工作站、容器装卸系统和容器装卸方法与流程
本公开涉及仓储,特别涉及一种工作站、容器装卸系统和容器装卸方法。
背景技术:
1、近年来,随着电子商务的快速发展,用户订单数量呈几何倍数增长,一个仓库需要储存海量的物品,因此,如何提高仓储效率成为关键。
2、在当前的仓库管理中,将不同类型的物品分装到不同的容器中,然后将各个容器放置在可移动载具上,通过搬运可移动载具至指定位置,由指定位置处的工作人员从可移动载具上取出容器,再对容器中的物品进行拣选。这个过程需要人工参与,过程复杂、效率较低。
技术实现思路
1、有鉴于此,本公开实施例提供了一种工作站,以解决现有技术中存在的技术缺陷。本公开实施例提供了一种容器装卸系统,一种容器装卸方法。
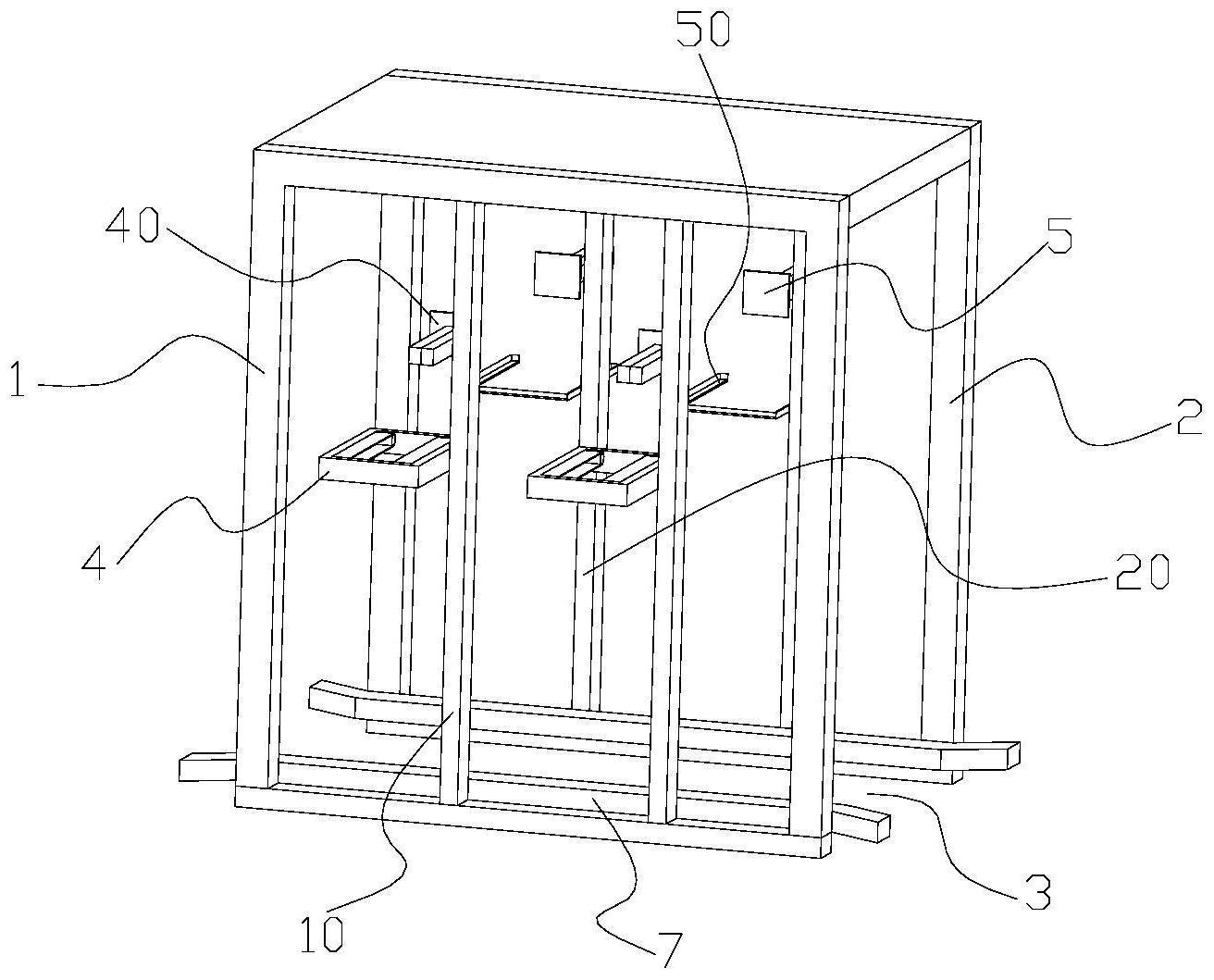
2、根据本公开实施例的第一方面,提供了一种工作站,包括可移动载具停靠位、容器装卸机构;
3、所述可移动载具停靠位被构造为用于停靠可移动载具;所述可移动载具停靠位相对的两侧分别记为第一侧、第二侧;
4、所述容器装卸机构包括位于所述第一侧的第一推动组件和第一承载组件、以及驱动所述第一推动组件和第一承载组件的运动组件;
5、所述运动组件被构造为驱动所述第一推动组件和第一承载组件运动至目标位置;
6、所述第一推动组件被构造为用于沿z轴方向从所述第一侧向所述第二侧推动所述第一承载组件上承接的待上架容器,以将其推至所述可移动载具上进行储存。
7、在本公开一个实施方式中,所述可移动载具在x轴和y轴所在平面上设有至少两行的容器储存单元,至少一个所述容器储存单元被构造为在z轴方向上贯通,且被构造为用于在z轴方向上容纳至少一个容器。
8、在本公开一个实施方式中,所述运动组件包括沿竖直的y轴方向运动的y轴运动组件;所述y轴运动组件被构造为驱动所述第一推动组件和第一承载组件沿着竖直方向运动至所述可移动载具上的目标行的位置。
9、在本公开一个实施方式中,所述可移动载具在x轴和y轴所在平面上设有至少两列的容器储存单元,至少一个所述容器储存单元被构造为在z轴方向上贯通,且被构造为用于在z轴方向上容纳至少一个容器。
10、在本公开一个实施方式中,所述第一推动组件设置有至少两个,至少两个所述第一推动组件在所述第一侧沿着所述可移动载具停靠位的延伸方向间隔排列,且与所述可移动载具上的不同列一一对应;
11、和/或,
12、所述第一承载组件设置有至少两个,至少两个所述第一承载组件在所述第一侧沿着所述可移动载具停靠位的延伸方向间隔排列,且与所述可移动载具上的不同列一一对应。
13、在本公开一个实施方式中,所述运动组件包括沿所述可移动载具停靠位的延伸方向运动的x轴运动组件;所述x轴运动组件被构造为驱动所述第一推动组件和第一承载组件沿着所述可移动载具停靠位的延伸方向运动至所述可移动载具上的目标列的位置。
14、在本公开一个实施方式中,所述可移动载具被配置为在自动搬运设备的带动下在x轴方向上移动,以使所述可移动载具移动至使其目标列与所述第一推动组件和第一承载组件相对应。
15、在本公开一个实施方式中,还包括传感器单元,所述传感器单元用于确定出所述第一推动组件和/或第一承载组件与所述可移动载具之间的位姿偏差。
16、在本公开一个实施方式中,所述运动组件还用于根据所述传感器单元确定出的所述位姿偏差,调整所述第一推动组件和/或第一承载组件的位姿,以消除所述位姿偏差。
17、在本公开一个实施方式中,所述运动组件包括天轨和/或地轨,所述运动组件被构造为在所述天轨和/或地轨上驱动所述第一推动组件和第一承载组件运动。
18、在本公开一个实施方式中,所述运动组件包括两个立柱,两个立柱相对的一侧各分布有至少一个所述第一推动组件、至少一个所述第一承载组件。
19、在本公开一个实施方式中,所述运动组件还被构造为驱动所述第一承载组件运动至与输送线或缓存位对应的位置,以将位于所述输送线或缓存位上的待上架容器转移至所述第一承载组件上。
20、在本公开一个实施方式中,所述第一推动组件和第一承载组件被配置为各自独立运动。
21、在本公开一个实施方式中,所述运动组件被构造为驱动所述第一推动组件、第一承载组件同步运动至目标位置。
22、在本公开一个实施方式中,所述第一承载组件包括基座,所述基座上设置有用于容纳容器的承载位;所述第一推动组件包括设置在所述基座上的推动部,所述推动部被构造为用于沿z轴方向将所述第一承载组件上承接的待上架容器推动至所述可移动载具上储存。
23、在本公开一个实施方式中,所述可移动载具上设有至少一个容器储存单元,至少一个所述容器储存单元被构造为在z轴方向上至少设有邻近所述第一侧布置的第一储存位,以及邻近所述第二侧布置的第二储存位;所述第一推动组件被构造为沿z轴方向将所述第一承载组件上承接的待上架容器推动至所述第一储存位后,所述可移动载具被构造为运动至使其第二侧的第二储存位与第一推动组件相对应,所述第一推动组件被构造为沿z轴方向将所述第一承载组件上承接的待上架容器推动至所述第二储存位储存。
24、在本公开一个实施方式中,至少一个所述容器储存单元沿z轴方向上至少设置有邻近所述第一侧布置的第一储存位,以及邻近所述第二侧布置的第二储存位;
25、所述第一推动组件被构造为沿z轴方向将所述第一承载组件上承接的待上架容器推动至所述第一储存位或第二储存位储存。
26、在本公开一个实施方式中,所述第一推动组件被配置为:根据所述容器储存单元沿z轴方向延伸的深度,以及待上架容器在容器储存单元中储存的位置,由所述第一侧向所述第二侧的方向推动相应的距离,以将待上架容器推至可移动载具上。
27、在本公开一个实施方式中,在所述第一储存位已有第一容器储存的情况下,通过所述待上架容器的运动将所述第一容器从所述第一储存位推动至所述第二储存位储存;
28、或者,
29、在所述第一储存位已有第一容器储存或在所述第二储存位已有第二容器储存的情况下,通过所述待上架容器的运动将所述第一容器或第二容器从第二侧推出;
30、或者,
31、在所述第一储存位已有第一容器储存、第二储存位已有第二容器储存的情况下,通过所述待上架容器推动所述第一容器运动,并通过第一容器的运动将第二容器从所述第二侧推出。
32、在本公开一个实施方式中,还包括位于所述第二侧的第二承载组件以及驱动第二承载组件的运动组件;位于所述第二侧的运动组件被构造为驱动所述第二承载组件运动至目标位置,所述第二承载组件被构造为用于承接从所述第二侧被推出的容器。
33、在本公开一个实施方式中,位于所述第二侧的运动组件被构造为驱动所述第二承载组件运动至与输送线或缓存位对应的位置,以将位于所述第二承载组件上的容器转移至所述输送线或缓存位上;或者是,以将位于所述输送线或缓存位上的容器转移至所述第一承载组件上。
34、在本公开一个实施方式中,所述容器装卸机构还包括位于所述第二侧的第二推动组件,所述第二推动组件被构造为用于将位于所述第二承载组件上的容器推至可移动载具、输送线、缓存位中的至少一个上。
35、在本公开一个实施方式中,所述第二承载组件包括基座,所述基座上设置有用于容纳容器的承载位;所述第二推动组件包括推动部,所述推动部被构造为用于沿z轴方向推出或缩回。
36、在本公开一个实施方式中,所述第二推动组件被构造为用于将位于所述第二承载组件上的待上架容器推送至可移动载具上相应的容器储存单元中,并通过所述待上架容器的移动将所述容器储存单元中的另一容器从原储存位移动至相邻储存位进行储存;或者将所述另一容器从第一侧推出,所述第一承载组件被配置为用于承载从所述第一侧被推出的容器。
37、在本公开一个实施方式中,所述容器装卸机构还包括位于所述第二侧的第二推动组件以及驱动所述第二推动组件的运动组件,位于所述第二侧的运动组件被构造为驱动所述第二推动组件运动至目标位置;所述第二推动组件被构造为用于沿z轴方向从所述第二侧向所述第一侧推动所述可移动载具上的容器,以便于将所述可移动载具上的容器从所述第一侧推出;所述第一承载组件被构造为从所述第一侧承接所述可移动载具上被所述第二推动组件推出的容器。
38、在本公开一个实施方式中,所述第一推动组件被构造为用于沿z轴方向从所述第一侧向所述第二侧推动所述可移动载具上的容器,以便于将所述可移动载具上的容器从所述第二侧推出;还包括位于所述第二侧的第二承载组件以及驱动所述第二承载组件的运动组件;位于所述第二侧的运动组件被构造为驱动所述第二承载组件运动至目标位置,以从所述第二侧承接所述可移动载具上被所述第一推动组件推出的容器。
39、在本公开一个实施方式中,还包括视觉检测装置,所述视觉检测装置被配置为用于检测容器中物品的种类和/或数量。
40、在本公开一个实施方式中,还包括定位机构,所述定位机构设置在所述可移动载具停靠位中,且被构造为用于对位于所述可移动载具停靠位中的可移动载具的位置进行定位,和/或,进行限位。
41、根据本公开实施例的第二方面,提供了一种容器装卸系统,所述容器装卸系统包括服务器、至少一个自动搬运设备和至少一个上述的工作站;
42、所述服务器,被配置为向所述自动搬运设备发送搬运指令、向所述工作站发送上架操作指令;
43、所述自动搬运设备,被配置为基于所述搬运指令搬运可移动载具,并将所述可移动载具搬运至所述可移动载具停靠位中;
44、所述工作站中的运动组件,被配置为基于所述上架操作指令,驱动所述第一推动组件和第一承载组件运动至目标位置;
45、所述第一推动组件,被配置为基于所述上架操作指令,沿z轴方向从所述第一侧向所述第二侧推动所述第一承载组件上承接的待上架容器,以将其推至所述可移动载具上进行储存。
46、根据本公开实施例的第三方面,提供了一种容器装卸方法,应用于上述的容器装卸系统,所述方法包括:
47、服务器向自动搬运设备发送搬运指令,以及向工作站发送上架操作指令;
48、所述自动搬运设备基于所述搬运指令,搬运可移动载具至可移动载具停靠位中;
49、所述工作站中的运动组件基于所述上架操作指令,驱动第一推动组件和第一承载组件运动至目标位置;
50、所述第一推动组件基于所述上架操作指令,沿z轴方向从所述第一侧向所述第二侧推动所述第一承载组件上承接的待上架容器,以将其推至所述可移动载具上进行储存。
51、在本公开一个实施方式中,在所述第一推动组件基于所述上架操作指令,沿z轴方向从所述第一侧向所述第二侧推动所述第一承载组件上承接的待上架容器的步骤之后,所述方法还包括:
52、所述服务器获得所述待上架容器在所述可移动载具上的位置信息,对所述位置信息进行更新记录。
53、本实施例提供一种工作站、容器装卸系统和容器装卸方法,工作站包括可移动载具停靠位和容器装卸机构。其中,可移动载具停靠位被构造为用于停靠可移动载具;可移动载具停靠位相对的两侧分别记为第一侧、第二侧。容器装卸机构至少包括位于第一侧的第一推动组件和第一承载组件、以及驱动第一推动组件和第一承载组件的运动组件。运动组件被构造为驱动第一推动组件和第一承载组件运动至目标位置;第一推动组件被构造为用于沿z轴方向从第一侧向第二侧推动第一承载组件上承接的待上架容器,以将其推至可移动载具上进行储存。通过工作站中容器上架机构的第一推动组件,可以自动地将第一承载组件上承接的待上架容器推动至可移动载具上存储,可见,该实施例中容器上架的过程无需人工参与,缩短了容器上架的时间,从而提高了容器上架效率。
- 还没有人留言评论。精彩留言会获得点赞!