一种物流货物智能装车的方法与流程
1.本发明涉及货物装车技术领域,尤其涉及一种物流货物智能装车的方法。
背景技术:
2.随着电子商务和网络购物的盛行,物流需求空前巨大,催生了众多物流企业并带动了物流业的快速发展。虽然现今物流行业正蓬勃发展,欣欣向荣,但其仍没有解决人工物流分货造成的种种问题,如人工分发成本高、耽误物流货物分发等,而这些问题已经使得物流企业在面对急剧增长的物流需求时造成了极大的压力乃至超负荷运转,为了解决上述困难应该有一种新的方法来解除这一阻碍从而提升物流业飞速发展,以满足社会对物流业成本低、越便捷的需求;物流是物品从供应地向接收地的实体流动过程中,根据实际需要,将运输、储存、装卸搬运、包装、流通加工、配送、信息处理等功能有机结合起来实现用户要求的过程;
3.另外,现有的物流货物要通过货车运输至远方时,需将货物搬到车斗旁,再由人工将货物搬上货车车斗上,而人工对货物进行装车时,费时费力、需要多个人一起合作才能将货物搬上车斗内,劳动强度大,工作效率低。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在装车劳动强度大的缺点,而提出的一种物流货物智能装车装置。
5.为了实现上述目的,本发明采用了如下技术方案:
6.设计一种物流货物智能装车装置,包括机架、传送机构、分类机构、若干限位机构和若干装车机构,所述传送机构安装在机架的内侧、以运输货物到分类机构,所述分类机构安装在传送机构的输出端,若干所述限位机构安在分类机构的底端,若干所述装车机构与限位机构一一对应、且安装在相应的限位机构的下方。
7.优选的,所述传送机构包括两个第一传动辊、第一传送带和第一电机,两个所述第一传动辊分别转动安装在机架内侧的两端,两个所述第一传动辊通过第一传送带传动连接,所述第一电机固定安装在机架的外侧,所述第一电机的输出轴与相应的第一传动辊固定连接。
8.优选的,所述分类机构包括分料仓、两个第二传动辊、第二电机、第二传送带、若干分隔板和若干扫码摄像头,所述分料仓固定安装在机架的一端,两个所述第二传动辊分别转动安装在分料仓的两端,两个所述第二传动辊通过第二传送带传动连接,若干所述分隔板均匀固定安装在第二传送带上,所述第二电机固定安装在分料仓的顶部,所述第二电机的输出轴与相应的第二传动辊固定连接,若干所述扫码摄像头均匀固定安装在分料仓的内侧。
9.优选的,所述限位机构包括若干限位板,所述分料仓的底部开设有若干与限位板相匹配的落料槽,若干所述落料槽若干与扫码摄像头一一对应,若干所述落料槽底部的两
侧均固定安装有滑轨,若干所述限位板与相应的滑轨滑动连接,所述分料仓的底部固定安装有若干与限位板一一对应的气缸,若干所述气缸的输出端与相应的限位板固定连接。
10.优选的,所述装车机构包括齿条导轨、行走组件和叉货组件,所述行走组件可移动的安装在齿条导轨上,所述叉货组件安装在行走组件的顶部。
11.优选的,所述行走组件包括支撑座、若干行走齿轮、第三电机和若干导向轮,若干所述行走齿轮均匀分布在支撑座的内侧、且均与支撑座转动连接,若干所述行走齿轮均与齿条导轨啮合,所述第三电机固定安装在支撑座的外侧,所述第三电机的输出轴与任意一个行走齿轮固定连接,若干所述导向轮等数量的转动安装在支撑座的两侧,若干所述导向轮均可与齿条导轨的侧壁贴合。
12.优选的,所述叉货组件包括安装架、第四电机、丝杆和滑块,所述安装架固定安装在支撑座的顶部,所述第四电机固定安装在安装架的顶部,所述第四电机的输出轴与丝杆固定连接,所述滑块的一端螺纹安装在丝杆上,所述安装架上开设有与滑块相匹配的滑槽,所述滑块的另一端与滑槽滑动连接。
13.优选的,所述叉货组件还包括滑动座、第五电机、转盘和货叉板,所述滑动座与滑块的端部固定连接,所述第五电机固定安装在滑动座的底部,所述第五电机的输出轴与转盘固定连接,所述货叉板固定安装在转盘的顶部。
14.本发明还提供了一种物流货物智能装车的方法,包括如下步骤;
15.步骤1:将货物的信息逐一录入物流系统,并将相应的分类条码张贴在相应的货物上;
16.步骤2:将货物装入传送机构上,通过第一传送带将货物匀速运输到分料仓内,通过第二传送带上分隔板的带动,将货物逐一运送到不同的限位机构,同时经过不同的扫码摄像头进行扫描识别货物信息;
17.步骤3:不同落料槽对应的扫码摄像头识别到相应的货物后,第二电机会暂时停机,同时气缸带动相应的限位板与落料槽脱离,此时相应的货物从落料槽掉落到货叉板上;然后气缸带动气缸相应的限位板恢复原位;
18.步骤4:在货物掉落到货叉板后,启动第三电机使得行走齿轮沿着齿条导轨滚动,直到将货物运输到指定位置停止移动;
19.步骤5:最后通过第四电机驱动丝杆转动,滑块带动滑动座移动将货物运送到相应的高度;然后启动第五电机带动转盘转动,货叉板将货物直接运送到运输车上完成装车。
20.本发明提出的一种物流货物智能装车装置,有益效果在于:本发明的对货物的装车过程完全实现自动化装车,同时可以对货物进行智能分类运输,大大减少了人工装车的劳动量,同时也提高了物流货物的装车效率。
附图说明
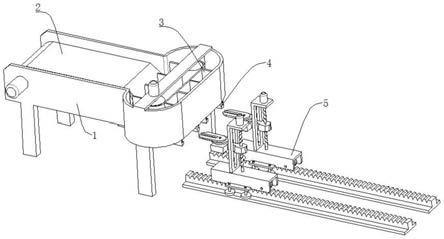
21.图1为本发明提出的一种物流货物智能装车装置的结构示意图;
22.图2为本发明提出的一种物流货物智能装车装置的分类机构的结构示意图;
23.图3为本发明提出的一种物流货物智能装车装置的限位机构的结构示意图;
24.图4为本发明提出的一种物流货物智能装车装置的装车机构的结构示意图;
25.图5为本发明提出的一种物流货物智能装车装置的行走组件和叉货组件的结构示
意图。
26.图中:机架1、传送机构2、第一传动辊21、第一传送带22、第一电机23、分类机构3、分料仓31、第二传动辊32、第二电机33、第二传送带34、分隔板35、扫码摄像头36、限位机构4、落料槽41、滑轨42、限位板43、气缸44、装车机构5、齿条导轨51、行走组件52、支撑座521、行走齿轮522、第三电机523、导向轮524、叉货组件53、安装架531、第四电机532、丝杆533、滑块534、滑槽535、滑动座536、第五电机537、转盘538、货叉板539。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
28.参照图1-5,一种物流货物智能装车装置,包括机架1、传送机构2、分类机构3、若干限位机构4和若干装车机构5,传送机构2安装在机架1的内侧、以运输货物到分类机构3,分类机构3安装在传送机构2的输出端,若干限位机构4安在分类机构3的底端,若干装车机构5与限位机构4一一对应、且安装在相应的限位机构4的下方;
29.传送机构2包括两个第一传动辊21、第一传送带22和第一电机23,两个第一传动辊21分别转动安装在机架1内侧的两端,两个第一传动辊21通过第一传送带22传动连接,第一电机23固定安装在机架1的外侧,第一电机23的输出轴与相应的第一传动辊21固定连接;通过第一电机23的驱动使得相应的第一传动辊21转动,从而使得第一传送带22将货物运送到分类机构3上;
30.分类机构3包括分料仓31、两个第二传动辊32、第二电机33、第二传送带34、若干分隔板35和若干扫码摄像头36,分料仓31固定安装在机架1的一端,两个第二传动辊32分别转动安装在分料仓31的两端,两个第二传动辊32通过第二传送带34传动连接,若干分隔板35均匀固定安装在第二传送带34上,第二电机33固定安装在分料仓31的顶部,第二电机33的输出轴与相应的第二传动辊32固定连接,若干扫码摄像头36均匀固定安装在分料仓31的内侧;通过第二电机33的驱动使得两个第二传动辊32转动,从而使得第二传送带34上的分隔板35将货物逐一运输到不同扫码摄像头36的位置,而扫码摄像头36可以对相应的货物的条码进行扫码识别,确定该货物是否是相应类型的货物;
31.限位机构4包括若干限位板43,分料仓31的底部开设有若干与限位板43相匹配的落料槽41,若干落料槽41若干与扫码摄像头36一一对应,若干落料槽41底部的两侧均固定安装有滑轨42,若干限位板43与相应的滑轨42滑动连接,分料仓31的底部固定安装有若干与限位板43一一对应的气缸44,若干气缸44的输出端与相应的限位板43固定连接;通过气缸44可以带动限位板43与滑轨42发生滑动,从而使得限位板43与落料槽41脱离,进而使得落料槽上的货物掉落到相应的装车机构5上;
32.装车机构5包括齿条导轨51、行走组件52和叉货组件53,行走组件52可移动的安装在齿条导轨51上,叉货组件53安装在行走组件52的顶部;行走组件52包括支撑座521、若干行走齿轮522、第三电机523和若干导向轮524,若干行走齿轮522均匀分布在支撑座521的内侧、且均与支撑座521转动连接,若干行走齿轮522均与齿条导轨51啮合,第三电机523固定安装在支撑座521的外侧,第三电机523的输出轴与任意一个行走齿轮522固定连接,若干导向轮524等数量的转动安装在支撑座521的两侧,若干导向轮524均可与齿条导轨51的侧壁
贴合;通过第三电机523的驱动使得相应的行走齿轮522转动,从而使得行走齿轮522带动支撑座521沿着齿条导轨51移动,进而将货物运输到指定位置;
33.叉货组件53包括安装架531、第四电机532、丝杆533、滑块534、滑动座536、第五电机537、转盘538和货叉板539,安装架531固定安装在支撑座521的顶部,第四电机532固定安装在安装架531的顶部,第四电机532的输出轴与丝杆533固定连接,滑块534的一端螺纹安装在丝杆533上,安装架531上开设有与滑块534相匹配的滑槽535,滑块534的另一端与滑槽535滑动连接;滑动座536与滑块534的端部固定连接,第五电机537固定安装在滑动座536的底部,第五电机537的输出轴与转盘538固定连接,货叉板539固定安装在转盘538的顶部。
34.工作原理:过第一电机23的驱动使得相应的第一传动辊21转动,从而使得第一传送带22将货物运送到分类机构3上;通过第二电机33的驱动使得两个第二传动辊32转动,从而使得第二传送带34上的分隔板35将货物逐一运输到不同扫码摄像头36的位置;通过气缸44可以带动限位板43与滑轨42发生滑动,从而使得限位板43与落料槽41脱离,进而使得落料槽上的货物掉落到相应的装车机构5上;通过第三电机523的驱动使得相应的行走齿轮522转动,从而使得行走齿轮522带动支撑座521沿着齿条导轨51移动,进而将货物运输到指定位置;通过第四电机532带动丝杆533转动,从而使得滑块534带动滑动座536向上提升,进而将货物运送到相应的高度;通过第五电机537带动转盘538转动,从而使得货叉板539转动将货物运送装车。
35.本发明的对货物的装车过程完全实现自动化装车,同时可以对货物进行智能分类运输,大大减少了人工装车的劳动量,同时也提高了物流货物的装车效率。
36.本发明还提供了一种物流货物智能装车的方法,包括如下步骤;
37.步骤1:将货物的信息逐一录入物流系统,并将相应的分类条码张贴在相应的货物上;
38.步骤2:将货物装入传送机构2上,通过第一传送带22将货物匀速运输到分料仓31内,通过第二传送带34上分隔板35的带动,将货物逐一运送到不同的限位机构4,同时经过不同的扫码摄像头36进行扫描识别货物信息;
39.步骤3:不同落料槽41对应的扫码摄像头36识别到相应的货物后,第二电机33会暂时停机,同时气缸44带动相应的限位板43与落料槽41脱离,此时相应的货物从落料槽41掉落到货叉板539上;然后气缸带动气缸44相应的限位板43恢复原位;
40.步骤4:在货物掉落到货叉板539后,启动第三电机523使得行走齿轮522沿着齿条导轨51滚动,直到将货物运输到指定位置停止移动;
41.步骤5:最后通过第四电机532驱动丝杆533转动,滑块534带动滑动座536移动将货物运送到相应的高度;然后启动第五电机537带动转盘538转动,货叉板539将货物直接运送到运输车上完成装车。
42.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1