装置1的停止后的来自接受部4的粉粒体p的落下,提高使总落下量与目标量一致时的精度。
62.根据该装置1,仅在使粉粒体p大量落下的情况下使螺杆7旋转即可,因此不需要在中途改变螺杆7的旋转速度,不需要繁琐的旋转控制。
63.根据该装置1,移送路6的下游侧端部的移送面6a与接受构件4的接受面4c呈相同形状,因此不易在该两面6a、4c的彼此间形成成为粉粒体p的移送的阻力的高低差等。由此,避免由高低差等的形成而导致粉粒体p的停滞、由压缩带来的固化或者由于此而导致螺旋送料器3、接受构件4的损伤等不良情况。
64.作为该装置1的构成要素的接受构件4为板状体且与移送方向正交的截面呈在底部具有朝向下方凸出的弯曲形状的u状,因此由于该形状而促进使粉粒体p落下时的顺畅性以及迅速性等。详细叙述而言,当在接受构件4形成有曲折部时,可能产生在该曲折部处粉粒体p停滞而固化等弊端。该接受构件4不具有曲折部,因此避免这种弊端的产生。另外,接受构件4为板状体,因此能够通过简单的弯曲加工而容易地制作。
65.上述的接受构件4的厚度比移送路形成壁9以及供给路形成壁11的厚度薄,因此接受构件4比这些壁9、11容易振动。由此,能够利用振动机构13对接受构件4赋予足够的振动,更进一步可靠地使粉粒体p的流动性好。
66.上述的接受构件4被准备了沿着移送方向的长度l不同的多个,且这些多个接受构件4能够更换,因此能够适当地应对与粉粒体p相关的各种变更。例如,在将粉粒体p改变为粘土等特性不同的其他粉粒体的情况下,接受构件4的上方的粉粒体p的安息角θ改变。在如此安息角θ改变了的情况下,与安息角θ相应地改变接受构件4的沿着移送方向的长度l,从
而能够将每单位时间的粉粒体p的落下量维持为适当的量。因而,通过适当更换准备有多个的接受构件4从而能够适当地应对安息角θ的变更等。
67.上述的接受构件4由于仅通过座部4b插入纵壁11a的上端与盖9b的下表面之间而被支承,因此接受构件4容易振动,并且能够容易地进行其更换。
68.根据该装置1,振动机构13安装于供给路形成壁11中的纵壁11a的外表面,因此能够使接受构件4适当地振动。详细叙述而言,移送路形成壁9为了保持螺杆7而被坚固地制作,但供给路形成壁11可以不比其坚固。因此,将振动机构13安装于供给路形成壁11(纵壁11a)与将振动机构13安装于移送路形成壁9相比,容易使接受构件4振动。另外,振动机构13安装于纵壁11a的外表面11x,因此能够从外部进行其保养检查等,作业性好。而且,粉粒体p不易与振动机构13接触,因此能够将振动机构13的损伤、故障防止于未然。
69.根据该装置1,移送路形成壁9的主体壁9a的上部与供给路形成壁11的纵壁11a的上部被盖9b覆盖,因此通过将盖9b取下,从而能够一次性目视确认移送路6的内部、螺杆7、供给路10的内部以及接受构件4。由此,能够一次性同时进行这些保养检查等,对作业者而言是有利的。
70.接下来,对使用上述的粉粒体供给装置1来供给粉粒体的粉粒体供给方法进行说明。
71.本实施方式的粉粒体供给方法大致区分的话包括移送工序、接受落下工序以及振动工序。
72.移送工序是通过螺旋送料器3的移送路6将粉粒体p沿横向移送的工序。
73.接受落下工序是接受构件4接受从移送路6送出的粉粒体p并使该粉粒体p落下的工序。
74.振动工序是利用振动机构13使接受构件4振动的工序。
75.并且,在接受落下工序中,在移送工序中将粉粒体p沿横向移送的动作完成了之后,执行振动工序。这里,“在将粉粒体p沿横向移送的动作完成了之后”的意思是指通过螺旋送料器3的运行而使粉粒体p从接受构件4落下的量达到了设定量w之后。
76.以上,对本发明的实施方式的粉粒体供给装置1以及粉粒体供给方法进行了说明,但本发明并不限定于此,能够在不脱离其主旨的范围内进行各种变更。
77.在上述实施方式中,在螺旋送料器(移送机构)3正运行时使振动机构13停止,但也可以是在移送机构3正运行时也使振动机构13运行。
78.在上述实施方式中,将移送路形成壁9分离为主体壁9a与盖9b而构成,但也可以不如此分离而设为一体化。另外,移送路形成壁9在下游侧端部与比该下游侧端部靠上游侧的部位处形状不同,但该两者也可以是与它们中的任一方相同的形状。
79.在上述实施方式中,将接受构件4的主体4a的截面设为u状,但例如也可以将主体4a的截面设为部分圆弧状、v状等,而且也可以将接受构件4自身设为管状或者水平的平板状等。另外,接受构件4只要形成已叙述那样的接受面4c,则也可以不是板状体。而且,接受构件4的接受面4c的形状与移送路6的接受面4c的下游侧端部的形状为上方部以及下方部这两方相同,但也可以仅下方部相同。另外,在接受构件4未形成有狭缝等开口部,但也可以形成有开口部。而且,支承接受构件4的机构也可以使用螺栓等紧固构件。
80.在上述实施方式中,通过使接受构件4的厚度比移送路形成壁9以及供给路形成壁
11的厚度薄,从而使接受构件4容易振动,但也可以通过使接受构件4的材质比移送路形成壁9以及供给路形成壁11的材质软或者容易变形,从而使接受构件4容易振动。
81.在上述实施方式中,将振动机构13安装于供给路形成壁11的外表面的特定部位,但也可以安装于供给路形成壁11的外表面的其他部位或盖壁9bc的外表面,而且还可以安装于移送路形成壁9的外表面。另外,也可以将振动机构13安装于供给路形成壁11、盖壁9bc、移送路形成壁9的内表面,还可以安装于接受构件4。从保养检查的作业性、防止故障的观点出发,优选为配置于供给路10以及移送路6的外部。另外,振动机构13不必须为一个,也可以安装多个。在该情况下,既可以在供给路形成壁11安装全部多个,或者也可以安装于供给路形成壁11与移送路形成壁9这两方。而且,振动机构13既可以以能够装卸的方式安装,也可以以能够变更位置的方式安装。若以能够变更位置的方式安装,则能够通过与粉粒体p相关的各种变更相应地变更振动机构13的安装位置而调整接受构件4的振动方式,能够将伴随着振动而从接受构件4落下的粉粒体p的量控制在优选的范围。
82.在上述实施方式中,利用螺旋送料器构成了移送机构3,但例如也可以利用振动送料器等其他移送机构构成移送机构3。即使在如此的情况下,在振动送料器等其他移送机构运行时也进行将粉粒体沿横向推出的动作,因此也不损害本发明的主旨。
83.在上述实施方式中,作业者对移送机构(螺旋送料器3)以及振动机构13切换运行与停止,但也可以是粉体供给装置1具备能够对移送机构以及振动机构13切换运行以及停止的控制机构,也可以利用控制机构进行切换。
84.附图标记说明
85.1粉粒体供给装置
86.3移送机构(螺旋送料器)
87.4接受构件
88.4c接受面
89.6移送路
90.6a移送面
91.6x移送路的下游端
92.9移送路形成壁
93.9a主体部(主体壁)
94.9aa下游侧端部的主体壁
95.9ab上游侧的部位的主体壁
96.9b、9ba、9bb、9bc盖(盖壁)
97.10供给路
98.11供给路形成壁
99.11x供给路形成壁的外表面
100.13振动机构
101.p粉粒体。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1