一种皮带机用滚筒自适应除水装置
1.本发明涉及物料输送设备领域,具体涉及为一种皮带机用滚筒自适应除水装置。
背景技术:
2.输送带输送物料时有时会进行喷水降尘工作,尤其是在运输过程中有一定高度落差时,若不进行及时的喷水降尘,那么大量的粉尘将会从输送带末端抛出,从而污染环境,并对工人的身体造成一定损伤。
3.然而当物料运输到指定区域后,输送带表面还会有残留的灰水结合物,若不及时清扫,将会进入托辊等部件,使得带式输送机的表面摩擦力减小,造成整段截面皮带拉力不均匀,使得输送带零部件受力不均匀而加速磨损导致整台机器寿命下降,严重时可能使得皮带跑偏,极易拉坏皮带,影响安全生产。
技术实现要素:
4.为了解决背景技术当中的所存在的回程段皮带粘附有灰水不便于清理等现象要求,本发明提出了,一种皮带机用滚筒自适应除水装置。
5.为了达到上述目的,本发明提出的技术方案为:一种皮带机用滚筒自适应除水装置由支架组(1)、滚筒轴承(2)、滚筒轴(3)、测距模块(4)、自适应压紧装置(5)、网状滚筒(6)、输送带(7)、改向滚筒(8)、气路(9)、控制器(10)组成。
6.支架组(1)位于整个皮带机的下方,支架组(1)位于输送带改向滚筒的回程段,支架组(1)由左支架(1-1),右支架(1-2),左支架轴(1-3),右支架轴(1-4)以及四个侧边轴承(1-5)组成,左支架(1-1)的上方安装有左支架轴(1-2),且左支架轴(1-2)上安装有两个侧边轴承(1-5),右支架(1-2)上方安装有右支架轴(1-4),且右支架轴(1-4)上安装有两个侧边轴承(1-5)。
7.滚筒轴承(2)安装在滚筒轴(3)两侧,用于固定滚筒轴(3),滚筒轴承(2)的外圈开有凹槽用来卡入前张紧皮带(5-4),后张紧皮带(5-5)。
8.网状滚筒(6)由辐板(6-1),筒皮(6-2),棉麻网(6-3)构成,其中,棉麻网(6-3)与输送机的输送带(7)相接触进行吸水刮水,滚筒轴(3)位于网状滚筒(6)的轴心,其中,棉麻网(6-3)由多孔纤维材料制成。
9.测距模块由左传感器固定架(4-1),左激光位移传感器(4-2),右传感器固定架(4-3),右激光位移传感器(4-4),光电传感器(4-5)组成,其中左传感器固定架(4-1)安装在左支架(1-1)的中段横梁部分,右传感器固定架(4-3)安装在右支架(1-2)的中段横梁部分,左激光位移传感器(4-2)安装在左传感器固定架(4-1)上且感应方向朝上右激光位移传感器(4-4)安装右传感器固定架(4-3)上且感应方向朝上。
10.左侧支架的前上部安装有光电传感器(4-5)且感应方向朝向网状滚筒(6)。
11.自适应压紧装置(5)由预紧夹(5-1),前伺服电机(5-2),后伺服电机(5-3),前张紧
皮带(5-4),后张紧皮带(5-5),前张紧力传感器(5-6),后张紧力传感器(5-7)组成。
12.其中前张紧皮带(5-4)的左侧使用螺栓固定于左支架(1-1)的中前部,并从左侧绕过左支架轴(1-3),右支架轴(1-4)后与前张紧力传感器(5-6)相连后张紧皮带(5-5)的左侧使用螺栓固定于左支架(1-1)的中后部。并从左侧绕过左支架轴(1-3), 右支架轴(1-4)后与后张紧力传感器(5-7)相连。
13.前张紧力传感器(5-6)的下侧与前补偿皮带(5-8)由螺栓固连,前补偿皮带(5-8)的下侧与前预紧夹(5-1-a)相连且由螺栓固定后张紧力传感器(5-7)的下侧与后补偿皮带(5-9)由螺栓固连,后补偿皮带(5-9)的下侧与后预紧夹(5-1-b)相连且由螺栓固定。
14.前伺服电机(5-2)由螺栓固连在右支架(1-2)的前表面,且前伺服电机(5-2)的转轴插在前预紧夹(5-1-a)中并由螺栓锁紧后伺服电机(5-3)由螺栓固连在右支架(1-2)的后表面,且后伺服电机(5-3)的转轴插在后预紧夹(5-1-b)中并由螺栓锁紧。
15.气路(9)由喷嘴(9-1),气管(9-2),压力传感器(9-3),电磁调压阀(9-4)以及气源(9-5)构成,其中喷嘴(9-1)由气管(9-2)连接到电磁调压阀(9-4)和压力传感器(9-3),电磁调压阀(9-4)由气管(9-2)连接到气源(9-5)。
16.控制器(10)检测左激光位移传感器(4-2),右激光位移传感器(4-4),光电传感器(4-5),前张紧力传感器(5-6),后张紧力传感器(5-7)以及压力传感器(9-3)的数据,并且控制前伺服电机(5-2),后伺服电机(5-3)和电磁调压阀(9-4)。
17.具体控制过程如下:首先控制器(10)进行初始化上电,然后实时采集前张紧力传感器(5-6)、后张紧力传感器(5-7)、左激光位移传感器(4-2)、右激光位移传感器(4-4)、光电传感器(4-5)、压力传感器(9-3)的数值;同时控制器(10)控制前伺服电机(5-2)和后伺服电机(5-3)。
18.控制前伺服电机(5-2)放松前张紧皮带(5-4),让前张紧力传感器(5-6)的数值达到最小;控制后伺服电机(5-3)放松后张紧皮带(5-5),让后张紧力传感器(5-7)的数值达到最小;以达到网状滚筒(6)与输送带(7)完全脱离。
19.然后读取左激光位移传感器(4-2)的距离变量记为h1,右激光位移传感器(4-4)的距离变量记为h2,用式(1)估算出输送带(7)下表面与网状滚筒(6)的轴心垂面的交线,该交线与左激光位移传感器(4-2)和右激光位移传感器(4-4)的连线的垂直高度h
*
。
20.ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)忽略网状滚筒(6)运行时的振动,则理想状态下网状滚筒(6)运行时,网状滚筒(6)的轴心距左支架轴(1-3)和右支架轴(1-4)的轴心形成的平面的距离h,可由式(2)算出。
21.ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)其中d为网状滚筒(6)的外圆直径;h0为右激光位移传感器(4-4)与左支架轴(1-3)和右支架轴(1-4)的轴心形成的平面的距离。
22.假设网状滚筒(6)在支架组(1)的中心对称面内上下运动,则网状滚筒(6)的轴心到左支架轴(1-3)或右支架轴(1-4)的轴心垂面处的水平方向距离相等,设为v;则对滚筒轴(3)的轴线在正视图剖面进行受力分析时, 前张紧皮带(5-4)与滚筒轴(3)的重力方向的夹角为θ,其中可由式(3)算出。
23.ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)假设网状滚筒(6)与滚筒轴承(2)滚筒轴(3)的总质量为,重力加速度为g,所需网状滚筒(6)对输送带(7)的压应力为n,则可求得皮带上所需要施加的张紧力fn,由式(4)求得:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)由式(3)和式(4)可得:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)由此,可控制器(10)调节前伺服电机(5-2)与后伺服电机(5-3),将前张紧力传感器(5-6)与后张紧力传感器(5-7)的数值调整fn,即可保证在一定范围内网状滚筒(6)可以压紧输送带(7),其压应力为n,从而进行自适应调节。
24.在机器运行当中光电传感器(4-5)可以实时采集到网状滚筒(6)的转速,并反馈给控制器(10), 控制器(10)按照光电传感器(4-5)给出的转速信号控制电磁调压阀(9-4)的输出,以达到当网状滚筒(6)运行速度快时,喷嘴喷出的气压高气流量大, 当网状滚筒(6)运行速度慢时,喷嘴喷出的气压低气流量小,更有利于节省供气并达到一定烘干效果。
25.压力传感器(9-3)接入控制器(10),并实时反馈气管(9-2)的压力,让整个气压烘干系统成为闭环控制。
26.综上所述,本发明把一种皮带机用滚筒自适应除水装置安装在运输带的下方,依靠各种传感器采集并实时反馈信息,让此装置具有滚动除水,压紧力可调, 可调气压喷干,棉麻网可更换等功能,保证在经济实用的条件下发挥网状滚筒除水喷干的优势。
附图说明
27.为了更清楚的说明本发明实施的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
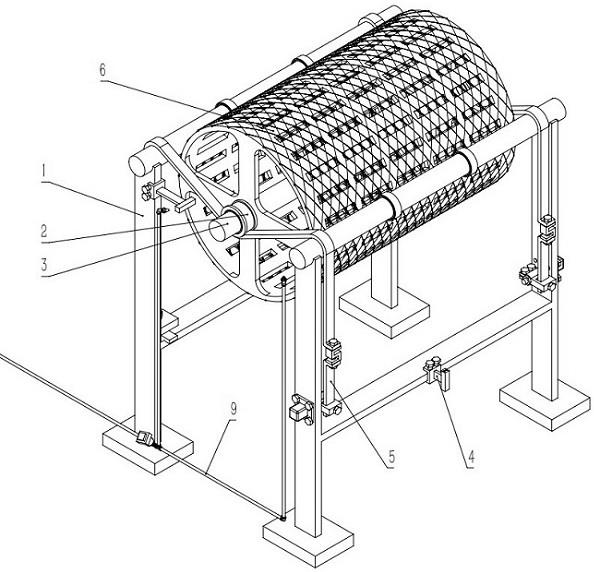
28.图1为本发明去除了输送带(7),改向滚筒(8)的前侧立体结构示意图;图2为本发明的正视图;图3为本发明去除了网状滚筒(6),输送带(7),改向滚筒(8)后的结构示意图;图4为本发明去除了支架组(1),测距模块(4),网状滚筒(6),输送带(7),改向滚筒(8), 气路(9),后的结构示意图;图5为本发明的网状滚筒(6)的结构示意图;图6为本发明的气路(9)的结构示意图;图7,图8为本发明的理论计算附图;
图9为本发明的控制器(10)信号传输流图;图中,1.支架组,1-1左支架,1-2右支架,1-3左支架轴,1-4右支架轴,1-5侧边轴承,2滚筒轴承,3滚筒轴,4测距模块,4-1左传感器固定架,4-2左激光位移传感器,4-3右传感器固定架,4-4右激光位移传感器,4-5光电传感器,5自适应压紧装置,5-1-a前预紧夹, 5-1-b后预紧夹,5-2前伺服电机,5-3后伺服电机,5-4前张紧皮带,5-5后张紧皮带,5-6前张紧力传感器,5-7后张紧力传感器,5-8前补偿皮带,5-9后补偿皮带,6网状滚筒,6-1辐板,6-2筒皮,6-3棉麻网,7输送带,8改向滚筒,9气路,9-1喷嘴,9-2气管,9-3压力传感器,9-4电磁调压阀,9-5气源。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚,完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.实施例1:如图1所示,一种皮带机用滚筒自适应除水装置由支架组(1)、滚筒轴承(2)、滚筒轴(3)、测距模块(4)、自适应压紧装置(5)、网状滚筒(6)、气路(9)组成。
31.如图2所示, 输送带(7)与网状滚筒(6)相接触并带动网状滚筒(6)滚动进行除水。其中左激光位移传感器(4-2)安装在左传感器固定架(4-1)上且感应方向朝上,右激光位移传感器(4-4)安装右传感器固定架(4-3)上且感应方向朝上。
32.如图3所示,为支架组(1),滚筒轴承(2),滚筒轴(3),测距模块(4)的示意图,支架组(1)由左支架(1-1)、右支架(1-2)、左支架轴(1-3)、右支架轴(1-4)以及四个侧边轴承(1-5)组成。
33.左支架(1-1)的上方安装有左支架轴(1-2),且左支架轴(1-2)上安装有两个侧边轴承(1-5);右支架(1-2)上方安装有右支架轴(1-4),且右支架轴(1-4)上安装有两个侧边轴承(1-5)。
34.滚筒轴承(2)安装在滚筒轴(3)两侧,用于固定滚筒轴(3), 滚筒轴承(2)的外圈开有凹槽,用来卡入前张紧皮带(5-4)和后张紧皮带(5-5)。
35.左传感器固定架(4-1)安装在左支架(1-1)的中段横梁部分,右传感器固定架(4-3)安装在右支架(1-2)的中段横梁部分, 左侧支架的前上部安装有光电传感器(4-5)且感应方向朝向网状滚筒(6)。
36.如图4所示,为自适应压紧装置(5),自适应压紧装置(5)由预紧夹(5-1),前伺服电机(5-2),后伺服电机(5-3),前张紧皮带(5-4),后张紧皮带(5-5),前张紧力传感器(5-6),后张紧力传感器(5-7)组成。
37.其中前张紧皮带(5-4)的左侧使用螺栓固定于左支架(1-1)的中前部,并从左侧绕过左支架轴(1-3)、右支架轴(1-4)后,与前张紧力传感器(5-6)的上部相连。
38.后张紧皮带(5-5)的左侧使用螺栓固定于左支架(1-1)的中后部,并从左侧绕过左支架轴(1-3)、右支架轴(1-4)后,与后张紧力传感器(5-7)的上部相连。
39.前张紧力传感器(5-6)的下侧与前补偿皮带(5-8)由螺栓固连,前补偿皮带(5-8)
的下侧与前预紧夹(5-1-a)相连且由螺栓固定。
40.后张紧力传感器(5-7)的下侧与后补偿皮带(5-9)由螺栓固连,后补偿皮带(5-9)的下侧与后预紧夹(5-1-b)相连且由螺栓固定。
41.前伺服电机(5-2)由螺栓固连在右支架(1-2)的前表面,且前伺服电机(5-2)的转轴插在前预紧夹(5-1-a)中并由螺栓锁紧;后伺服电机(5-3)由螺栓固连在右支架(1-2)的后表面,且后伺服电机(5-3)的转轴插在后预紧夹(5-1-b)中并由螺栓锁紧。
42.如图5所示,为网状滚筒(6),网状滚筒(6)由辐板(6-1),筒皮(6-2),棉麻网(6-3)构成,其中,棉麻网(6-3)与输送机的输送带(7)相接触,进行吸水刮水,滚筒轴(3)位于网状滚筒(6)的轴心,其中,棉麻网(6-3)由多孔纤维材料制成。
43.如图6所示,为气路(9),气路(9)由喷嘴(9-1),气管(9-2),压力传感器(9-3),电磁调压阀(9-4)以及气源(9-5)构成。其中喷嘴(9-1)由气管(9-2)连接到电磁调压阀(9-4)和压力传感器(9-3),电磁调压阀(9-4)由气管(9-2)连接到气源(9-5)。
44.如图7和8所示,为计算偏角θ和应施加应力的几何计算图,其中:为右激光位移传感器(4-4)与左支架轴(1-3)和右支架轴(1-4)的轴心形成的平面的距离,为左激光位移传感器(4-2)的距离变量,为右激光位移传感器(4-4)的距离变量,为输送带(7)下表面与网状滚筒(6)的轴心垂面的交线与左激光位移传感器(4-2)和右激光位移传感器(4-4)的连线的垂直高度,为网状滚筒(6)的轴心距左支架轴(1-3)和右支架轴(1-4)的轴心形成的平面的距离。
45.为网状滚筒(6)直径,为滚筒轴承(2)的外径,为右支架轴(1-4)的直径,为网状滚筒(6)的轴心到左支架轴(1-3)或右支架轴(1-4)的轴心垂面处的水平方向距离。
46.如图9所示,为控制器(10)的信号传输流图,其中箭头的方向代表了信息的流向。控制器(10)采集左激光位移传感器(4-2),右激光位移传感器(4-4),前张紧力传感器(5-6),后张紧力传感器(5-7)的信号,以此来保证网状滚筒(6)可以压紧输送带(7),从而进行自适应调节。
47.并且控制器(10)在机器运行当中光电传感器(4-5)可以实时采集到网状滚筒(6)的转速,并反馈给控制器(10), 控制器(10)按照光电传感器(4-5)给出的转速信号控制电磁调压阀(9-4)的输出,以达到当网状滚筒(6)运行速度快时,喷嘴喷出的气压高气流量大,当网状滚筒(6)运行速度慢时,喷嘴喷出的气压低气流量小,更有利于节省供气并达到一定烘干效果。
48.压力传感器(9-3)接入控制器(10),并实时反馈气管(9-2)的压力,让整个气压烘干系统成为闭环控制。
49.具体控制流程如下: 1.机器上电时先进行复位并采样当前张紧皮带(5-4,5-5)的拉力值记为f1。
50.2.控制前伺服电机(5-2)和后伺服电机(5-3)偏转一定角度φ。
51.3.再次采样当前张紧皮带(5-4,5-5)的拉力值记为f2。
52.4.将前次采样与后次采样做差记为δf。
53.5.判断若差值δf为正则伺服电机(5-2,5-3)沿前一次偏转方向进行继续偏转φ,若δf为负,则向前次方向的反方向偏转φ。
54.6.令f1=f2,重复上述3~5过程,直到经过t个时间间隔后停止,其中t》10。
55.7.将此时的拉力作为我们张紧皮带(5-4,5-5)的初始张紧力f。
56.8.打开激光位移传感器(4-2,4-4),测量h1与h2的值后由式(1)测算出h
*
,作为基准高度。
57.9.由已知参数v,h0,d,d1,d2可由公式(3)算出偏角θ。
58.10.将已知参数和假设网状滚筒(6)对输送带(7)的压力为n带入公式(4)可得目标拉力fn。
59.11.采样当前张紧皮带(5-4,5-5)的拉力值记为f2。
60.12. 将前次采样与后次采样做差记为δf。
61.13.控制前伺服电机(5-2)和后伺服电机(5-3)偏转一定角度φ。
62.14.再次进行11-12步。
63.15.判断若差值δf增大,则前伺服电机(5-2)和后伺服电机(5-3)沿φ的反方向进行偏转2φ,若δf为负,则向φ的方向偏转2φ。
64.16.重复11-15步,直到机器断电。
65.17.光电传感器(4-5)采集网状滚筒(6)的速度后,经过比例运算后,得出期望压力p
*
。
66.18.读取压力传感器(9-3)的值p1。
67.19.将p
*
与p1做差得到δp。
68.20.若则按照一定的比例调节电磁调压阀(9-4)的阀芯,使其开口变大,反之,若δp《0则按照一定的比例调节电磁调压阀(9-4)的阀芯,使其开口变小,以此来达到调压的目的。
[0069] 本发明把一种皮带机用滚筒自适应除水装置安装在运输带的下方,依靠各种传感器采集并实时反馈信息,让此装置具有滚动除水,压紧力可调, 可调气压喷干,棉麻网可更换等功能,保证在经济实用的条件下发挥网状滚筒除水喷干的优势。
[0070]
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。
[0071]
因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1