一种矿用多传感器融合的智能皮带清扫装置的制作方法
1.本发明属于带式输送机清扫输送带技术领域,具体是一种矿用多传感器融合的智能皮带清扫装置。
背景技术:
2.带式输送机是煤矿运输的主要设备,例如主运输系统、巷道掘进及选煤厂等,因其铺设距离长,工作时间久,运输量大,运输的煤炭往往一部分会粘在输送带工作面上,造成输送带跑偏,加大运输带的运行阻力,加速输送带的磨损,因此有必要在带式输送机工作时清扫输送带表面。通常皮带机清扫器多布置在皮带机头部。由于皮带机头部空间及传统清扫器功能的限制,使物料粘附在皮带上,清扫效果不甚理想。皮带机在运行过程中,回程段由于皮带跳动,造成整个皮带机廊道粉尘污染严重,影响安全生产与人员健康;同时皮带工作面及非工作面带煤易造成驱动间、拉紧间粉尘浓度升高,遇煤带水量较大时,极易出现拉紧滚筒处积煤,清理难度大,而带入量过大时极易产生皮带跑偏,甚至皮带撕裂现象,存在重大的安全隐患。
3.目前市场上使用的清扫器的预紧力形式多为重力式和弹簧式,重力式其体积较大,弹簧式随着刮板的磨损,预紧力会逐渐减少,否则清扫效果变差。在矿井下面由于安装空间有限,而且清扫器安装位置的不同,调整张紧力弹簧时就会困难,造成人员劳动强度增加,安全性降低。在公开号为cn103787054a的中国专利文献中,提出了一种带式输送机液压恒力矩重段清扫器,具体而言,清扫块组件与旋转机构连接在一起,旋转机构通过连杆与液压缸活塞杆连接,液压缸活塞腔通过胶管与蓄能器连接,用来补偿活塞腔的压力。上述发明中,液压缸通过胶管和蓄能器连接在一起组成的液压系统,实际上构成了一个油气弹簧。油气弹簧具有非线性的位移力关系,而且输出力特性随着油缸运动、蓄能器内气体状态变化、环境温度变化等都会产生变化,因此并不能保证清扫块和胶带的压紧力恒定。在公开号为cn106144505ba的中国专利文献中,提出了一种带自动补偿预紧力功能的清扫器,增加了一套液压系统和电气系统,实现了该功能,这种方式可以实现清扫器的预紧力的恒定,只能实现自动补偿功能,无法识别皮带上的物料。
技术实现要素:
4.本发明为了解决上述问题,提供一种矿用多传感器融合的智能皮带清扫装置。
5.本发明采取以下技术方案:一种矿用多传感器融合的智能皮带清扫装置,包括红外传感器、光学传感器、安装架、风刀组件以及刮刀组件,安装架安装在皮带一侧,红外传感器通过安装架固定在皮带上表面的上方用于监测皮带的煤泥情况,刮刀组件、光学传感器以及风刀组件通过安装架固定在皮带下表面的下方,其中刮刀组件固定在安装架前端上的连接板上,连接板上一端电动缸连接,电动缸的另一端与拉力传感器连接,拉力传感器的另一端固定到安装架上,光学传感器固定在安装架中部,用于监测刮刀清洁之后的情况,风刀组件安装在安装架后端,电磁阀组布置在风刀组件前,用于控制水管和风管的启闭,电控箱
布置与安装架外侧,控制刮刀组件电动缸的伸缩,以及电磁阀组的启闭。
6.进一步的,刮刀组件包括多组错落布置的刮刀片,刮刀片顶部抵在皮带下表面上,多组刮刀片固定安装在固定架上,固定架底部两侧与电动缸连接。
7.进一步的,风刀组件包括水管、风管以及具有多级喷口的管件,水管和风管与具有多级喷口的管件连接,由电磁阀组控制管件的喷口的开启。
8.进一步的,安装架包括三层,最上面一层用于布置红外传感器,第二层布置风刀组件和电磁阀组,第三层布置刮刀组件以及电动缸。
9.一种矿用多传感器融合的智能皮带清扫装置的使用方法,包括以下步骤,s100~首先使用红外传感器监测皮带煤泥情况,然后将信号传递给电控箱,如果皮带上存在煤泥时,会遮挡传感器发射出的红外光,反射板接受不到,并会传递出有煤泥存在情况,电控箱主控器控制电动缸上升,以此来控制刮刀组件进行清洁工作。
10.s200~当需要刮刀组件进行清洁工作时,电控箱控制电动缸上升,与滚筒皮带接触,此时拉力传感器可以读出此时的接触力数值,并实时反馈给电控箱的数据处理模块,与试验得出的理想接触力比较,通过pid调节,直到与设定阈值相同,进行清洁工作。
11.s300~光学传感器监测刮刀组件工作之后的情况,通过视觉识别皮带上是否仍然存在大块的煤泥时,便传递信息给电控箱并给控制电磁阀开启风刀组件,使得水雾化进一步的清洁皮带。
12.与现有技术相比,本发明采用多传感器融合的方式,利用红外传感器监测皮带情况,自动控制刮刀组件的工作,利用力传感器自动调整刮刀与皮带之间的预紧力,使得刮刀组件更好的工作。刮刀组件之后布置风刀组件,利用光学传感器控制高压水雾,对皮带进一步的清理,提高清扫效率,通过井下网络可对整套装置进行远程监控与控制,降低了人员劳动强度,增加了安全性及矿井的智能化水平。
附图说明
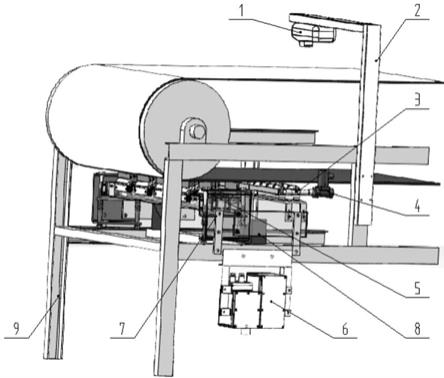
13.图1为本发明的结构示意图;图2为本发明的刮刀组件和风刀组件的示意图;图3为本发明的风刀组件示意图;图4为本发明实施例提供的风刀组件分级水管示意图;图中,1-红外传感器,2-安装架,3-风刀组件,4-电磁阀,5-刮刀组件,6-电控箱,7-电动缸,8-光学传感器,9-滑动螺栓,10-管件,11-水管,12-风管,13-拉力传感器,14-支座,15-固定架,16-刮刀片。
具体实施方式
14.为使本发明实施例的目的、技术方案和优点更加清楚,下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例;基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
15.如图1、2所示,一种矿用多传感器融合的智能皮带清扫装置,包括红外传感器1、光学传感器8、安装架2、电磁阀4、电控箱6、风刀组件3以及刮刀组件5,安装架2安装在皮带一
侧,红外传感器1通过安装架2固定在皮带上表面的上方用于监测皮带的煤泥情况,刮刀组件5、光学传感器8以及风刀组件3通过安装架2固定在皮带下表面的下方,其中刮刀组件5固定在安装架2前端上的连接板上,连接板上一端与电动缸7连接,电动缸7的另一端与拉力传感器12连接,拉力传感器12的另一端固定到安装架2上,光学传感器8固定在安装架2中部,用于监测刮刀清洁之后的情况,风刀组件3安装在安装架2后端。电磁阀组4布置在风刀组件前,用于控制水管和风管的启闭,电控箱6布置与安装架2外侧,是整个系统的控制核心,控制刮刀组件电动缸的伸缩,以及电磁阀的启闭。
16.刮刀组件5包括多组错落布置的刮刀片15,刮刀片15顶部抵在皮带下表面上,多组刮刀片15固定安装在固定架14上,固定架14底部两侧与电动缸7连接。
17.如图3、4所示,风刀组件3包括水管11、风管12以及具有多级喷口的管件,水管11和风管12与具有多级喷口的管件10连接,由电磁阀组4控制喷口10的开启,在水管11和风管12共同作用,可以使得喷口10喷出的水雾化,增大清洁度。
18.安装架2可以分为三层,最上面一层用于布置红外传感器1,第二层布置风刀组件3和电磁阀组4等,第三层布置刮刀组件5以及电动缸7,其他零部件安置于安装架外侧,如电控箱6等,另外安装架2需要与采煤机滚动相适应。
19.一种矿用多传感器融合的智能皮带清扫装置的使用方法,包括以下步骤:s100~首先使用红外传感器1监测皮带煤泥情况,然后将信号传递给电控箱6,如果皮带上存在煤泥时,会遮挡传感器发射出的红外光,反射板接受不到,并会传递出有煤泥存在情况,电控箱6主控器控制电动缸7上升,以此来控制刮刀组件5进行清洁工作;s200~当需要刮刀组件5进行清洁工作时,电控箱6控制电动缸7上升,与滚筒皮带接触,此时拉力传感器12可以读出此时的接触力数值,并实时反馈给电控箱6的数据处理模块,与试验得出的理想接触力比较,通过pid调节,直到与设定阈值相同,进行清洁工作。
20.s300~光学传感器8监测刮刀组件工作之后的情况,通过视觉识别皮带上是否仍然存在大块的煤泥时,便传递信息给电控箱6并给控制电磁阀4开启风刀组件3,使得水雾化进一步的清洁皮带。
21.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1