一种灭机设备的制作方法
1.本发明涉及自动化产线,尤其是涉及一种灭机设备。
背景技术:
2.笔记本电脑又被称为“便携式电脑,手提电脑、掌上电脑或膝上型电脑”,其最大的特点就是机身小巧,相比pc携带方便,是一种小型、可便于携带的个人电脑,通常重1-3公斤。当前的发展趋势是体积越来越小,重量越来越轻,而功能却越发强大。
3.笔记本电脑在加工过程中,需要开机进行测试,测试完成后需要关掉电脑,进行下一步操作。
4.目前,关机这一过程都是由操作人员手动完成,产品到位后,操作人员翻起产品,手动插入电源线激活电脑,再按压ctrl+z组合按键进行灭机,最后拔下电源线,产品继续流向下一站。然而,整个工作节拍跟操作人员的熟练程度相关,工作效率较低。
技术实现要素:
5.为了克服现有技术的不足,本发明的目的之一在于提供一种能够提高生产效率的自动灭机设备。
6.本发明的目的之一采用如下技术方案实现:
7.一种灭机设备,包括用于输送笔记本电脑的输送结构、机器人以及第一升降移动结构,所述机器人位于所述输送结构一侧形成灭机工位,所述机器人还包括主体、两安装于所述主体的机械臂、按压结构、插拔结构以及位置获取结构,所述按压结构安装于一所述机械臂,所述插拔结构以及所述位置获取结构安装于另一所述机械臂,所述位置获取结构获取电源接口的位置信息,所述插拔结构与电源接口插接给笔记本电脑供电,所述按压结构按压笔记本电脑使笔记本电脑关机,所述输送结构的数量为多个,多个所述输送结构的输送方向不同,所述第一升降移动结构能够上下升降将一所述输送结构上的笔记本电脑转移至另一所述输送结构。
8.进一步的,所述按压结构包括转盘、第一驱动件以及两按压组件,所述转盘固定于所述机械臂,所述第一驱动件转动安装于所述转盘,两所述按压组件安装于所述第一驱动件的输出端,所述第一驱动件带动所述按压组件移动以调节两所述按压组件之间的距离,笔记本电脑的规格信息已经与载具frid在上游工站实现绑定,当站rfid识别器读取载具信息,匹配对应的产品规格,自动切换工艺配方,调整按压组件间距,使所述按压组件能够在生产14/15寸大小不同pc产品时自动调整或切换工艺参数。
9.进一步的,每一所述按压组件包括连接板以及按压件,所述按压件通过弹性件浮动安装于所述连接板。
10.进一步的,所述位置获取结构包括光源以及相机,所述光源为所述相机提供光照,所述相机拍摄电源接口的照片获取所述电源接口的位置。
11.进一步的,所述灭机设备还包括第一定位结构,所述第一定位结构包括第二驱动
件以及滚轮,所述第二驱动件带动所述滚轮移动以抵触笔记本电脑使笔记本电脑定位。
12.进一步的,所述第一定位结构的数量为两个,两所述第一定位结构位于灭机工位的两侧,所述滚轮沿灭机工位的输送方向滚动。
13.进一步的,所述灭机设备还包括第二定位结构,所述第二定位结构包括支架、第三驱动件、第四驱动件以及第一夹爪,所述第三驱动件固定于所述支架并能带动所述第四驱动件以及所述第一夹爪上下移动,所述第四驱动件安装于所述第三驱动件的输出端并能带动所述第一夹爪移动至灭机工位上,所述第一夹爪抵触笔记本电脑。
14.进一步的,所述第一升降移动结构包括第七驱动件、第八驱动件以及传送带,所述第八驱动件带动所述传送带转动,所述第七驱动件带动所述传送带上下移动使传送带伸出所述输送结构或低于所述输送结构,所述传送带的延伸方向与所述输送结构的输送方向垂直。
15.进一步的,所述第一升降移动结构位于两所述输送结构之间。
16.进一步的,所述灭机设备还包括工作台,所述灭机工位与部分所述输送结构以及部分所述第一升降移动结构位于所述工作台上形成主流产线,部分所述输送结构以及部分所述第一升降移动结构所述工作台下形成回流产线。
17.相比现有技术,本发明灭机设备的按压结构安装于一机械臂,插拔结构以及位置获取结构安装于另一机械臂,结构设置合理,整体结构简单、占用空间小;输送结构的数量为多个,多个输送结构的输送方向不同,第一升降移动结构能够上下升降将一输送结构上的笔记本电脑转移至另一输送结构,使产线能够纵向设置,减少横向长度。
附图说明
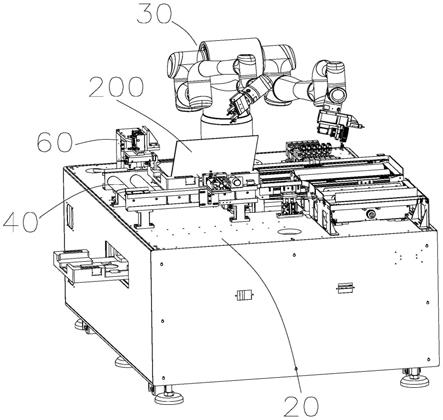
18.图1为本发明灭机设备的立体图;
19.图2为图1的灭机设备的内部结构图;
20.图3为图2的灭机设备的机器人的立体图;
21.图4为图3的机器人的按压结构的立体图;
22.图5为图3的机器人的插拔结构的立体图;
23.图6为图2的灭机设备的主流产线的立体图;
24.图7为图6的主流产线的第二定位结构的立体图;
25.图8为图6的主流产线的第三定位结构的立体图;
26.图9为图6的主流产线的第一升降移动结构的立体图;
27.图10为图6的主流产线的第二升降移动结构的立体图。
28.图中:10、壳体;11、第一进出口;12、第二进出口;20、工作台;30、机器人;31、主体;32、机械臂;33、按压结构;330、转盘;331、第一驱动件;332、按压组件;333、连接板;334、按压件;34、插拔结构;340、第一安装板;341、插接头;35、位置获取结构;350、光源;351、相机;40、输送结构;50、第一定位结构;51、第二驱动件;52、滚轮;60、第二定位结构;61、支架;62、第三驱动件;63、第四驱动件;64、第一夹爪;70、第三定位结构;71、第二安装板;72、第五驱动件;73、第六驱动件;74、第二夹爪;80、第一升降移动结构;81、安装架;82、第七驱动件;83、传送带;84、第八驱动件;90、第二升降移动结构;91、第九驱动件;92、第三安装板;93、第十驱动件;94、转轮;200、笔记本电脑。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在另一中间组件,通过中间组件固定。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在另一中间组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在另一中间组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
31.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
32.图1至图10为本发明灭机设备,用以使笔记本电脑200关机。
33.灭机设备包括壳体10、工作台20、机器人30、输送结构40、第一定位结构50、第二定位结构60、第三定位结构70、第一升降移动结构80以及第二升降移动结构90。
34.工作台20固定于壳体10内。机器人30固定于工作台20上方,机器人30、部分输送结构40、第一定位结构50、第二定位结构60、第三定位结构70、部分第一升降移动结构80以及第二升降移动结构90位于工作台20上方形成主流产线,另一部分输送结构40、第一升降移动结构80位于工作台20下方形成回流产线。
35.壳体10两侧分别设有第一进出口11以及第二进出口12。第一进出口11位于第二进出口12上方。两第一进出口11供主流产线上的载具以及笔记本电脑200进出,两第二进出口12供回流产线上的载具进出。
36.机器人30包括主体31、两机械臂32、按压结构33、插拔结构34以及位置获取结构35。主体31固定于工作台20。两机械臂32安装于主体31。按压结构33安装于一机械臂32的末端。
37.按压结构33包括转盘330、第一驱动件331以及两按压组件332。转盘330固定于机械臂32的末端,第一驱动件331固定于转盘330,两按压组件332安装于第一驱动件331的输出端。第一驱动件331带动两按压组件332移动调节两按压组件332之间的距离,以适用不同的笔记本电脑200。每一按压组件332包括连接板333以及按压件334。连接板333安装于第一驱动件331的输出端,按压件334弹性安装于连接板333,使按压件334与按键按压时受力均匀且轻柔,避免按键损伤。笔记本电脑200的规格信息已经与载具frid在上游工站实现绑定,当站rfid识别器读取载具信息,匹配对应的产品规格,自动切换工艺配方,调整按压组件332间距,使按压组件332能够在生产14/15寸大小不同pc产品时自动调整或切换工艺参数。
38.插拔结构34固定于另一机械臂32,位置获取结构35也同时固定于这个机械臂32。具体的,插拔结构34包括第一安装板340以及插接头341。第一安装板340固定于机械臂32,
插接头341浮动安装于第一安装板340。位置获取结构35包括光源350以及相机351,光源350以及相机351固定于第一安装板340,光源350为相机351提供光照,相机351拍摄电源接口的照片获取电源接口的位置,便于插拔结构34插接。插拔结构34具体为电源连接插头,电源连接插头为type-c接头,同时可以实现充电、加载pc产品工单信息、切换pc系统程序从工厂模式转化为用户模式系统程序,以及其他自定义的拓展通信通能。
39.输送结构40包括若干滚筒,若干滚筒平行设置,形成输送通道。输送结构40的数量为多个,多个输送结构40的输送方向垂直,并根据产线需求设置。
40.第一定位结构50包括第二驱动件51以及滚轮52。第二驱动件51固定于输送结构40一侧,第二驱动件51带动滚轮52带动前后移动。滚轮52转动安装于框架,第二驱动件51带动滚轮52移动抵触笔记本电脑200,使笔记本电脑200定位。由于滚轮52能够转动,不影响笔记本电脑200的移动。第一定位结构50的数量为两个,两第一定位结构50分别位于输送结构40的相对两侧以定位笔记本电脑200的相对两侧。
41.第二定位结构60包括支架61、第三驱动件62、第四驱动件63以及第一夹爪64。支架61固定于工作台20。第三驱动件62固定于支架61,第三驱动件62能够带动第四驱动件63以及第一夹爪64上下移动。第四驱动件63安装于第三驱动件62的输出端,第四驱动件63带动第一夹爪64移动以夹持笔记本电脑200。第一夹爪64的截面呈梯形,与笔记本电脑200边缘契合。通过上述设计,第二定位结构60设置在输送结构40侧部,但第一夹爪64能够伸至滚筒的载具上,在定位笔记本电脑200侧部的同时,不影响笔记本电脑200沿主流产线的输送。
42.第三定位结构70包括第二安装板71、第五驱动件72、第六驱动件73以及第二夹爪74。第二安装板71固定于工作台20的底部。第五驱动件72固定于第二安装板71,第五驱动件72带动第六驱动件73以及第二夹爪74上下移动。第六驱动件73安装于第五驱动件72的输出端,第二夹爪74固定于第六驱动件73的输出端,第六驱动件73带动第二夹爪74横向移动。为了防止第三定位结构70影响笔记本电脑200沿主流产线移动,第三定位结构70位于主流产线下方。
43.第一升降移动结构80包括安装架81、第七驱动件82、传送带83、第八驱动件84。第一升降移动结构80位于主流产线两侧,并且从一输送结构40末端延伸至另一输送结构40的末端。两输送结构40的输送方向相垂直。传送带83套设于安装架81上,第七驱动件82带动安装架81上下移动,第八驱动件84带动传送带83转动。
44.第二升降移动结构90包括第九驱动件91、第三安装板92、第十驱动件93以及转轮94。第九驱动件91固定于工作台20,第九驱动件91的输出端与第三安装板92连接并带动第三安装板92上下移动。第十驱动件93固定于第三安装板92,转轮94转动安装于第三安装板92,第十驱动件93带动转轮94转动。转轮94上套设有皮带。
45.使用灭机设备时,载具从第一进出口11进入,移动至输送结构40上,笔记本电脑200放置在载具上。第一个输送结构40以及机器人30、第一定位结构50、第二定位结构60以及第三定位结构70组成灭机工位。两第二驱动件51带动滚轮52移动抵触笔记本电脑200,使笔记本电脑200在垂直于输送的方向定位。第二定位结构60驱动第一夹爪64移动以夹持笔记本电脑200一侧,第三定位结构70驱动第二夹爪74移动以夹持笔记本电脑200另一侧,使笔记本电脑200在沿输送的方向定位。机器人30的机械臂32控制位置获取结构35的相机351拍照以获取电源接口的位置信息,插拔结构34与电源接口插接给笔记本电脑200供电,按压
结构33按压笔记本电脑200使笔记本电脑200关机。插拔结构34与电源接口分离,笔记本电脑200沿输送结构40在第一方向移动,直至移动至第一升降移动结构80上,第一升降移动结构80带动笔记本电脑200继续沿第一方向移动,直至位于另一输送结构40上方,此时第一升降移动结构80下降,使另一输送结构40托住载具,另一输送结构40带动笔记本电脑200沿垂直于第一方向的第二方向移动,同时形成缓存工位。笔记本电脑200沿第二方向移动至末端时,第二升降移动结构90驱动皮带升起,托住载具,带动笔记本电脑200继续沿第一方向移动。
46.在整个产线上,使用完的空载具沿工作台20下方的回流产线回流至产线前端进行重复使用。
47.以上实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进演变,都是依据本发明实质技术对以上实施例做的等同修饰与演变,这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1