一种智能制造车间用物品放置稳定防冲击的智能转移设备的制作方法
1.本发明涉及智能制造车间运输技术领域,尤其涉及一种智能制造车间用物品放置稳定防冲击的智能转移设备。
背景技术:
2.智能制造是一种由智能机器和人类专家共同组成的人机一体化智能系统,它在制造过程中能进行智能活动,诸如分析、推理、判断、构思和决策等,通过人与智能机器的合作共事,去扩大、延伸和部分地取代人类专家在制造过程中的脑力劳动,它把制造自动化的概念更新,扩展到柔性化、智能化和高度集成化。
3.现有技术中,采用地面转运设备对车间制造的集装物品进行行走时转运,转运时,转运车辆的行走和运输情况受地面环境的影响,尤其对于智能制造车间的开发和推广,在满足生产制造的同时,还需要外来人员的学习和参考.
4.当外来人员进入车间学习时,智能转移设备需要停机运行,而一旦智能转移设备停机,对整体制造车间的生产影响即为严重,当制造货架处于堆积状态时,货物无法及时的进行转移而无法继续生产,甚至导致所有设备停机运行的状态,来满足外来学习人员的充分学习,而一旦停机,学习人员的体验和动态观察则明显下降,智能制造车间的技术和静态效果明显没有运作起来的更加显著,更具有说服力,不方便对智能制造技术的推广和发展。
5.因此,有必要提供一种智能制造车间用物品放置稳定防冲击的智能转移设备解决上述技术问题。
技术实现要素:
6.本发明提供一种智能制造车间用物品放置稳定防冲击的智能转移设备,解决了地面转运设备在智能制造车间运行时易受到地面人员的干扰的问题。
7.为解决上述技术问题,本发明提供的智能制造车间用物品放置稳定防冲击的智能转移设备包括:吊装导轨和对接架,所述对接架安装于所述吊装导轨的外侧,所述对接架的外表面安装有行走电机,所述行走电机的输出端固定安装有行走滚轮;固定主轴,所述固定主轴的顶端固定安装于所述对接架的底部;防护外罩,所述防护外罩的顶部固定安装于所述固定主轴的底端;至少两组支撑滚轮,所述支撑滚轮的底部固定安装于所述防护外罩的顶部;升降电机,所述升降电机的表面固定安装于所述防护外罩的外表面,所述升降电机的输出端固定安装有缠绕辊,所述缠绕辊的表面缠绕安装有牵引钢绳;抱夹机构,所述抱夹机构的顶端固定安装于所述牵引钢绳的底端。
8.优选的,两组所述支撑滚轮对称分布在所述固定主轴的两侧,并且两组支撑滚轮的表面与所述行走滚轮的表面之间呈等腰三角形分布。
9.优选的,所述抱夹机构包括安装板,所述安装板的底部转动安装有两组转动臂,所述转动臂上开设有传动槽,并且转动臂的内侧固定安装有限位板,所述安装板的外表面固定安装有第一伸缩件,所述第一伸缩件的输出端固定安装有至少两组第一传动轴。
10.优选的,所述安装板的表面的两侧与所述防护外罩的内表面滑动连接,并且安装板的顶端与所述牵引钢绳的底端固定连接。
11.优选的,所述转动臂的外表面与所述防护外罩的内表面相适配,两组所述转动臂的表面之间对称分布且结构相同。
12.优选的,所述第一传动轴的一端插入所述传动槽的内部,并且第一传动轴的表面与所述传动槽的内表面传动连接。
13.优选的,所述安装板的顶端固定安装有导向滚轮,所述导向滚轮上的滚轮表面与所述防护外罩的内表面滑动连接。
14.优选的,所述升降电机的输出端贯穿所述防护外罩的表面且延伸至所述防护外罩的内部,并且升降电机的输出端与所述防护外罩的表面转动连接,所述缠绕辊安装于所述防护外罩的内部。
15.优选的,所述防护外罩上固定安装有第二伸缩件,所述第二伸缩件的输出端固定安装有升降架,所述升降架的顶端固定安装有刹车盘。
16.优选的,所述升降架的内表面滑动安装于所述固定主轴的外表面,所述刹车盘的表面与所述吊装导轨的表面相适配。
17.与相关技术相比较,本发明提供的智能制造车间用物品放置稳定防冲击的智能转移设备具有如下有益效果:
18.1、本发明提供一种智能制造车间用物品放置稳定防冲击的智能转移设备,采用吊装导轨上增设行走机构、辅助支撑机构、防护机构、升降机构和抱夹机构,通过行走机构配合辅助支撑机构为抱夹后的器械进行稳定的输送,同时抱夹机构配合升降机构能够稳定的收入防护机构的内部,以便于对抱夹中的器械箱体整体进行收起和防护,抱夹机构收起后受到防护机构的遮挡而无法进行伸展调节,从而防止了抱夹部分的松动,增强抬升抱夹运输时的稳定性,同时爱用吊装运输的方式可以有效的避免地面作业时受到参观和学习环境的影响,有利于智能制造技术的推广和发展;
19.2、通过在防护外罩的上方安装有刹车机构,方便对防护外罩吊装行走后进行减速和刹车,以便于防护外罩吊装转运的精准定位,同时保障抱夹机构在升降调节时的稳定性,避免抱夹过程中设备发生晃动的现象;
20.3、通过联动机构配合抱夹机构的升降调节来控制刹车机构的自动刹车和自动收起,以便于抱夹机构上下调节抱夹时自动增加防护外罩动作时的稳定性,同时抱夹机构完全收在防护外罩的内部时,刹车结构自动脱离吊装导轨的表面,抱夹后的转运器械进行稳定的输送,采用联动结构在动作的过程中不需要单独的刹车动力能够自适应的开启和关闭刹车的作用。
附图说明
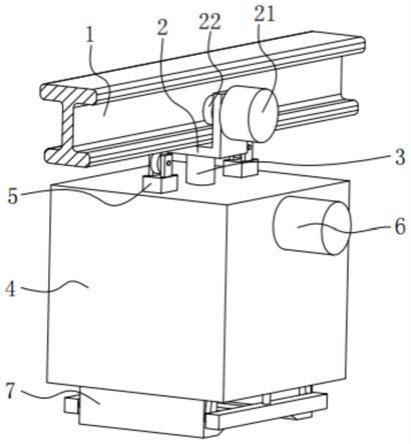
21.图1为本发明提供的智能制造车间用物品放置稳定防冲击的智能转移设备的第一实施例的三维图;
22.图2为图1所示的抱夹机构的三维图;
23.图3为图1所示的防护外罩部分的剖视图;
24.图4为本发明提供的智能制造车间用物品放置稳定防冲击的智能转移设备的第二
实施例的结构示意图;
25.图5为本发明提供的智能制造车间用物品放置稳定防冲击的智能转移设备的优化方案的结构示意图;
26.图6为图5所示的a部的放大示意图。
27.图中标号:
28.1、吊装导轨;
29.2、对接架,21、行走电机,22、行走滚轮;
30.3、固定主轴;
31.4、防护外罩;
32.5、支撑滚轮;
33.6、升降电机,61、缠绕辊,62、牵引钢绳;
34.7、抱夹机构,71、安装板,72、转动臂,721、传动槽,722、限位板,73、第一伸缩件,74、联动板,75、第一传动轴,701、导向滚轮;
35.8、第二伸缩件,81、升降架,82、刹车盘;
36.9、转动主轴,91、转动板,911、传动孔,92、接触轴,93、第二传动轴,931、升降杆,94、支撑托板,95、支撑弹簧,96、升降板。
具体实施方式
37.下面结合附图和实施方式对本发明作进一步说明。
38.第一实施例:
39.请结合参阅图1、图2和图3,其中,图1为本发明提供的智能制造车间用物品放置稳定防冲击的智能转移设备的第一实施例的三维图;图2为图1所示的抱夹机构的三维图;图3为图1所示的防护外罩部分的剖视图。
40.一种智能制造车间用物品放置稳定防冲击的智能转移设备包括:吊装导轨1和对接架2,所述对接架2安装于所述吊装导轨1的外侧,所述对接架2的外表面安装有行走电机21,所述行走电机21的输出端固定安装有行走滚轮22;
41.固定主轴3,所述固定主轴3的顶端固定安装于所述对接架2的底部;
42.防护外罩4,所述防护外罩4的顶部固定安装于所述固定主轴3的底端;
43.至少两组支撑滚轮5,所述支撑滚轮5的底部固定安装于所述防护外罩4的顶部;
44.升降电机6,所述升降电机6的表面固定安装于所述防护外罩4的外表面,所述升降电机6的输出端固定安装有缠绕辊61,所述缠绕辊61的表面缠绕安装有牵引钢绳62;
45.抱夹机构7,所述抱夹机构7的顶端固定安装于所述牵引钢绳62的底端。
46.两组所述支撑滚轮5对称分布在所述固定主轴3的两侧,并且两组支撑滚轮5的表面与所述行走滚轮22的表面之间呈等腰三角形分布。
47.采用吊装导轨1上增设行走机构、辅助支撑机构、防护机构、升降机构和抱夹机构,通过行走机构配合辅助支撑机构为抱夹后的器械进行稳定的输送,同时抱夹机构配合升降机构能够稳定的收入防护机构的内部,以便于对抱夹中的器械箱体整体进行收起和防护,抱夹机构收起后受到防护机构的遮挡而无法进行伸展调节,从而防止了抱夹部分的松动,增强抬升抱夹运输时的稳定性,同时爱用吊装运输的方式可以有效的避免地面作业时受到
参观和学习环境的影响,有利于智能制造技术的推广和发展。
48.行走机构包括对接架2、两个行走电机21、两个行走滚轮22,其中一个行走电机21对应一个行走滚轮22,两个行走电机21对称安装在对接架2的两侧,并且两个行走滚轮22对称安装在吊装导轨1的两侧,行走滚轮22的表面与吊装导轨1的内表面滚动连接,主要用于抱夹机构7整体在吊装导轨1上进行行走;
49.辅助支撑机构包括两个支撑滚轮5,支撑滚轮5安装于吊装导轨1的底面与防护外罩4的顶面之间,用于增加对接架2通过固定主轴3连接的防护外罩4移动过程中的稳定性,防止防护外罩4在行走的方向上发生摆动的现象,主要用于对抱夹机构7整体在吊装导轨1上行走时的辅助支撑和限位;
50.防护机构包括防护外罩4,防护外罩4的顶端通过固定主轴3固定安装于对接架2的底部,同时用于对抱夹机构7的伸缩调节提供空间,能够配合抱夹机构7进行使用,主要用于配合配合升降机构和抱夹机构7对抱夹后的机械零部件转运箱的防护,增强转运时的稳定性,防止零部件发生晃动脱落的现象;
51.升降机构包括升降电机6、缠绕辊61、牵引钢绳62,牵引钢绳62的顶端固定在缠绕辊61的表面,并且牵引钢绳62的表面缠绕在牵引钢绳62的外表面上,牵引钢绳62的实际长度可根据具体使用的需求选择和设定,只需要满足抱夹机构7正常的升降调节即可,主要安装在防护外罩4上,为抱夹机构7提供升降调节的动力来源。
52.所述抱夹机构7包括安装板71,所述安装板71的底部转动安装有两组转动臂72,所述转动臂72上开设有传动槽721,并且转动臂72的内侧固定安装有限位板722,所述安装板71的外表面固定安装有第一伸缩件73,所述第一伸缩件73的输出端固定安装有至少两组第一传动轴75。
53.抱夹机构7通过升降机构来控制其使用的高度,当安装板71的顶面表面低于防护外罩4的底面时,抱夹机构7可正常的抱夹操作,使得抱夹的器械处于最低抱夹点位上,获得安全的抱夹环境,抱夹过程中通过第一伸缩件73带动联动板74升降调节,联动板74升降调节时带动第一传动轴75同步升降,第一传动轴75通过传动槽721方便带动转动臂72进行转动,用于控制转动臂72的展开和收起,从而实现对机械零部件转运箱体的夹持和释放。
54.所述安装板71的表面的两侧与所述防护外罩4的内表面滑动连接,并且安装板71的顶端与所述牵引钢绳62的底端固定连接。
55.所述转动臂72的外表面与所述防护外罩4的内表面相适配,两组所述转动臂72的表面之间对称分布且结构相同。
56.转动臂72收起时,安装板71能够稳定的带动转动臂72向上移动,转动臂72向上移动时朝向防护外罩4的内部收缩。
57.所述第一传动轴75的一端插入所述传动槽721的内部,并且第一传动轴75的表面与所述传动槽721的内表面传动连接。
58.所述安装板71的顶端固定安装有导向滚轮701,所述导向滚轮701上的滚轮表面与所述防护外罩4的内表面滑动连接。
59.通过导向滚轮701为安装板71的升降调节提供辅助支撑和限位的作用,保障安装板71升降调节的稳定性,从而保障抱夹后零部件转运箱体升降调节时的稳定性。
60.所述升降电机6的输出端贯穿所述防护外罩4的表面且延伸至所述防护外罩4的内
部,并且升降电机6的输出端与所述防护外罩4的表面转动连接,所述缠绕辊61安装于所述防护外罩4的内部。
61.升降电机6使用时连接外界的电源,也可配备可充电的便捷式电源,电源的供给采用现有技术中的电源即可。
62.第一伸缩件73采用液压伸缩缸,使用时配备液压控制设备,为第一伸缩件73输出端的升降调控提供动力来源,液压控制设备采用现有技术中的液压设备,为第一伸缩件73的伸缩调节提供支持。
63.本发明提供的智能制造车间用物品放置稳定防冲击的智能转移设备的工作原理如下:
64.行走时,启动行走电机21,行走电机21带动行走滚轮22转动,行走滚轮22在吊装导轨1的表面上进行稳定的滚动,行走滚轮22滚动时同步带动对接架2移动,对接架2通过固定主轴3带动防护外罩4以及其上的支撑滚轮5、抱夹机构7同步移动,以便于机械零部件转运箱抱夹后的转运;
65.抱夹时,抱夹机构7移动至机械零部件转运箱的正上方,启动升降电机6,升降电机6带动缠绕辊61转动,缠绕辊61带动牵引钢绳62放线,牵引钢绳62带动抱夹机构7向下移动,抱夹机构7移动至机械零部件转运箱的正上方时,启动第一伸缩件73,第一伸缩件73带动联动板74向上移动,联动板74带动第一传动轴75向上移动,第一传动轴75通过传动槽721带动转动臂72向外侧转动,实现转动臂72的展开;
66.转动臂72展开后继续带动牵引钢绳62放线,转动臂72展开后套设在机械零部件转运箱的外表面,安装板71的底部与机械零部件转运箱的顶部抵接时,关闭升降电机6,再次启动第一伸缩件73,第一伸缩件73带动联动板74向下移动,联动板74通过第一传动轴75和传动槽721带动转动臂72收缩抱紧,转动臂72带动底部的限位板722卡入机械零部件转运箱的底部,直至转动臂72调节至竖直状态,关闭第一伸缩件73;
67.反向启动升降电机6,升降电机6带动抱夹机构7整体以及抱夹状态的机械零部件转运箱向上收入防护外罩4的内部,完全收入防护外罩4的内部时,关闭升降电机6,启动行走机构,对抱夹后的机械零部件转运箱进行吊装转运。
68.与相关技术相比较,本发明提供的智能制造车间用物品放置稳定防冲击的智能转移设备具有如下有益效果:
69.采用吊装导轨1上增设行走机构、辅助支撑机构、防护机构、升降机构和抱夹机构,通过行走机构配合辅助支撑机构为抱夹后的器械进行稳定的输送,同时抱夹机构配合升降机构能够稳定的收入防护机构的内部,以便于对抱夹中的器械箱体整体进行收起和防护,抱夹机构收起后受到防护机构的遮挡而无法进行伸展调节,从而防止了抱夹部分的松动,增强抬升抱夹运输时的稳定性,同时爱用吊装运输的方式可以有效的避免地面作业时受到参观和学习环境的影响,有利于智能制造技术的推广和发展。
70.第二实施例:
71.请参阅图4、图5和图6,基于本技术的第一实施例提供的一种智能制造车间用物品放置稳定防冲击的智能转移设备,本技术的第二实施例提出另一种智能制造车间用物品放置稳定防冲击的智能转移设备。第二实施例仅仅是第一实施例优选的方式,第二实施例的实施对第一实施例的单独实施不会造成影响。具体的,本技术的第二实施例提供的智能制
造车间用物品放置稳定防冲击的智能转移设备的不同之处在于,智能制造车间用物品放置稳定防冲击的智能转移设备,还包括:
72.所述防护外罩4上固定安装有第二伸缩件8,所述第二伸缩件8的输出端固定安装有升降架81,所述升降架81的顶端固定安装有刹车盘82。
73.通过在防护外罩4的上方安装有刹车机构,方便对防护外罩4吊装行走后进行减速和刹车,以便于防护外罩4吊装转运的精准定位,同时保障抱夹机构7在升降调节时的稳定性,避免抱夹过程中设备发生晃动的现象。
74.所述升降架81的内表面滑动安装于所述固定主轴3的外表面,所述刹车盘82的表面与所述吊装导轨1的表面相适配。
75.第二伸缩件8采用液压缸,使用时连接外界的液压控制设备,液压控制设备采用现有技术中的液压设备,为升降架81的升降调节提供动力的来源。
76.有益效果:
77.通过在防护外罩4的上方安装有刹车机构,方便对防护外罩4吊装行走后进行减速和刹车,以便于防护外罩4吊装转运的精准定位,同时保障抱夹机构7在升降调节时的稳定性,避免抱夹过程中设备发生晃动的现象。
78.进一步的,所述防护外罩4的内侧固定安装有转动主轴9,所述转动主轴9的表面转动安装有转动板91,所述转动板91上开设有传动孔911,并且转动板91的一侧固定安装有接触轴92,所述接触轴92的表面与所述安装板71的表面抵接,所述传动孔911的内表面传动连接有第二传动轴93,所述第二传动轴93的一端固定安装有升降杆931,所述防护外罩4的内侧固定安装有支撑托板94,所述支撑托板94的表面为u形结构,并且支撑托板94的顶部固定安装有支撑弹簧95,所述支撑弹簧95的顶端固定安装有升降板96,所述升降板96的顶端与所述第二伸缩件8的底端固定连接,并且升降板96的底部与所述升降杆931的顶端固定连接。
79.第二伸缩件8的顶部贯穿防护外罩4的表面且延伸至防护外罩4的上方,为第二伸缩件8表面的升降调节提供限位和支撑的作用,保障第二伸缩件8升降调节时的稳定性。
80.转动板91的表面与支撑托板94的表面错位分布,不会对转动板91转动调节时造成阻碍;
81.升降杆931和第二传动轴93之间呈l形结构,方便通过传动孔911和第二传动轴93带动升降杆931进行同步调节;
82.在接触轴92的底部受到安装板71向上的推力时,安装板71收起,且接触轴92通过转动主轴9带动转动板91的表面转动至水平状态,转动板91通过传动孔911、第二传动轴93和升降杆931同步拉动升降板96向下收起,升降板96对支撑弹簧95进行压缩收缩,升降板96同步带动第二伸缩件8向下收缩,第二伸缩件8能够同步带动刹车架81和刹车盘82向下收起,从而方便抱夹机构7收起时刹车盘82自动脱离刹车状态,以便于设备整体的行走,行走的过程中,也可通过第二伸缩件8继续带动刹车架81和刹车盘82升降调节,用于抱夹状态下移动时的刹车使用;
83.在抱夹机构7向下移动时,安装板71向下移动且脱离对接触轴92向上的推力,支撑弹簧95在弹力的作用下推动升降板96向上移动,升降板96带动第二伸缩件8向上移动,第二伸缩件8带动升降架81向上移动,第二伸缩件8带动刹车盘82向上移动,使得刹车盘82的表
面与吊装导轨1的底面抵接限位,增加抱夹机构7升降调节过程中的自动刹车功能,增强抱夹机构7升降过程中的稳定性,不需要单独启动第二伸缩件8也能够完成刹车的动作。
84.通过联动机构配合抱夹机构7的升降调节来控制刹车机构的自动刹车和自动收起,以便于抱夹机构7上下调节抱夹时自动增加防护外罩4动作时的稳定性,同时抱夹机构7完全收在防护外罩4的内部时,刹车结构自动脱离吊装导轨1的表面,抱夹后的转运器械进行稳定的输送,采用联动结构在动作的过程中不需要单独的刹车动力能够自适应的开启和关闭刹车的作用。
85.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1