一种仓储物流装货箱的自动装卸车的控制系统的制作方法
1.本发明涉及仓储物流技术领域,具体涉及一种仓储物流装货箱的自动装卸车的控制系统。
背景技术:
2.仓储物流,就是利用自建或租赁库房、场地、储存、保管、装卸搬运、配送货物。传统的仓储定义是从物资储备的角度给出的。现代“仓储”不是传统意义上的“仓库”、“仓库管理”,而是在经济全球化与供应链一体化背景下的仓储,是现代物流系统中的仓储。
3.而在仓储物流的运行过程中,因为需要存储和调用的货物种类繁多,并且形状各异,所以为了便于管理,通常都会将货物统一存放在固定尺寸的装货箱内部,并且通过装卸车来完成仓储物流装货箱的搬运。而为了提高工作效率,人工驾驶的装卸车也逐渐被淘汰,自动装卸车逐渐出现在各个仓储物流中。然而自动装卸车在应用过程中,常常存在数量众多的自动装卸车同时工作,在这种情况下,因为通行路线是固定不变的,所以有可能会出现多个自动装卸车需要排队经过同一个交通路口的情况。而常规的处理方式一般是按照自动装卸车到达该交通路口的时间来决定其通行的优先级,因此针对一些加急的仓储物流任务仍然需要经过长时间的排队,严重影响工作效率。
技术实现要素:
4.本发明的目的在于提供一种仓储物流装货箱的自动装卸车的控制系统,解决以下技术问题:
5.常规方式通信交通路口按照时间先后来决定通行顺序,无法应对一些较为紧急的物流运输任务。
6.本发明的目的可以通过以下技术方案实现:
7.一种仓储物流装货箱的自动装卸车的控制系统,任务接收模块,接收物流运输任务,分析所述的物流运输任务的重要程度,并根据所述的物流运输的重要程度设定所述的物流运输任务的任务优先级;
8.装卸执行模块,包括若干个自动装卸车,用于接收物流运输任务并分派自动装卸车对货物进行装卸和运输;
9.调度模块,在多辆自动装卸车在同一时间经过同一交通路口时,调取所述的自动装卸车所执行的物流运输任务,根据所述的物流运输任务的优先级设定多个所述的自动装卸车的通行顺序。
10.作为本发明进一步的方案:所述的调度模块具体包括:
11.检测单元,设置于各个交通路口,用于识别所述的交通路口是否处于拥堵状况,所述的拥堵状况为存在一辆或多辆处于等待状态下的自动装卸车,所述的等待状态为所述的自动装卸车停留在交通路口前,等待前车通行;
12.采集单元,采集处于拥堵状况下的交通路口处,正在停留等待的自动装卸车所执
行的物流运输任务的信息;
13.调整单元,获取所述的正在停留等待的自动装卸车的物流运输任务的优先级,按照优先级顺序设定多个所述的自动装卸车通行所述的交通路口的顺序。
14.作为本发明进一步的方案:当所述的处于拥堵状况的交通路口处,仅存在一辆处于等待状态的自动装卸车时,所述的自动装卸车自动获得最先通行所述的交通路口的权利。
15.作为本发明进一步的方案:当所述的处于拥堵状况的交通路口处,存在多个自动装卸车,其所执行的物流运输任务的优先级相同时,则按照多个所述的自动装卸车到达所述的交通路口的时间设定通行顺序,越早到达所述的交通路口的自动装卸车的通行顺序越靠前。
16.作为本发明进一步的方案:所述的任务接收模块具体包括:
17.接收单元,用于接收物流运输任务的具体信息,所述的物流运输任务的具体信息包括完成任务所需要的时间、最晚完成的时间和任务规模;
18.评级单元,根据所述的物流运输任务的具体信息,分析所述的物流运输任务的重要性和紧急程度,从而设定所述的物流运输任务优先级。
19.作为本发明进一步的方案:所述的调度模块具体包括:
20.分配单元,接收所述的物流运输任务并分匹配相应的自动装卸车执行所述的物流运输任务;
21.标记单元,设置任务编码,所述的任务编码至少包括所述的物流运输任务的优先级信息,并对所述的自动装卸车进行标记,所述的标记内容为任务编码。
22.作为本发明进一步的方案:所述的采集单元采集停留等待的自动装卸车的所执行的物流运输任务的信息的过程中,所述的所执行的物流运输任务的信息为标记在自动装卸车上的任务编码,从所述的任务编码中获取所述的自动装卸车正在执行的物流运输任务的优先级。
23.作为本发明进一步的方案:当所述的处于拥堵状况的交通路口处,存在多个自动装卸车,其所执行的物流运输任务的优先级相同并且到达所述的交通路口的时间也相同时,按照所述的自动装卸车的位置设定通行顺序,距离所述的交通路口越近的自动装卸车的通行顺序越靠前。
24.本发明的有益效果:通过对仓储物流系统中所接收到的各个物流运输任务并根据上述物流运输任务的重要性和紧急程度对其进行优先级的划分;并对仓库中的各个交通路口的拥堵情况进行采集,得知相关的交通路口的堵塞情况,并且通过分析停留在交通路口处的各个自动装卸车正在执行的物流运输任务的优先级来对各个自动装卸车的通行该交通路口的顺序进行科学的安排,从而避免常规或者不着急的物流运输任务阻挡了较为重要或者紧急的物流运输任务的执行,从而提高了工作效率。
附图说明
25.下面结合附图对本发明作进一步的说明。
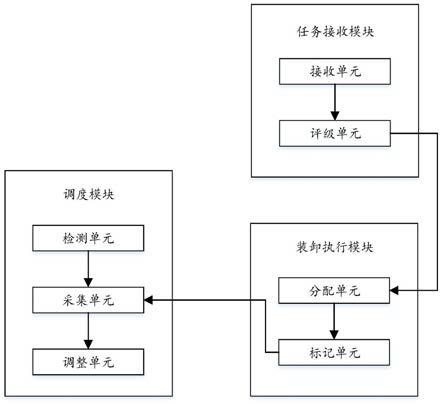
26.图1是本发明一种仓储物流装货箱的自动装卸车的控制系统的结构示意图。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
28.自动装卸车在应用过程中,常常存在数量众多的自动装卸车同时工作,在这种情况下,因为通行路线是固定不变的,所以有可能会出现多个自动装卸车需要排队经过同一个交通路口的情况。而常规的处理方式一般是按照自动装卸车到达该交通路口的时间来决定其通行的优先级,因此针对一些加急的仓储物流任务仍然需要经过长时间的排队,严重影响工作效率。
29.而在本技术中通过对仓储物流系统中所接收到的各个物流运输任务并根据上述物流运输任务的重要性和紧急程度对其进行优先级的划分;并对仓库中的各个交通路口的拥堵情况进行采集,得知相关的交通路口的堵塞情况,并且通过分析停留在交通路口处的各个自动装卸车正在执行的物流运输任务的优先级来对各个自动装卸车的通行该交通路口的顺序进行科学的安排,从而避免常规或者不着急的物流运输任务阻挡了较为重要或者紧急的物流运输任务的执行,从而提高了工作效率。
30.请参阅图1所示,本发明为一种仓储物流装货箱的自动装卸车的控制系统,包括:
31.任务接收模块,接收物流运输任务,分析所述的物流运输任务的重要程度,并根据所述的物流运输的重要程度设定所述的物流运输任务的任务优先级;
32.装卸执行模块,包括若干个自动装卸车,用于接收物流运输任务并分派自动装卸车对货物进行装卸和运输;
33.调度模块,在多辆自动装卸车在同一时间经过同一交通路口时,调取所述的自动装卸车所执行的物流运输任务,根据所述的物流运输任务的优先级设定多个所述的自动装卸车的通行顺序。
34.在本发明一种优选的实施例中,所述的调度模块具体包括:
35.检测单元,设置于各个交通路口,用于识别所述的交通路口是否处于拥堵状况,所述的拥堵状况为存在一辆或多辆处于等待状态下的自动装卸车,所述的等待状态为所述的自动装卸车停留在交通路口前,等待前车通行;
36.采集单元,采集处于拥堵状况下的交通路口处,正在停留等待的自动装卸车所执行的物流运输任务的信息;
37.调整单元,获取所述的正在停留等待的自动装卸车的物流运输任务的优先级,按照优先级顺序设定多个所述的自动装卸车通行所述的交通路口的顺序。
38.在本实施例的一种情况中,当所述的处于拥堵状况的交通路口处,仅存在一辆处于等待状态的自动装卸车时,所述的自动装卸车自动获得最先通行所述的交通路口的权利。
39.可以理解的是,在上述情况下,不存在其他自动装卸车与其争抢,因此该自动装卸车必然处于通行顺序中的第一位。
40.在本实施例的另一种情况中,当所述的处于拥堵状况的交通路口处,存在多个自动装卸车,其所执行的物流运输任务的优先级相同时,则按照多个所述的自动装卸车到达
所述的交通路口的时间设定通行顺序,越早到达所述的交通路口的自动装卸车的通行顺序越靠前。
41.在对于同一个物流运输任务来说,其所需要分配的自动装卸车往往不止一辆,因此针对同一物流运输任务下的多辆自动装卸车来说,它们的优先级都是一样的,因此按照到达所述的交通路口的时间来设定通行顺序,此处值得注意的是,也可将停留在同一交通路口的若干个优先级相同的若干个自动装卸车看成一个整体;另外,对于不同的物流运输任务来说,也有可能会存在两个不同的物流运输任务的优先级是相同的,在面临这种情况时,处理方法同上。
42.在本发明另一种优选的实施例中,所述的任务接收模块具体包括:
43.接收单元,用于接收物流运输任务的具体信息,所述的物流运输任务的具体信息包括完成任务所需要的时间、最晚完成的时间和任务规模;
44.评级单元,根据所述的物流运输任务的具体信息,分析所述的物流运输任务的重要性和紧急程度,从而设定所述的物流运输任务优先级。
45.在本发明另一种优选的实施例中,所述的调度模块具体包括:
46.分配单元,接收所述的物流运输任务并分匹配相应的自动装卸车执行所述的物流运输任务;
47.标记单元,设置任务编码,所述的任务编码至少包括所述的物流运输任务的优先级信息,并对所述的自动装卸车进行标记,所述的标记内容为任务编码。
48.在本实施例的一种情况中,所述的采集单元采集停留等待的自动装卸车的所执行的物流运输任务的信息的过程中,所述的所执行的物流运输任务的信息为标记在自动装卸车上的任务编码,从所述的任务编码中获取所述的自动装卸车正在执行的物流运输任务的优先级。
49.可以理解的是,当所述的处于拥堵状况的交通路口处,存在多个自动装卸车,其所执行的物流运输任务的优先级相同并且到达所述的交通路口的时间也相同时,按照所述的自动装卸车的位置设定通行顺序,距离所述的交通路口越近的自动装卸车的通行顺序越靠前。
50.以上对本发明的一个实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1