一种基于视觉的吊装用工程机械的制作方法
1.本发明涉及吊装用工程机械,特别涉及一种基于视觉的吊装用工程机械。
背景技术:
2.随着经济发展,产品由以前的粗放型向精细型转变,高技术、高质量、高精度的产品需求比例显著增加,传统的粗放的生产车间以及生产方式逐渐的无法满足人们对高质量产品的需求,高质量的产品需要高精密的设备进行生产;
3.生产车间内,有大量需要用到吊装的场景,传统的吊装设备紧起到搬运的作用,需要人员去配合定位等,这其中吊装效率低,而且智能化程度不高,浪费人力,因此需要一种高精度、自动化程度高的吊装工程机械来满足目前的精益生产方式。
技术实现要素:
4.发明目的:为了克服现有技术中存在的不足,本发明提供一种能够实现精确定位的基于视觉的吊装用工程机械。
5.技术方案:为实现上述目的,本发明的基于视觉的吊装用工程机械,包括支撑模块、移动模块以及抓取模块;
6.所述移动模块设置在所述支撑模块上;
7.所述抓取模块设置在所述移动模块上,所述移动模块能够带动所述抓取模块运动;
8.所述抓取模块用于吊装抓取,其上设置有视觉识别模块。
9.进一步地,所述移动模块包括水平运动模块、竖直运动模块以及旋转支撑模块;
10.所述水平运动模块包括相互垂直放置的第一运动单元以及第二运动单元;所述第二运动单元设置在所述第一运动单元的移动端;
11.所述第一运动单元以及所述第二运动单元均由同步带传动;
12.所述竖直运动模块设置在所述第二运动单元的移动端,用于带动所述抓取模块沿竖直方向移动;
13.所述旋转支撑模块用于驱动所述抓取模块绕竖直轴做旋转运动。
14.进一步地,所述竖直运动模块包括固定座、第一驱动元件、第一固定筒以及第二固定筒;
15.所述第一驱动元件固定设置在所述固定座上,所述一驱动元件的转轴与驱动轮固定连接,所述驱动轮上设置有与所述第二固定筒连接的钢丝绳;
16.所述第一驱动元件通过钢丝绳拉动所述第二固定筒相对所述第一固定筒做升降运动;
17.所述第一固定筒与所述第二固定筒之间设置有周向限位装置;
18.所述第一固定筒通过旋转支撑模块与所述固定座转动连接。
19.进一步地,所述旋转支撑模块包括相互啮合的第一齿轮以及第二齿轮;
20.所述第一齿轮转动连接在所述固定座上,所述第一固定筒与所述第一齿轮固定连接;
21.所述第二齿轮与第二驱动元件的转轴固定连接,所述第二驱动元件固定设置在所述固定座上。
22.进一步地,所述第一齿轮内侧一周开设有第二凹槽,所述旋转支撑模块还包括多个圆周阵列设置的与所述第二凹槽配合的轴承,所述轴承通过固定轴与所述固定座连接。
23.进一步地,所述抓取模块包括基座、转盘、视觉识别模块、第三驱动元件以及能做相对开合运动的夹爪组件;
24.所述基座固定连接在所述第二固定筒的下底面;所述转盘转动连接在所述基座的中心;
25.所述第三驱动元件能够驱动所述转盘相对所述基座转动;
26.所述转盘能够带动所述夹爪组件做开合运动。
27.进一步地,所述夹爪组件包括多个圆周阵列的夹爪,其阵列轴心与所述转盘轴心重合;每个所述夹爪均可相对所述基座沿转盘的径向方向滑动。
28.进一步地,所述转盘上设置有与所述夹爪数量相等且一一对应的滑槽;所述夹爪上设置有与所述滑槽滑动配合的轴承;所述轴承延所述滑槽滑动时,能够带动所述夹爪相对基座滑动。
29.进一步地,所述视觉识别模块通过固定架固定设置在所述基座的中心;所述视觉识别模块包括光源以及设置在所述光源中间的视觉相机。
30.有益效果:本发明的基于视觉的吊装用工程机械,应用视觉相机扫描物品上的二维码进行定位,其定位精确,为高度智能化的精确的吊装用工程机械,适用于高精密加工车间,大大的提高了生产效率,节约了搬运成本。
附图说明
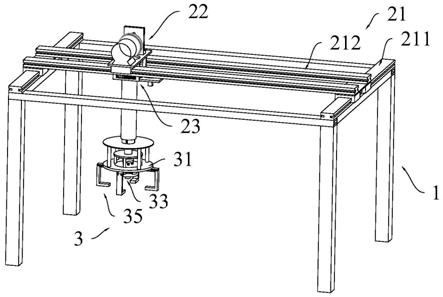
31.图1为基于视觉的吊装用工程机械整体视图;
32.图2为竖直运动模块以及旋转支撑模块局部视图;
33.图3为驱动轮、直线驱动元件与止动销之间的关系图;
34.图4为基于视觉的吊装用工程机械局部剖视图;
35.图5为旋转支撑模块局部剖视图;
36.图6为第一齿轮剖面视图;
37.图7为基座、转盘视图;
38.图8为夹爪正视图;
39.图9为抓取模块第一状态剖视图;
40.图10为抓取模块第二状态剖视图。
41.附图中各附图标记表示的零部件名称如下:
42.支撑模块1、移动模块2、抓取模块3、水平运动模块21、竖直运动模块22、旋转支撑模块23、第一运动单元211、第二运动单元212、固定座221、第一驱动元件222、第一固定筒223、凸起223-1、第二固定筒224、第一凹槽224-1、驱动轮225、销孔225-1、钢丝绳226、直线驱动元件227、止动销228、第一齿轮231、第二齿轮232、第二驱动元件233、第二凹槽231-1、
轴承234、固定轴235、基座31、转盘32、滑槽32-1、视觉识别模块33、第三驱动元件34、夹爪组件35、传动组件36、夹爪351、滚轮351-1、第一传动元件361、斜齿361-1、第二传动元件362、斜槽362-1、锁轴362-2、弹性元件363。
具体实施方式
43.下面结合附图对本发明作更进一步的说明。
44.如附图1所示的基于视觉的吊装用工程机械,主要用于对生产车间内的物品进行吊装,该吊装设备安装有视觉定位识别模块,能够自动识别物品上的二维码,确定该物品的准确位置,进行自动抓取完成吊装工作。该吊装设备包括支撑模块1、移动模块2以及抓取模块3;所述支撑模块1是由钢型材焊接而成,其结构牢靠,用于承重,且加工成本低;所述移动模块2设置在所述支撑模块1的顶部;所述抓取模块3设置在所述移动模块2上,所述移动模块2能够带动所述抓取模块3运动;所述抓取模块3用于吊装抓取,其上设置有视觉识别模块33,被吊装的物品上有二维码,视觉识别模块33通过扫取二维码确定物品的精确的位置,为吊装设备提供位置信息。
45.优选地,所述移动模块2包括水平运动模块21、竖直运动模块22以及旋转支撑模块23;所述水平运动模块21包括相互垂直放置的第一运动单元211以及第二运动单元212;所述第二运动单元212设置在所述第一运动单元211的移动端;所述第一运动单元211以及所述第二运动单元212均由同步带传动;如图2所示,所述竖直运动模块22设置在所述第二运动单元212的移动端,用于带动所述抓取模块3沿竖直方向移动;所述旋转支撑模块23用于驱动所述抓取模块3绕竖直轴做旋转运动。本实施例中,抓取模块3在移动模块2的带动下能够实现三个方向的自由移动,以及绕竖直轴的旋转运动,其具有很好的运动自由度,能够适应更多的吊装场景。
46.优选地,如图2-4所示,所述竖直运动模块22包括固定座221、第一驱动元件222、第一固定筒223以及第二固定筒224;所述第一驱动元件222固定设置在所述固定座221上,所述第一驱动元件222的转轴与驱动轮225固定连接,所述驱动轮225上设置有与所述第二固定筒224连接的钢丝绳226;所述第一驱动元件222通过钢丝绳226拉动所述第二固定筒224相对所述第一固定筒223做升降运动;所述固定座221上还设置有直线驱动元件227,所述直线驱动元件227上设置有止动销228,所述驱动元件227能够驱动所述止动销228做伸缩运动,所述驱动轮225的端面上圆周阵列设置有多个与所述止动销228配合的销孔225-1;本实施例中,所述第一驱动元件222通过带动所述第二固定筒224上升或下降到指定位置后,第一驱动元件222停止运动,此时驱动元件227驱动所述止动销228伸出,此时止动销228刚好能够伸入到一个销孔225-1,将所述驱动轮225锁住,即可确保第二固定筒224不再运动。
47.优选地,所述第一固定筒223与所述第二固定筒224之间设置有周向限位装置,所述第一固定筒223通过旋转支撑模块23与所述固定座221转动连接,所述第一固定筒223内壁设置有沿轴向延伸的条状凸起223-1,所述第二固定筒224外壁设置有与所述条状凸起223-1配合的第一凹槽224-1,该结构能够保证第一固定筒223相对第二固定筒224周向固定,即可保证第一固定筒223旋转时,第二固定筒224能够与之同步转动。
48.优选地,如图5所述,所述旋转支撑模块23包括相互啮合的第一齿轮231以及第二齿轮232;所述第一齿轮231转动连接在所述固定座221上,所述第一固定筒223与所述第一
齿轮231固定连接;当第一齿轮231旋转时,第一固定筒223也能随之旋转;所述第二齿轮232与第二驱动元件233的转轴固定连接,所述第二驱动元件233固定设置在所述固定座221上;第二驱动元件233通过第二齿轮232驱动第一齿轮231旋转,进而带动第一固定筒223旋转。
49.优选地,如图6所示,所述第一齿轮231内壁一周开设有第二凹槽231-1,所述旋转支撑模块23还包括多个圆周阵列设置的与所述第二凹槽231-1配合的轴承234,所述轴承234通过固定轴235与所述固定座221连接;该实施例中,所述轴承234对第一齿轮231起到旋转支撑的作用,减少了第一齿轮231转动过程中的摩擦力,该结构可代替成本很高的回转支撑轴承,使用很少的成本实现了对第一齿轮231的回转支撑作用,技术效果显著。
50.优选地,如图9所示,所述抓取模块3包括基座31、转盘32、视觉识别模块33、第三驱动元件34以及能做相对开合运动的夹爪组件35;所述基座31固定连接在所述第二固定筒214的下底面;所述转盘32转动连接在所述基座31的中心;所述第三驱动元件34能够驱动所述转盘32相对所述基座31转动;所述转盘32能够带动所述夹爪组件35做开合运动。
51.优选地,如图7-9所示,所述夹爪组件35包括多个圆周阵列的夹爪351,其阵列轴心与所述转盘32轴心重合,每个所述夹爪351均可相对所述基座31沿转盘32的径向方向滑动;所述夹爪351的端部为l型,当所述夹爪351向所述转盘32的圆心靠近时,所述l型的端部刚好能够嵌入到待吊装物品的吊装接口处,此时夹爪组件35能够牢靠将待吊装物品抓起。
52.优选地,如图7所示,所述转盘32上设置有与所述夹爪351数量相等且一一对应的滑槽32-1;所述夹爪351上设置有与所述滑槽32-1滑动配合的滚轮351-1;所述滚轮351-1延所述滑槽32-1滑动时,所述夹爪能相对所述基座31沿所述转盘32的径向方向移动。
53.优选地,如图9所示,所述第三驱动元件34与所述转盘32之间通过传动组件36连接,所述传动组件36包括相互配合的第一传动元件361、第二传动元件362;所述第一传动元件361与所述第三驱动元件34的转轴固定连接;所述第二传动元件362上具有多个与所述转盘32滑动配合的锁轴362-2,所述锁轴362-2能够使所述第二传动元件362相对所述转盘32的周向定位;所述锁轴362-2与所述滑槽32-1的数量相等且一一对应,所述锁轴362-2能够进出所述滑槽32-1;所述第一传动元件361的端面沿圆周设置有多个斜齿361-1,所述第二传动元件362上设置有多个与所述斜齿361-1配合的斜槽362-1,所述斜齿361-1能够进出所述斜槽362-1,其相对运动时,所述第二传动元件362能够带动所述锁轴362-2进出所述滑槽32-1;所述第二传动元件362与所述转盘32之间设置有弹性元件363,所述弹性元件363有使所述第二传动元件362向远离所述转盘32的方向运动的趋势。
54.本实施例中,当所述抓取模块3需要抓取待吊装的物品时,初始状态如图9所示,夹爪组件35处于张开状态;当需要抓取物品时,所述第三驱动元件34启动,并带动所述传动组件36旋转,由于第二传动元件362与转盘32之间设置有弹性元件363,所以第二传动元件362只做旋转运动,不上下移动;此时转盘32在第二传动元件362的带动下相对基座31旋转,进而转盘32带动夹爪351向转盘圆心靠近,当滚轮351-1运动到滑槽32-1的一端时,所述夹爪组件35闭合,将待吊装的物品抓住,此时,受到滚轮351-1限制,所述转盘32无法继续转动;第三驱动元件34还在继续转动,第一传动元件361的斜齿361-1滑出所述斜槽362-1,第二传动元件362克服弹性元件363的弹力,锁轴362-2进入到滑槽32-1内,将滚轮351-1挡住,第三驱动元件34停止运动,夹爪组件35由于受到锁轴362-2的阻挡,无法张开(如图10所示),该结构实现了不依靠第三驱动元件34的保持力矩仍然可以保持夹爪组件35的闭合状态,该结
构为机械锁死结构,稳定可靠。
55.优选地,所述视觉识别模块33通过固定架311固定设置在所述基座31的中心;所述视觉识别模块33包括光源331以及设置在所述光源331中间的视觉相机332。
56.优选地,以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1