用于吊装起重机的提升设备、起重机和用于提升的方法与流程
本发明涉及一种用于吊装起重机(lifting crane)的提升设备,其适于承载细长部件,特别是风力涡轮机的转子叶片,该提升设备包括框架,该框架具有用于承载该部件的至少两个支撑臂。
背景技术:
1、大型和细长的部件通常由吊装起重机移动,该吊装起重机适于提升和定位相应的部件,以便例如将其附接到建筑物。这样的部件的一个示例为风力涡轮机的转子叶片,当风力涡轮机被安装时,该转子叶片需要被定位和固定到风力涡轮机的轮毂,通常三个转子叶片被附接到该轮毂。为了提升这样的部件或相应的转子叶片,使用特定的提升设备,该提升设备被连接到该吊装起重机,并适于安全地承载该部件。该提升设备包括框架,该框架具有用于承载该部件的至少两个支撑臂,所述支撑臂具有例如l形或c形形状。该提升设备适于以水平定向承载该部件或相应的转子叶片,这对于降低施加于起重机吊架的负载是有利的,该负载由于叶片尺寸的增加而变得更大。为了控制该部件或相应的叶片的水平移动,通常使用稳定索系统,该稳定索系统包括附接到该提升设备的若干缆索。这允许对水平移动的一定的控制。然而,尤其是当该部件或相应的叶片在较高风速下被提升时,会发生一定的竖直移动,考虑到叶片根部的竖直移动,这是尤其成问题的,该叶片根部需要相对于轮毂的附接接口精确定位。该竖直移动或相应的竖直倾斜力矩由转子叶片的翼型剖面造成。当风以较高的速度在转子叶片周围吹动时,在叶片的上侧和下侧处会出现不同的风速,从而导致该上侧和下侧之间的压差。该些压差导致一定的吸力或曳引效应,从而使叶片移动到较低压侧。该效应又导致倾斜移动,这是因为该叶片作为整体依循该效应。该效应从飞机机翼是公知的,但是对例如涡轮叶片的安装过程具有负面影响。
2、该竖直移动可能负面地影响定位和固定过程。由于其是由与所述部件、尤其是翼型形状的叶片相互作用的风造成的,因此其将安装限制在风速很低的时候,并且因此,缩小了可进行安装的天气窗口。这对于风力涡轮机的离岸安装尤其成问题,因为海上的风往往很强。此外,由于在定位根部方面的问题,该竖直移动还导致长安装时间。
技术实现思路
1、因此,本发明的一个目的在于提供一种改进的提升设备。
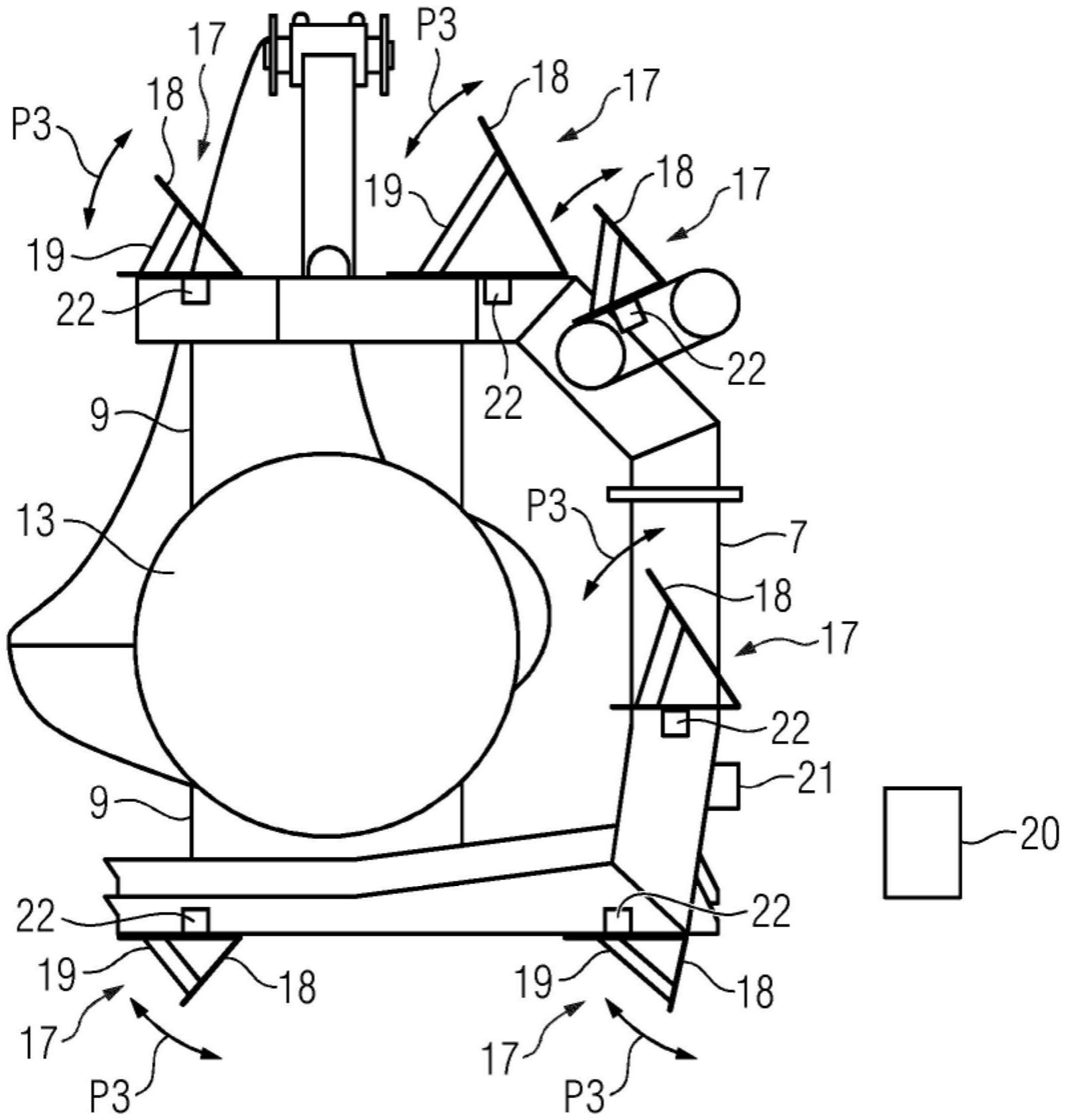
2、为了解决该目的,本发明提出了一种用于吊装起重机的提升设备,该提升设备适于承载细长部件,尤其是风力涡轮机的转子叶片,该提升设备包括框架,该框架具有用于承载该部件的至少两个支撑臂,该提升设备的特征在于,用于与吹动的风相互作用的至少一个襟翼状相互作用装置被设置在该框架或支撑臂处,该襟翼状相互作用装置可从非工作位置移动到工作位置,在该工作位置,它被设置成抵抗风。
3、通常也称为轭的本发明的提升设备配备有一个或多个襟翼状相互作用装置,其也可被称为扰流板装置。该些襟翼状或扰流板状的相互作用装置可在非工作位置和工作位置之间移动,在该非工作位置,其不与吹动的风相互作用,在该工作位置,其被展开或定向成抵抗风,使得其与吹动的风相互作用。这种布置使得当也可被称为箭形襟翼(arrow flap)的该相互作用装置移动到工作位置时,该提升设备的空气动力设置局部受到该相互作用装置影响。当风与一个或多个襟翼状或扰流板状的元件相互作用时,在该提升设备上施加反作用力,该反作用力对该提升设备产生一定的倾斜力矩,如所提到的,该提升设备在某个附接点处附接到吊装起重机。该抵消性的倾斜力矩可至少部分地、优选为完全地平衡作用在该部件或相应的转子叶片上的风引起的倾斜力矩,该倾斜力矩引起不期望的竖直移动。通过借助将襟翼状相互作用装置移动到工作位置来产生该抵消性的倾斜力矩,并且由此改变该提升设备的形状或相应的空气动力特性,可至少部分地、优选为完全地补偿由较高风速引起的不期望的倾斜力矩。这允许例如风力涡轮机叶片的安装过程得到改善并且尤其是更快,该安装过程现在也可在例如高达16m/s或更高的更高风速下执行,其中,在该些高风速下的转子叶片安装或者利用已知的提升设备是不可能的,或者由于不可控制的竖直倾斜而需要更多的时间。
4、优选地,若干个襟翼状相互作用装置被布置在所述框架和/或至少一个支撑臂处的不同位置处。使用若干个襟翼状相互作用装置允许更好地控制产生的反倾斜力矩或移动,因为这些若干个襟翼状相互作用装置允许提升设备的整体空气动力形状的各种改变。
5、由于风可能从不同侧吹来,因此有利的是,具有可在优选为彼此相反的不同方向上设置成抵抗风的襟翼状相互作用装置。这允许与从不同方向、尤其是相反方向吹来的风相互作用。
6、优选地,该至少一个或若干个襟翼状相互作用装置被布置成靠近或处于所述框架的端部或者处于所述支撑臂的顶部或底部或侧面处。优选地,该一个或多个襟翼状相互作用装置被布置成与提升设备附接到起重机的提升装置的点隔开一定距离,使得实现较大的杠杆,这允许产生相对高的反倾斜力矩或移动。只要适当,该若干个相互作用装置可被布置在该框架或支撑臂处的不同位置处,沿该框架的纵向方向观察,优选地布置在该框架的端部处,或者布置在该支撑臂的顶部、底部或侧面处。
7、在一个优选实施例中,该若干个襟翼状相互作用装置被布置成靠近或处于所述框架的两端或者处于二个支撑臂的顶部或底部或侧面处。根据该实施例,相对于提升设备与起重机的提升装置的附接点,该若干个襟翼状相互作用装置被布置在两侧上。这允许精确地控制或相应地抵消叶片根部沿向上或向下方向的竖直移动,该移动取决于被提升设备抓持的叶片的定向以及其与吹动的风的相互作用。尤其是当若干个襟翼状相互作用装置分布在两侧处时,并且如果每组相互作用装置包括可以不同角度朝向风定位的若干个襟翼,则非常精确地控制和产生抵消性的倾斜力矩是可能的。并且当相互作用装置的每个相应的端侧组包括可设置成抵抗不同风向的相互作用装置时,在各种不同的风况下的补偿是可能的。
8、在第一实施例中,所述襟翼状相互作用装置或所述襟翼状相互作用装置中的至少一个被枢转地安装在所述框架或所述支撑臂处。这允许简单地将襟翼状装置从非工作位置旋转或枢转到工作位置,或者旋转或枢转到非工作位置和最大工作位置之间的任何位置,当然其也可定位在该最大工作位置。优选地,所有襟翼状相互作用装置被枢转地安装到该框架或臂,并且因此,可被简单地旋转到必要的位置。
9、在这种枢转布置结构的替代方案中,可能的是,所述若干个襟翼状相互作用装置或所述若干个襟翼状相互作用装置中的至少一个可通过在所述框架或支撑臂处移位来移动。在该实施例中,每个襟翼状装置都简单地以线性移动从非工作位置被推动到工作位置。此外,这也允许简单的位置改变。在另一实施例中,该移位移动不仅可以是线性移动,而且可以是组合的线性和弯曲移动,使得相应的襟翼沿弯曲的移动线被推动和升起。
10、根据本发明的另一实施例,该至少一个或每个襟翼状相互作用装置可沿所述框架或所述支撑臂移位,以改变其框架或臂位置。这不仅允许将相应襟翼的位置从非工作位置改变到工作位置,而且还允许改变相应襟翼在框架或支撑臂处的整体位置。其可沿该框架的纵向轴线的方向移位,或者也可与之垂直地移位。这在相应襟翼的定位方面以及为改变提升设备的整体空气动力形状提供了进一步的自由度,并且因此,允许甚至进一步改善对产生反倾斜力矩的控制。为了实现该线性移位移动,相应的襟翼通过相应的线性引导件或轨道布置到该框架或支撑臂,它们可沿这些线性引导件或轨道移动。
11、为了将该至少一个襟翼状相互作用装置或相应的每个单独的相互作用装置至少从非工作位置移动到工作位置和/或至少为了改变在该框架或支撑臂处的位置,为每个襟翼设置至少一个可控的致动器。该致动器将襟翼或扰流板从非工作位置移动到工作位置,以用于改变该框架或臂处的襟翼或扰流板位置。当从非工作位置到工作位置的移动以及框架或臂处的位置改变两者都可能时,为每个襟翼设置用于每种类型的移动的两个相应的致动器。
12、这样的致动器为液压或气动或电动缸,或者电动马达,其中任何一种致动器由相应的控制装置来控制。
13、优选地,至少一个控制装置被设置用于尤其是通过控制所述或每个致动器,来控制至少一个或最优选地每个襟翼状相互作用装置的移动。包括相应的可编程控制器的该控制装置允许非常精确地控制所述或每个单独的襟翼的移动,以便产生反倾斜力矩。
14、为了实现非常精确的控制,优选地设置至少一个传感器装置,其用于感测该提升设备或框架或至少一个臂的给出或即将发生的竖直倾斜或移动,由此,该控制装置适于根据该传感器装置的信息来控制该至少一个或若干个襟翼状相互作用装置的移动。一般来说,该传感器装置适于感测该提升设备的竖直移动。它被布置在该框架或支撑臂处,而当然若干各种传感器也可布置在不同位置处。所述或每个传感器装置与至少一个控制装置、优选为控制所有空气动力学襟翼的移动的整体控制装置通信。该控制装置适于处理相应的传感器装置信息,并识别叶片或相应的叶片根部的任何不允许的竖直移动。基于已经给出的或者由于传感器信息而可预期的测量的竖直移动,该控制装置可激活和控制相应的襟翼或相应的致动器,以用于产生反倾斜力矩或相应的反移动。该传感器装置可直接测量定向或移动,或者,也许利用一个或多个单独的传感器来测量,例如,风速或风向作为用于确定给出或即将发生的倾斜移动的间接参数。
15、本发明还涉及一种包括提升装置的起重机,该提升装置具有如上所述的提升设备。所述起重机可包括提升装置,所述提升装置包括一个或多个提升缆索,连接装置被附接到所述提升缆索,所述提升设备被附接在所述连接装置处。该提升设备可相对于该连接装置在竖直方向上倾斜,相应地可围绕水平轴线倾斜。该反倾斜力矩或该反倾斜移动抵消或补偿了这种不期望的竖直倾斜力矩或不期望的竖直倾斜移动,并将该部件或相应的转子叶片稳定在其水平位置。
16、此外,为了还抵消该部件或相应的叶片的任何水平移动,即围绕该竖直轴线的任何倾斜或旋转,一个或多个稳定索可被附接到该提升设备。
17、最后,本发明涉及一种用于使用如上所述的起重机来提升部件、尤其是风力涡轮机的转子叶片的方法。该方法的特征在于,在提升过程期间,当检测到提升设备的倾斜移动或至少这样的倾斜移动的可能性时,该至少一个襟翼状相互作用装置或者该若干个襟翼状相互作用装置中的一个或多个从非工作位置移动到工作位置,以便抵消所述倾斜移动。即使当一个或各种传感器感测到这种不期望的竖直倾斜移动的可能性时,这种传感器信息也可被处理,并被用为不期望的竖直移动可能发生的提示,从而允许控制装置预先立即作出反应。
18、在提升过程期间,提升设备的定向可不断地被所述提升设备的至少一个传感器装置感测,由此,该一个或多个襟翼状相互作用装置由控制装置基于所提供的传感器装置信息来控制。该一个或若干个传感器装置允许不断地监测所述位置或相应的移动或任何其他相关信息,如风速或风向,而控制装置不断地处理任何传感器装置信息,以在必要时立即控制任何襟翼。
19、最后,控制装置不仅可控制襟翼状相互作用装置从非工作位置到工作位置的移动,而且还可控制用于改变相应的襟翼状相互作用装置在该框架或支撑臂处的位置的移动。这甚至扩大了改变所述提升设备的整体空气动力形状的多样性。
- 还没有人留言评论。精彩留言会获得点赞!