自主移动系统、自主移动方法和存储介质与流程
1.本发明涉及一种自主移动系统、自主移动方法和存储有自主移动程序的存储介质。
背景技术:
2.wo2017/199343描述了一种电梯系统,在电梯的轿厢到达的楼层是自主移动装置的目的地楼层的情况下,该电梯系统将自主移动装置移动到门附近的位置。
技术实现要素:
3.在人或物体在目的地楼层之前的楼层进入电梯的情况下,自主移动装置可能阻挡人或物体的移动路线。
4.本发明是为了解决该问题而做出的,并且提供了一种自主移动系统、自主移动方法和存储有自主移动程序的存储介质,其使得能够抑制对人或物体的移动路线的阻挡。
5.根据实施例的自主移动系统是在包括电梯的设施中执行自主移动的自主移动系统,其中,所述自主移动系统基于进入所述电梯的轿厢的人或进入所述轿厢的物体来移动所述轿厢中的等待位置。通过该配置,能够抑制对人或物体的移动路线的阻挡。
6.上述自主移动系统可以在所述轿厢停在楼层之前或在所述轿厢的门打开之前确定所述人或所述物体,并且可以在所述轿厢停在所述楼层之前或在所述轿厢的所述门打开之前移动所述等待位置。通过该配置,能够缩短轿厢停在楼层的时间。
7.在所述轿厢到达所述人或所述物体的目的地楼层之前所述轿厢到达所述自主移动系统的目的地楼层的情况下,上述自主移动系统可以在所述人或所述物体进入所述轿厢的楼层暂先从所述轿厢下来,并且可以在所述人或所述物体进入所述轿厢之后进入所述轿厢。通过该配置,能够抑制对人或物体的干扰,并且可以安全地移动。
8.在上述自主移动系统中,所述物体可以是另一自主移动系统,并且在所述轿厢停在楼层之前或在所述轿厢的门打开之前,所述自主移动系统可以获取关于所述另一自主移动系统的目的地楼层的信息。通过该配置,能够抑制多个自主移动系统对人或物体的移动路线的阻挡。
9.根据实施例的自主移动系统包括:自主移动装置,其在包括电梯的设施中执行自主移动;以及服务器装置,其与所述自主移动装置交换行进信息,其中所述服务器装置基于进入所述电梯的轿厢的人或进入所述轿厢的物体来移动所述轿厢中的所述自主移动装置的等待位置。通过该配置,能够抑制对人或物体的移动路线的阻挡。
10.在上述自主移动系统中,所述服务器装置可以在所述轿厢停在楼层之前或在所述轿厢的门打开之前确定所述人或所述物体,并且可以在所述轿厢停在所述楼层之前或在所述轿厢的所述门打开之前移动所述自主移动装置的所述等待位置。通过该配置,能够缩短轿厢停在楼层的时间。
11.在上述自主移动系统中,在所述轿厢到达所述人或所述物体的目的地楼层之前所
述轿厢到达所述自主移动装置的目的地楼层的情况下,所述服务器装置可以使所述自主移动装置在所述人或所述物体进入所述轿厢的楼层暂先从所述轿厢下来,并且可以使所述自主移动装置在所述人或所述物体进入所述轿厢之后进入所述轿厢。通过该配置,能够抑制对人或物体的干扰,并且可以安全地移动。
12.在上述自主移动系统中,作为所述自主移动装置,可以存在包括第一自主移动装置和第二自主移动装置的多个自主移动装置,所述轿厢中的所述自主移动装置可以为所述第一自主移动装置,所述物体可以为所述第二自主移动装置,并且在所述轿厢停在楼层之前或在所述轿厢的门打开之前,所述服务器装置可以向所述第一自主移动装置发送关于所述第二自主移动装置的目的地楼层的信息。通过该配置,能够抑制多个自主移动系统对人或物体的移动路线的阻挡。
13.根据实施例的自主移动方法是用于在包括电梯的设施中执行自主移动的自主移动装置的自主移动方法,所述自主移动方法包括:在所述电梯的轿厢中确定进入所述轿厢的人或进入所述轿厢的物体的步骤;以及基于所述人或所述物体移动所述轿厢中的等待位置的步骤。通过该配置,能够抑制对人或物体的移动路线的阻挡。
14.根据实施例的存储有自主移动程序的存储介质是存储用于在包括电梯的设施中执行自主移动的自主移动装置的自主移动程序的存储介质,所述存储介质存储使计算机执行如下操作的所述自主移动程序:在所述电梯的轿厢中确定进入所述轿厢的人或进入所述轿厢的物体;以及基于所述人或所述物体移动所述轿厢中的等待位置。通过该配置,能够抑制对人或物体的移动路线的阻挡。
15.利用实施例,可以提供一种自主移动系统、自主移动方法和存储有自主移动程序的存储介质,其使得能够抑制对人或物体的移动路线的阻挡。
附图说明
16.下面将参照附图描述本发明的示例性实施例的特征、优点以及技术和工业意义,其中,相同的标号表示相同的元件,并且其中:
17.图1是例示根据实施例1的移动机器人的示意图;
18.图2是例示根据实施例1的移动机器人的立体图;
19.图3是例示根据实施例1的移动机器人的框图;
20.图4是例示根据实施例1的设施中的电梯的概念图;
21.图5是例示根据实施例1的包括电梯的设施中的移动机器人的移动方法的平面图;
22.图6是例示根据实施例1的包括电梯的设施中的移动机器人的移动方法的平面图;
23.图7是例示根据实施例1的包括电梯的设施中的移动机器人的移动方法的流程图;
24.图8是例示根据实施例2的服务器装置的框图;以及
25.图9是例示根据实施例2的自主移动系统的动作的序列图。
具体实施方式
26.下面将利用本发明的实施例描述本发明。根据权利要求书的本发明不限于下面描述的实施例。此外,不需要实施例中描述的所有配置作为解决问题的手段。为了清楚解释,在以下描述和附图中,适当时进行省略和简化。在附图中,相同的元件由相同的附图标记表
示,并根据需要省略重复的描述。
27.实施例1
28.将描述根据实施例1的自主移动系统。在该实施例中,自主移动系统可以由自主移动装置代替,并且自主移动装置可以由自主移动系统代替。此外,可以理解,本实施例中的自主移动系统包括自主移动装置。自主移动装置在预定设施中执行自主移动。例如,自主移动装置可以是执行自主移动的移动机器人,或者可以是执行自主移动以搬运物品的的搬运机器人。下面将移动机器人作为自主移动装置的示例进行描述。移动机器人将被分为移动机器人的配置和移动机器人的动作来进行描述。
29.移动机器人的配置
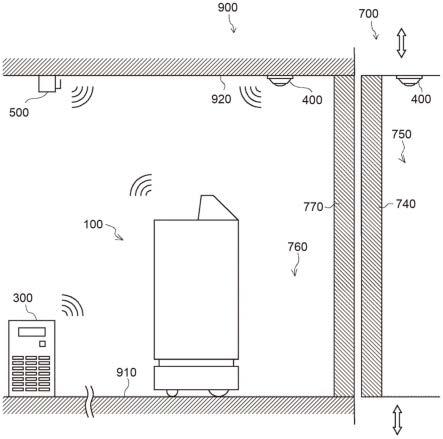
30.图1是例示根据实施例1的移动机器人的示意图。如图1所示,移动机器人100是在包括电梯700的设施900中执行自主移动的自主移动装置的示例。例如,设施900是医院。预定设施900不限于医院,并且可以是酒店、购物中心等,只要设施900包括电梯700并且移动机器人100可以在设施900中执行自主移动。
31.移动机器人100在设施900中的地板表面910上执行自主移动。设施相机400固定在设施900中。可以在设施900中设置多个设施相机400。例如,设施相机400固定在设施900的天花板920上,对设施相机400的周围进行拍摄,以生成图像数据。
32.设施相机400可以固定在电梯700的轿厢750停止的楼层的天花板920上,并且可以拍摄电梯厅760。电梯厅760布置在电梯门770附近。电梯门770与停在设置有电梯门770的楼层的轿厢750的门(称为轿厢门740)一起打开或关闭。设施相机400可以固定在电梯700的轿厢750的天花板920上,并且可以拍摄轿厢750的内部。轿厢750是容纳人或物体并且从与电梯厅760接触的位置上升或下降的箱形结构。
33.移动机器人100和设施相机400连接,以便通过诸如无线通信的信息传输手段彼此通信。例如,移动机器人100和设施相机400可以连接以便直接通信,或者可以连接以便通过接入点500和服务器装置300通信。因此,移动机器人100可以直接从设施相机400获取图像数据,或者可以通过接入点500和服务器装置300获取图像数据。
34.例如,接入点500是无线lan的接入点。接入点500固定在设施900中,并且从接入点500的周围的预定范围内的移动机器人100获取位置信息、行进信息等。在设施900中,可以设置多个接入点500。接入点500可以固定在电梯厅760的天花板920上,并且可以固定在电梯700的轿厢750的天花板920上。
35.在设施900中,多个移动机器人100可以执行自主移动。可以将多个移动机器人100连接,以便通过诸如无线通信的信息传输手段彼此通信。例如,可以将多个移动机器人100连接以便彼此直接通信,或者可以将其连接以便通过接入点500和服务器装置300彼此通信。
36.图2是例示根据实施例1的移动机器人100的立体图。图3是例示根据实施例1的移动机器人100的框图。如图2和图3所示,移动机器人100包括驱动单元110、壳体单元120、通信单元130、操作接受单元140、显示单元150、传感器组160、id传感器170、控制单元180和存储单元190。
37.如图2所示,移动机器人100是在作为移动表面的地板表面910上移动的移动体。这里,为了便于描述移动机器人100,使用xyz正交坐标轴系统。地板表面910在x-y平面上,并
且向上方向是+z轴方向。
38.驱动单元110用作移动机器人100的移动装置。驱动单元110包括与地板表面910接触的两个驱动轮111和与地板表面接触的脚轮112。两个驱动轮111被设定为彼此独立地围绕在与直行方向(图中的前后方向或x轴方向)正交的方向(图中的左右方向或y轴方向)上延伸的一个旋转轴旋转。移动机器人100通过以相同的旋转数驱动布置在右侧和左侧的驱动轮111来执行向前移动或向后移动,并且通过使右侧和左侧驱动轮111之间的旋转速度或旋转方向不同来执行转弯。驱动单元110响应于来自控制单元180的指令来驱动驱动轮111。
39.壳体单元120布置在移动机器人100中的驱动单元110的上方。壳体单元120可以包括容纳室门121。当容纳室门121打开时,在壳体单元120内设置有用于容纳预定物品的容纳室。也就是说,移动机器人100可以用作搬运预定物品的搬运机器人。壳体单元120可以响应于来自控制单元180的指令来打开或关闭容纳室门121。
40.如图3所示,通信单元130是用于与外部可通信连接的接口。例如,通信单元130包括天线、对要通过天线发送的信号执行调制或解调的电路等。通信单元130直接从设施相机400或通过接入点500和服务器装置300接收图像数据。
41.通信单元130可以与服务器装置300交换与目的地相关的信息、是否移动的信息、位置信息、行进信息、目的地楼层信息等。此外,通信单元130可以直接或通过接入点500和服务器装置300与另一移动机器人100交换位置信息、行进信息、图像数据、目的地楼层信息等。
42.通信单元130可以周期性地向服务器装置300发送心跳信号。心跳信号可以包括按时间顺序指示移动机器人100的状态的日志数据。此外,心跳信号可以包括移动机器人100的标识(id)和用户的id。
43.通信单元130与控制单元180连接。通信单元130将包括从设施相机400和服务器装置300发送的信息的信号输出到控制单元180,并将从控制单元180输出的信号发送到服务器装置300。
44.操作接受单元140接受来自用户的输入操作,并向控制单元180发送操作信号。作为用于接受来自用户的输入操作的装置,操作接受单元140可以包括例如叠加在显示单元150上的操作按钮或触摸面板。通过操作输入操作装置,用户打开或关闭电源,并打开或关闭容纳室门121。
45.例如,显示单元150设置在壳体单元120的上表面上,以便突出。例如,显示单元150是包括矩形液晶面板的显示单元。显示单元150响应于来自控制单元180的指令适当地显示信息。可以将接受来自用户的操作的触摸面板叠加在显示单元150上。
46.传感器组160包括获取移动机器人100的自主移动所需的数据的传感器。例如,传感器组160包括机器人相机161和距离传感器162。传感器组160可以包括除机器人相机161和距离传感器162之外的传感器。
47.例如,机器人相机161布置在显示单元150下方的壳体单元120的上部。作为机器人相机161,具有相同角场的两个相机单元可以被布置成水平远离彼此。由此,由各个相机单元拍摄的图像作为图像数据输出到控制单元180。
48.在移动机器人100位于电梯厅760的情况下,机器人相机161可以拍摄电梯厅760。在移动机器人100位于电梯700的轿厢750中的情况下,机器人相机161可以拍摄轿厢750的
内部。
49.例如,距离传感器162布置在壳体单元120的下部。距离传感器162可以布置在壳体单元120的+x轴方向侧表面、-x轴方向侧表面、+y轴方向侧表面和-y轴方向侧表面的各个下部。距离传感器162测量与移动机器人100周围的物体的距离。控制单元180分析由机器人相机161输出的图像数据和由距离传感器162输出的检测信号。由此,控制单元180识别移动机器人100周围的障碍物,并测量移动机器人100与障碍物之间的距离。
50.例如,id传感器170设置在显示单元150附近。id传感器170识别操作移动机器人100的用户的id,并检测用户拥有的id卡中包括的唯一标识符。例如,id传感器170包括用于读取无线标签中的信息的天线。用户将id卡靠近id传感器170,从而使移动机器人100识别作为操作者的用户的id。
51.控制单元180是包括诸如中央处理单元(cpu)的计算装置的信息处理装置。控制单元180包括控制单元180中的硬件和存储在硬件中的程序。也就是说,要由控制单元180执行的处理通过硬件和软件之一来实现。
52.控制单元180从各个组成部分获取各种信息,并根据所获取的信息向各个组成部分给出指令。例如,控制单元180根据从机器人相机161获取的图像数据、从距离传感器162获取的关于周围物体的信息等,检测移动机器人100与移动机器人100周围的物体之间的距离。然后,控制单元180根据检测到的距离、位置信息、行驶信息等计算到目的地的路线。控制单元180向驱动单元110给出用于沿着计算出的路线移动的指令。在执行该处理的情况下,控制单元180参考存储在存储单元190中的关于楼层地图的信息和目的地楼层信息。
53.此外,控制单元180可以基于从设施相机400或机器人相机161获取的图像数据,确定在电梯厅760中等待的移动机器人100、人、物体等,并且可以计算移动机器人100、人、物体等的数量。此外,控制单元180可以基于从设施相机400或机器人相机161获取的图像数据来确定电梯700的轿厢750中的移动机器人100、人、物体等,并且可以计算移动机器人100、人、物体等的数量。
54.存储单元190包括非易失性存储器,例如闪存和固态驱动器(ssd)。在存储单元190中,存储有用于移动机器人100的自主移动的设施的楼层地图。此外,在存储单元190中,存储有关于另一移动机器人100、人、物体等的目的地楼层信息。存储单元190与控制单元180连接,并且响应于来自控制单元180的请求,将存储的信息输出到控制单元180。
55.如图2所示,移动机器人100的前侧是其上安装机器人相机161的+x轴方向侧。对于移动机器人100的前侧的定义,可以采用各种概念。例如,可以基于如何布置用于识别周围环境的传感器组160来定义前侧。具体地,前侧被定义为其上布置有具有高识别能力的传感器或布置有许多传感器的壳体单元120的+x轴方向侧。当以这种方式定义前侧时,移动机器人100可以在更准确地识别周围环境的同时移动。对于本实施例中的移动机器人100,前侧被定义为其上布置有机器人相机161的+x轴方向侧。
56.可替代地,可以基于如何布置显示单元150来定义前侧。当显示单元150显示人物等的面部时,周围的人自然地识别出移动机器人100的前侧是显示单元150的一侧。因此,当前侧被定义为显示单元150的显示表面的一侧时,周围的人没有强烈的违和感。对于本实施例中的移动机器人100,前侧被定义为显示单元150的显示表面的一侧。
57.此外,可以基于移动机器人100的壳体形状定义前侧。例如,在壳体单元120的行进
表面上的投影形状是矩形的情况下,与前侧是较长侧时相比,当前侧是较短侧时,壳体单元120在移动时不干扰经过的人。也就是说,根据壳体形状,存在优选地在通常的移动时应为前侧的壳体表面。对于本实施例中的移动机器人100,前侧被定义为矩形的较短侧。如上所述,基于一些概念定义移动机器人100的前侧。可以考虑移动机器人的形状、作用等来决定定义前侧的概念。
58.移动机器人的动作
59.接下来,将描述实施例中的移动机器人的动作。例如,用户打开移动机器人100的电源。然后,用户向操作接受单元140输入期望的任务。当用户打开电源或当用户操作操作接受单元140时,根据需要由id传感器170识别用户的id。
60.为了搬运物品作为期望的任务,用户操作操作接受单元140,打开容纳室门121,并将物品放入容纳室。然后,用户操作操作接受单元140,并关闭容纳室门121。接下来,用户从操作接受单元140输入物品的搬运目的地。用户可以输入目的地楼层信息。移动机器人100的控制单元180使用存储在存储单元190中的楼层地图搜索到搬运目的地的路线。控制单元180可以导出目的地楼层信息。移动机器人100沿着搜索到的路线执行自主移动。
61.图4是例示根据实施例1的设施900中的电梯700的概念图。如图4所示,设施900包括电梯700。电梯700的轿厢750的上升和下降可以由设施900中设置的电梯控制单元780控制。
62.电梯控制单元780以可通信的方式与呼叫开关710和目的地开关720连接。呼叫开关710和目的地开关720可以以可通信的方式与移动机器人100和服务器装置300连接。
63.例如,呼叫开关710布置在轿厢750停止的各个楼层的电梯门770附近。呼叫开关710将电梯700的轿厢750呼叫到楼层。希望进入轿厢750的人打开呼叫开关710。然后,电梯控制单元780使轿厢750上升或下降到呼叫开关710打开的楼层,并在该楼层停止。
64.目的地开关720布置在轿厢750中。目的地开关720允许选择轿厢750的目的地楼层。人进入轿厢750,并通过目的地开关720选择目的地楼层。然后,电梯控制单元780使轿厢750上升或下降到通过目的地开关720选择的目的地楼层,并在该楼层停止。
65.在进入轿厢750的人和物体的总重量等于或大于预定重量的情况下,电梯控制单元780可以输出超重的显示,并且可以在任何其他人或物体进入轿厢750时鸣响蜂鸣器。此外,在总重量等于或大于预定重量的情况下,电梯控制单元780仅在通过目的地开关720选择的楼层停止轿厢750,使得任何其他人或物体不会进入轿厢750。这样,设施900中设置的电梯控制单元780控制电梯700的升降和停止。
66.电梯控制单元780可以直接或通过服务器装置300和接入点500以可通信的方式与移动机器人100连接。服务器装置300可以控制电梯控制单元780的一些功能。此外,服务器装置300可以具有电梯控制单元780的一些功能。例如,服务器装置300可以使轿厢750上升或下降到呼叫开关710打开的楼层,并在该楼层停止,或者可以使轿厢750上升或下降到通过目的地开关720选择的楼层,并在该楼层停止。这样,服务器装置300可以控制轿厢750的上升和下降。
67.移动机器人100可以在电梯700的轿厢750中具有用于等待的固定位置。例如,移动机器人100可以采用轿厢750中的预定位置作为固定位置。例如,移动机器人100可以采用轿厢750的后部作为固定位置,使得许多人和物体可以进入轿厢750。此外,移动机器人100可
以采用面向目的地开关720的位置作为固定位置,使得在目的地开关720附近提供空间,并且已经进入轿厢750的人可以操作目的地开关720。此外,移动机器人100可以采用轿厢门740附近的位置作为固定位置,使得移动机器人100可以在到达目的地楼层之后立即从轿厢750下来。
68.这样,移动机器人100可以采用轿厢750中的固定位置作为等待位置。当轿厢750变得靠近移动机器人100从轿厢750下来的楼层时,移动机器人100可以靠近轿厢门740。例如,在移动机器人100在作为固定位置的轿厢750的后部等待的情况下,当轿厢750变得靠近移动机器人100从轿厢750下来的楼层时,移动机器人100可以移动到轿厢门740的前面。由此,移动机器人100可以在到达目的地楼层之后立即从轿厢750下来。
69.移动机器人100可以基于进入轿厢750的人的种类、人数、进入轿厢750的物体的种类和物体的数量,从轿厢750中的固定位置改变等待位置。
70.图5是例示包括根据实施例1的电梯700的设施900中的移动机器人100的移动方法的平面图。如图5所示,在电梯700的轿厢750a中,移动机器人100a基于进入轿厢750的人610移动轿厢750a中的等待位置。在统指移动机器人100的情况下,移动机器人100被称为移动机器人100,而在指示特定移动机器人100的情况下,移动机器人100被称为移动机器人100a,“a”等被放入其中。轿厢750也是如此。
71.例如,移动机器人100a在作为固定位置的轿厢门740的后面等待。在进入轿厢750的人610是老人、患者等并且在轿厢750中使用扶手的情况下,移动机器人100a将等待位置从扶手附近移动到轿厢门740的前面。此外,在进入轿厢750a的人610是老人、患者等的情况下,移动机器人100a可以移动等待位置,使得与老人、患者等保持距离,以防止老人、患者等踉跄和绊倒。
72.采用轿厢门740的前面作为等待位置的移动机器人100a可以移动等待位置,并且可以在目的地开关720的前面提供空间,使得进入轿厢750a的人610可以按下目的地开关720。此外,在进入轿厢750a的人610通过目的地开关720选择的目的地楼层是轿厢750a在移动机器人100a的目的地楼层之后到达的楼层的情况下,移动机器人100a将等待位置移动到轿厢门740的前面。
73.在电梯700的轿厢750b中,移动机器人100b、100c基于进入轿厢750b的物体620移动轿厢750b中的等待位置。例如,在进入轿厢750b的物体620是担架的情况下,移动机器人100b、100c移动等待位置,以便沿着担架延伸的方向排列。具体地,在担架布置在轿厢750b中以便在图中的x轴方向(即从轿厢门740向后的方向)上延伸的情况下,移动机器人100b、100c移动等待位置以便沿着x轴方向排列。此外,在进入轿厢750b的人610是坐轮椅的人610和推轮椅的人610的情况下,移动机器人100b、100c移动以便沿着轮椅的前后方向排列。
74.图6是例示根据实施例1的包括电梯700的设施900中的移动机器人100的移动方法的平面图。如图6所示,移动机器人100可以在轿厢750停在楼层之前或在轿厢门740打开之前确定进入轿厢750的人610或物体620。
75.例如,移动机器人100可以从拍摄电梯厅760的设施相机400的图像数据中获取关于进入轿厢750的人610或物体620的图像数据。由此,移动机器人100可以获得关于在轿厢750将停止的楼层上等待轿厢750的人610或物体620的信息。因此,移动机器人100可以在轿厢750停在楼层之前或在轿厢门740打开之前确定进入轿厢750的人610或物体620。
76.即使在人610或物体620进入轿厢750之后,移动机器人100也可以判定移动机器人100是否可以在相同的等待位置等待。在移动机器人100判定移动机器人100可以在相同的等待位置等待的情况下,移动机器人100在相同的等待位置等待而没有变化。另一方面,在移动机器人100判定移动机器人100不能在相同的位置等待的情况下,移动机器人100移动等待位置。
77.例如,在轿厢门740的后面等待的移动机器人100a获取关于电梯厅760的图像数据。然后,移动机器人100a确定进入轿厢750a的人610是老人、患者等。在这种情况下,移动机器人100a确定移动机器人100a不能在设置扶手的轿厢门740的后面等待。
78.当移动机器人100a确定进入轿厢750的人610或物体620时,移动机器人100a可以使用拍摄电梯厅760的另一移动机器人100的图像数据,而不是电梯厅760中的设施相机400的图像数据。
79.在移动机器人100判定当人610或物体620进入轿厢750时移动机器人100不能在相同的等待位置等待的情况下,移动机器人100可以在轿厢750停在楼层之前或在轿厢门740打开之前移动等待位置。由此,可以缩短轿厢750停在楼层的时间。
80.移动机器人100可以获取关于在电梯厅760中等待轿厢750到达的人610或物体620(即,将进入轿厢750的人610或物体620)的目的地楼层的信息。
81.例如,在进入轿厢750a的物体620是另一移动机器人100d的情况下,轿厢750a中的移动机器人100a可以直接或通过服务器装置300获取关于移动机器人100d的目的地楼层的信息。因此,移动机器人100a在轿厢750停在楼层之前或轿厢门740打开之前获取关于移动机器人100d的目的地楼层的信息。
82.例如,在进入轿厢750b的物体620是朝向医院中的重症监护病房的担架的情况下,轿厢750b中的移动机器人100b可以从存储单元190或服务器装置300获取关于担架的目的地楼层的信息。例如,在进入轿厢750b的物体620是容纳废物的容器的情况下,轿厢750b中的移动机器人100b可以从存储单元190或服务器装置300获取关于容器的目的地楼层的信息。例如,在进入轿厢750a的人610是使用医院中的特定病房的患者的情况下,轿厢750a中的移动机器人100a可以从存储单元190或服务器装置300获取关于患者的目的地楼层的信息。关于重症监护病房、废物收集场所和特定病房的楼层信息预先存储在存储单元190和服务器装置300中。此外,预定的人610或预定的物体620和楼层信息可以预先彼此关联,并且可以存储在存储单元190和服务器装置300中。
83.在轿厢750到达人610或物体620的目的地楼层之前,轿厢750可以到达移动机器人100的目的地楼层。在这种情况下,移动机器人100比稍后将进入轿厢750的人610或物体620更早从轿厢750下来。因此,优选移动机器人100的等待位置比人610或物体620的位置更靠近轿厢门740。
84.因此,在轿厢750到达人610或物体620的目的地楼层之前轿厢750到达移动机器人100的目的地楼层的情况下,移动机器人100在人610或物体620进入轿厢750的楼层暂先从轿厢750下来,并且在人610或物体620进入轿厢750之后进入轿厢750。由此,移动机器人100可以在到达目的地楼层之后立即从轿厢750下来。
85.将参照流程图描述移动机器人100在设施900中的移动动作。图7是例示根据实施例1的包括电梯700的设施900中的移动机器人100的移动方法的流程图。
86.如图7的步骤s101所示,移动机器人100确定进入电梯700的轿厢750的人610或物体620。例如,移动机器人100可以基于由传感器组160检测到的信息(具体地,机器人相机161的图像数据)确定进入轿厢750的人610或物体620。此外,移动机器人100可以基于电梯厅760中的设施相机400的图像数据来确定进入轿厢750的人610或物体620。
87.在步骤s101中,移动机器人100可以在轿厢750停在楼层之前或在轿厢门740打开之前确定人610或物体620。此外,在步骤s101中,移动机器人100可以确定人610或物体620的目的地楼层和移动机器人100的目的地楼层中较早的一个。
88.接下来,如步骤s102所示,移动机器人100基于进入电梯700的轿厢750的人610或物体620移动等待位置。
89.在步骤s102中,移动机器人100可以在轿厢750停在楼层之前或在轿厢门740打开之前移动等待位置。此外,在步骤s102中,在移动机器人100的目的地楼层更早的情况下,即,在轿厢750到达人610或物体620的目的地楼层之前,轿厢750更早到达移动机器人100的目的地楼层的情况下,移动机器人100可以在人610或物体620进入轿厢750的楼层暂先从轿厢750下来,并且可以在人610或物体620进入轿厢750之后进入轿厢750。
90.接下来,将描述实施例的效果。本实施例中的移动机器人100基于进入电梯700的轿厢750的人610或物体620移动轿厢750中的等待位置。因此,移动机器人100可以基于进入轿厢750的人610或物体620的种类在最佳位置等待,因此,能够抑制对人610或物体620的移动路线的阻挡。
91.此外,在轿厢750停在楼层之前或在轿厢门740打开之前,移动机器人100确定人610或物体620并移动等待位置。因此,能够缩短轿厢门740打开之后以及人610或物体620进入轿厢750之前的时间,并且缩短轿厢750停在楼层的时间。
92.此外,在轿厢750到达人610或物体620的目的地楼层之前轿厢750到达移动机器人100的目的地楼层的情况下,移动机器人100在人610或物体620进入轿厢750的楼层暂先从轿厢750下来,并且可以在人610或物体620进入轿厢750之后进入轿厢750。因此,能够抑制对人610或物体620的干扰,并且能够安全地移动。
93.物体620可以是另一移动机器人100,并且移动机器人100可以在轿厢750停在楼层之前或在轿厢门740打开之前,获取关于另一移动机器人100的目的地楼层的信息。由此,即使当多个移动机器人100进入轿厢750时,也能够抑制对人610或物体620的移动路线的阻挡。
94.实施例2
95.接下来,将描述根据实施例2的自主移动系统。本实施例中的自主移动系统是控制在包括电梯700的设施900中执行自主移动的自主移动装置的系统。自主移动系统将被分为自主移动系统的配置和自主移动系统的动作来描述。
96.自主移动系统的配置
97.自主移动系统包括移动机器人100。自主移动系统可以包括多个移动机器人100。此外,除了移动机器人100之外,自主移动系统还可以包括服务器装置300。
98.移动机器人
99.本实施例中的移动机器人100的配置与上述实施例1中的配置相同。本实施例中的移动机器人100可以使服务器装置300执行实施例1中的移动机器人100的一些功能。
100.例如,进入轿厢750的人610或物体620的确定可以由服务器装置300执行。在那种情况下,可以在轿厢750停在楼层之前或在轿厢门740打开之前执行人610或物体620的确定。此外,关于进入轿厢750的人610或物体620的目的地楼层信息可以由服务器装置300获取。此外,移动机器人100在轿厢750中的等待位置可以由服务器装置300导出。
101.服务器装置
102.例如,服务器装置300是具有通信功能的计算机。服务器装置300可以安装在任意位置,只要服务器装置300可以与自主移动系统的组成部分通信即可。服务器装置300与移动机器人100交换行进信息。此外,服务器装置300可以通过控制电梯控制单元780或代替电梯控制单元780来控制电梯700的轿厢750的上升和下降。
103.图8是例示根据实施例2的服务器装置的框图。如图8所示,服务器装置300包括通信单元330、控制单元380和存储单元390。
104.通信单元330单独与移动机器人100通信。通信单元330将从组成部分接收到的信号输出到控制单元380。此外,通信单元330在适当时将从控制单元380输出的信号发送到组成部分。通信单元330可以包括用于与服务器装置300和多个组成部分通信的路由器装置。通信单元330可以包括分别对应于组成元件的多个不同的通信装置,以便与服务器装置300和多个组成部分通信。通信单元330可以通过内部网或互联网线路以可通信的方式与组成部分连接。
105.控制单元380由诸如cpu的计算装置构成,并执行各种信息处理。控制单元380可以基于关于电梯厅760的图像数据来确定进入轿厢750的人610或物体620。此外,控制单元380可以获取关于进入轿厢750的人610或物体620的目的地楼层信息。此外,控制单元380可以导出移动机器人100在轿厢750中的等待位置。
106.存储单元390包括诸如闪存和ssd的非易失性存储器。在存储单元390中,存储有用于移动机器人100的自主移动的设施的楼层地图。此外,关于人610或物体620的目的地楼层信息可以存储在存储单元390中。存储单元390与控制单元380连接,并且响应于来自控制单元380的请求,将存储的信息输出到控制单元380。
107.自主移动系统的动作
108.接下来,将描述自主移动系统的动作。图9是例示根据实施例2的自主移动系统的动作的序列图。
109.如图9的步骤s201所示,服务器装置300可以向轿厢750中的移动机器人100请求关于电梯700的轿厢750的内部的图像数据。响应于该请求,如步骤s202所示,轿厢750中的移动机器人100将由机器人相机161拍摄的关于轿厢750的内部的图像数据发送到服务器装置300。服务器装置300接收图像数据。
110.此外,如步骤s203所示,服务器装置300可以向电梯700的轿厢750中的设施相机400请求关于轿厢750的内部的图像数据。响应于该请求,如步骤s204所示,轿厢750中的设施相机400向服务器装置300发送关于轿厢750的内部的图像数据。服务器装置300接收图像数据。通过步骤s201至s204,服务器装置300获取移动机器人100在轿厢750中的等待位置。
111.此外,如步骤s205所示,服务器装置300向电梯厅760中的设施相机400请求关于电梯厅760的图像数据。响应于该请求,如步骤s206所示,电梯厅760中的设施相机400将关于电梯厅760的图像数据发送到服务器装置300。服务器装置300接收图像数据。通过步骤s205
至s206,服务器装置300获取关于进入轿厢750的人610或物体620的图像数据。
112.接下来,如步骤s207所示,服务器装置300确定进入电梯700的轿厢750的人610或物体620。此外,如步骤s208所示,服务器装置300可以获取关于进入轿厢750的人610或物体620的目的地楼层的信息。
113.接下来,如步骤s209所示,服务器装置300根据确定结果和关于进入轿厢750的人610或物体620的目的地楼层信息来导出移动机器人100在轿厢750中的等待位置。
114.接下来,如步骤s210所示,服务器装置300将等待位置发送给轿厢750中的移动机器人100。轿厢750中的移动机器人100接收等待位置。由此,如步骤s211所示,轿厢750中的移动机器人100移动等待位置。
115.利用本实施例,服务器装置300可以基于进入电梯700的轿厢750的人或进入轿厢750的物体620移动移动机器人100在轿厢750中的等待位置。因此,能够抑制对人610或物体620的移动路线的阻挡。
116.此外,服务器装置300可以承担移动机器人100的一些功能。因此,能够减轻移动机器人100的负担,并提高移动机器人100的处理速度。此外,服务器装置300可以整体地控制多个移动机器人100的动作。因此,能够协调移动机器人100的动作,并提高系统的整体移动效率。其他配置、动作和效果包括在实施例1的描述中。
117.本发明不限于上述实施例,并且可以在不脱离其主旨的情况下适当地进行修改。例如,实施例1和实施例2中的组成部分的组合包括在本发明的技术思想的范围内。此外,下面描述的自主移动方法和自主移动程序包括在本发明的技术思想的范围内。
118.(补充1)
119.一种自主移动方法,其用于在包括电梯的设施中执行自主移动的自主移动装置,所述自主移动方法包括:
120.在所述电梯的轿厢中确定进入所述轿厢的人或进入所述轿厢的物体的步骤;以及
121.基于所述人或所述物体移动所述轿厢中的等待位置的步骤。
122.(补充2)
123.根据补充1所述的自主移动方法,其中:
124.在确定所述人或所述物体的所述步骤中,在所述轿厢停在楼层之前或在所述轿厢的门打开之前确定所述人或所述物体;并且
125.在移动所述轿厢中的所述等待位置的所述步骤中,在所述轿厢停在所述楼层之前或在所述轿厢的所述门打开之前移动所述等待位置。
126.(补充3)
127.根据补充1或2所述的自主移动方法,其中:
128.在确定所述人或所述物体的所述步骤中,判定在所述轿厢到达所述人或所述物体的目的地楼层之前所述轿厢是否到达所述自主移动系统的目的地楼层;并且
129.在移动所述轿厢中的所述等待位置的所述步骤中,所述自主移动系统在所述人或所述物体进入所述轿厢的楼层暂先从所述轿厢下来,并且在所述人或所述物体进入所述轿厢之后进入所述轿厢。
130.(补充4)
131.根据补充1至3中任一项所述的自主移动方法,其中:
132.所述物体是另一自主移动装置;并且
133.在确定所述人或所述物体的所述步骤中,在所述轿厢停在楼层之前或在所述轿厢的门打开之前,获取关于所述另一自主移动装置的目的地楼层的信息。
134.(补充5)
135.一种用于在包括电梯的设施中执行自主移动的自主移动装置的自主移动程序,所述自主移动程序使计算机执行:
136.在所述电梯的轿厢中确定进入所述轿厢的人或进入所述轿厢的物体;以及
137.基于所述人或所述物体移动所述轿厢中的等待位置。
138.(补充6)
139.根据补充5所述的自主移动程序,其中:
140.在确定所述人或所述物体时,所述计算机在所述轿厢停在楼层之前或在所述轿厢的门打开之前确定所述人或所述物体;并且
141.在移动所述轿厢中的所述等待位置时,所述计算机在所述轿厢停在所述楼层之前或在所述轿厢的所述门打开之前移动所述等待位置。
142.(补充7)
143.根据补充5或6所述的自主移动程序,其中:
144.在确定所述人或所述物体时,所述计算机在所述轿厢到达所述人或所述物体的目的地楼层之前判定所述轿厢是否到达所述自主移动装置的目的地楼层;并且
145.在移动所述轿厢中的所述等待位置时,所述计算机使所述自主移动装置在所述人或所述物体进入所述轿厢的楼层暂先从所述轿厢下来,并且使所述自主移动装置在所述人或所述物体进入所述轿厢之后进入所述轿厢。
146.(补充8)
147.根据补充5至7中任一项所述的自主移动程序,其中:
148.所述物体是另一自主移动装置;并且
149.在确定所述人或所述物体时,在所述轿厢停在楼层之前或在所述轿厢的门打开之前,所述计算机获取关于所述另一自主移动装置的目的地楼层的信息。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1