基于机器视觉的智能化鱼丸定数包装设备
1.本发明涉及鱼丸加工、包装相关技术领域,具体是一种基于机器视觉的智能化鱼丸定数包装设备。
背景技术:
2.鱼丸作为一种海鲜类丸子目前很受人们喜爱。现有市场上鱼丸为圆球形,多采用散装包装在袋内进行售卖。目前市面上,基于食品加工工艺的提高,高品质鱼丸在重量、大小、质量方面均有显著的提高,但是其包装方式仍是多采用称重散装包装的方式,即在每个包装袋内包装一定重量的鱼丸。但随着人们生活水平的提高以及对产品包装品质的要求,一些消费者目前更倾向于采购用包装盒定数包装的鱼丸。此类鱼丸包装盒采用塑料或其它材质,盒内具有一定数量的凹槽用于盛放鱼丸,然后再进行封装,显而易见,该种包装的鱼丸更方便人们的使用和存放。再者,目前市面上的可用微波炉加热即食的鱼丸,同样需采用包装盒定数包装的方式。
3.由于传统包装中,采用的是称重方式,将其应用于定数包装作业中,一方面结构复杂,工序比较繁琐,另一方面,不同于散装方式,难以对鱼丸进行排列摆放使鱼丸恰好能够包装到包装盒的凹槽内,因此,现有采用包装盒对鱼丸进行定数包装时,多为人工操作,其效率低,人力劳动强度大的缺点显而易见。
技术实现要素:
4.本发明的目的在于提供一种基于机器视觉的智能化鱼丸定数包装设备,本设备能够直接包装所需数量的鱼丸,且鱼丸从设备出来时与包装盒的凹槽对应,因此能够通过机械手将多个鱼丸直接放置到包装盒内,其在鱼丸的包装中,具有广阔的应用前景。
5.本发明的技术方案如下:
6.一种基于机器视觉的智能化鱼丸定数包装设备,包括主支架、料筒、分料箱、上落料盘、分料盘以及下落料盘;
7.其中,所述料筒固定安装于主支架上,用于承装鱼丸;
8.所述分料箱安装于料筒下方,分料箱底部周向均匀设有若干个落料管,分料箱用于使鱼丸进入至各落料管内,所述落料管管径被设置为仅可供一个鱼丸通过,使得各鱼丸在落料管内会沿落料管长度方向依次排队下落;
9.所述上落料盘固定连接于分料箱下方,上落料盘周向均匀设置若干个上落料通孔,上落料通孔分别与各落料管连通;
10.所述下落料盘安装于上落料盘下方,下落料盘周向均匀设置若干个与上落料通孔数量相同的下落料通孔,且若干个下落料通孔与上落料通孔之间依次交错布置;
11.所述分料盘设置于上落料盘以及下落料盘之间,分料盘周向均匀设置两倍于上落料通孔数量的分料通孔,所述分料通孔大小被设置为仅可容纳一个鱼丸,分料盘连接有能够驱动其转动的转动驱动组件,在所述分料盘转动过程中,当分料通孔与上落料通孔对齐
时,每个上落料通孔内的最底部鱼丸落入分料通孔内,当分料通孔与下落料通孔对齐时,分料通孔内的鱼丸落入下落料通孔内;
12.所述下落料盘下方对应每个下落料通孔安装有一个软管,落入下落料通孔内的鱼丸沿对应的软管下落,所述软管的出口端固定于一定位板上,通过所述定位板将多个软管的出口按照所需的样式排列。
13.进一步,所述分料箱呈漏斗式结构,分料箱内部通过多个隔板隔开为多个独立的容纳腔,每个容纳腔均为上大下小式结构,每个容纳腔底部设置有仅可供一个鱼丸落下的出料口,落料管对应安装于所述出料口处。
14.进一步,所述分料箱底部安装有搅拌电机,所述搅拌电机连接分料箱内的隔板,搅拌电机能够带动所述隔板小范围内往复摆动。
15.进一步,所述分料箱与料筒之间通过法兰盘和紧固件可拆卸连接,所述落料管为软质管。
16.进一步,所述下落料盘中心位置设置有一连接轴,所述分料盘通过轴承可转动的安装于所述连接轴上;
17.所述下落料盘和上落料盘之间通过螺纹杆、螺母连接,上落料盘、下落料盘之间间距可调。
18.进一步,所述转动驱动组件包括驱动轮、转动电机,所述驱动轮与分料盘之间通过传动带连接,所述转动电机连接所述驱动轮,转动电机固定于主支架一侧的电机支架上。
19.进一步,所述上落料盘下表面布置有多个气嘴,多个气嘴分别对应下落料通孔设置,在每个气嘴一侧设置一传感器。
20.进一步,本设备还包括机械臂组件,所述机械臂组件包括底座、立柱、机械臂,所述立柱安装于底座上,立柱连接有旋转驱动件,立柱周向均匀布置多个机械臂;
21.所述机械臂包括固定部、活动部以及机械手,所述固定部连接于所述立柱,所述活动部连接于固定部一侧且在翻转电机驱动下能够实现翻转,所述机械手安装于所述活动部一端,机械手包括有多个气动吸盘,多个气动吸盘的排列方式与多个软管出口的排列方式对应,在旋转驱动件作用下,机械臂转动能够使得气动吸盘移动至软管出口正下方。
22.进一步,所述固定部上还设有朝向机械手气动吸盘位置拍照的摄像头,所述摄像头用于采集气动吸盘上鱼丸的图像,并发送至处理器进行分析,判断是否存在鱼丸漏装现象。
23.进一步,所述气动吸盘上表面设置用于盛放鱼丸的凹槽。
24.本发明的有益效果:
25.1、本设备在运行过程中,鱼丸能够持续、自动、间隔下落,且一次性下落的鱼丸数量为设定的数量,因此能够对鱼丸数量进行精确的控制;下落后的设定数量的鱼丸通过设备底部的软管出口落出,而多个软管出口其排列位置可调整,因此,本设备能够控制落下的多个鱼丸的排列方式,将该排列方式设定为与包装盒内凹槽方式对应,能够极大的方便鱼丸的包装,可见,将本设备应用于需要定数盒包装的鱼丸包装作业中,能够显著提高作业效率,且设备整体结构简单,自动化程度高,易于维护,因此,能够很好的被推广应用。
26.2、本设备在实际使用过程中,如鱼丸数量或大小有所更改,设备只需更换料筒下方的部分零部件即可,而当需要改变包装盒样式而不改变鱼丸大小或数量时,仅需更换用
于软管出口位置固定的定位板以改变软管布置方式即可,因此,本设备具有极好的通用性以及可设定性。
27.3、本设备通过搅拌电机的设置,能够防止鱼丸在分料箱内堆积而导致难以排队进入落料管,通过气嘴以及传感器能够保证鱼丸的顺利下落,同时对鱼丸进行实时检测,避免漏装现象的发生。
28.4、本设备上落料盘、分料盘、下落料盘的连接方式,能够十分方便设备实际使用时的调试。
29.5、本设备同时配备了机械手,多个机械手依次交替作业,效率高,机械手移动到鱼丸出口位置时,多个鱼丸能够直接下落到机械手的吸盘上,通过机械手将鱼丸移动到包装盒位置,机械手下方,多个鱼丸即可自动下落到包装盒对应的凹槽内实现包装,其具有极好的智能化和很高的作业效率,同时,机械手处配置有视觉识别摄像头,能够再一次检测鱼丸数量,保证避免漏装现象。
附图说明
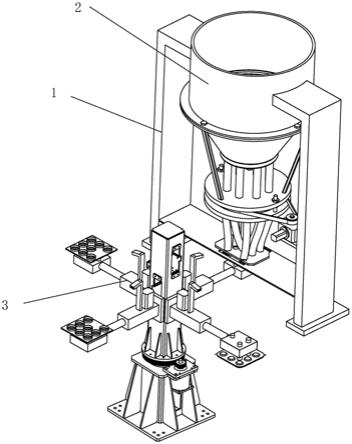
30.附图1为本发明总体结构示意图一;
31.附图2为本发明总体结构示意图二;
32.附图3为本发明去除机械手组件后总体结构示意图一;
33.附图4为本发明去除机械手组件后总体结构示意图二;
34.附图5为本发明去除机械手组件后总体结构示意图三;
35.附图6为本发明分料箱内部结构示意图;
36.附图7为本发明上落料盘、分料盘、下落料盘相关结构示意图一;
37.附图8为本发明上落料盘、分料盘、下落料盘相关结构示意图二;
38.附图9为本发明机械手组件相关结构示意图。
具体实施方式
39.下面结合具体实施例,进一步阐述本发明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所限定的范围。
40.如图1-9所示,为本发明实施例提供的一种基于机器视觉的智能化鱼丸定数包装设备相关结构示意图。
41.在本实施例中,本包装设备主要包括一个主支架1,在主支架1上固定设置一个料筒2,鱼丸被投放在料筒2中等待包装。在料筒2的下方连接有一个分料箱4,分料箱4通过法兰盘和紧固件与料筒2连接,以便于拆装。
42.分料箱4主要用于将料筒2内的鱼丸分割为多路下落。具体的,分料箱4底部周向均匀设有若干个落料管8,落料管8优先选用软质管,位于料筒2内的鱼丸可以通过分料箱4落入到各落料管8内部,其中落料管8的管径被设置为:仅可供一个鱼丸通过,即落料管的管径尺寸大于一个鱼丸的平均直径小于两个鱼丸的直径,如此,进入到落料管8内的鱼丸会在落料管8内沿落料管8长度方向依次排队下落。
43.在分料箱4的下方固定设置一个上落料盘5。其中,上落料盘5在其周向均匀设置若
干个上落料通孔21,上落料通孔21分别与各落料管8连通,即位于落料管8内的鱼丸会逐个通过上落料通孔21下落,上落料通孔21尺寸可与落料管8管径相等。在上落料盘5下方设置一个下落料盘7,下落料盘7的周向同样均匀设置若干个与上落料通孔21数量相同的下落料通孔23,且若干个下落料通孔23与上落料通孔21之间依次交错布置,即上落料通孔21与对应的多个下落料通孔23并不是同轴设置,而是交错设置。这使得上落料通孔21内的鱼丸并不会直接落入到下落料通孔23内。
44.在上落料盘5以及下落料盘7之间设置是一个用于过度的分料盘6,其中分料盘6周向均匀设置两倍于上落料通孔21数量的分料通孔22,(即,当上落料通孔21设置8个时,分料通孔22设置16个,当上落料通孔21设置9个时,分料通孔22设置18个)。且分料通孔22大小被设置为仅可容纳一个鱼丸,即分料通孔22尺寸大于一个鱼丸的平均直径,小于两个鱼丸的平均直径。上落料通孔21、分料通孔22、下落料通孔23它们所在的分度圆直径是相等的。分料盘6并不是固定不动的,而是连接有能够驱动其转动的转动驱动组件,具体的,在下落料盘7中间上部设置有一个连接轴24,分料盘6中间部位设置有一个通孔,分料盘6安装在该连接轴24上并设置有轴承,如此使得分料盘6能够自由转动。用于驱动分料盘6转动的转动驱动组件可以采用间歇驱动的方式,一次让分料盘6移动一个孔位的距离,也可以采用连续驱动的方式,使分料盘6持续缓慢转动。转动驱动组件主要由驱动轮12、转动电机11、传动带13组成,转动电机11安装在与主支架1连接的电机支架上,转动电机11带动驱动轮12转动,驱动轮12通过传动带13带动分料盘6转动。
45.在本实施例中,以所需包装的鱼丸数量为8个为例(图示也是8个为例)。落料管8设置8个,上落料通孔21、下落料通孔23均设置8个,分料通孔22设置16个。本设备的工作原理为:鱼丸通过落料管8时,在落料管8内是依次累加逐个排队下落的状态,当启动转动电机11时,分料盘6会转动,转动过程中,当分料盘6上的其中8个分料通孔22与上落料通孔21对齐时,由于分料通孔22仅能容纳一个鱼丸,而分料盘6与上落料盘5之间的间隙也较小,因此,每个上落料通孔21内,只有最底部的那个鱼丸才会进入到下方的分料盘6内,此时,分料盘6的分料通孔22内分别有一个鱼丸,随着分料盘6的继续转动,当分料通孔21离开上落料通孔21对应位置时,由于分料盘6的上表面格挡作用,上落料通孔21内的鱼丸不会掉落直至下一个分料通孔22与其对齐,而由于下落料盘7上表面的格挡,位于分料通孔21内的鱼丸也不会掉落至外部,直至随分料盘6旋转至带有鱼丸的8个分料通孔22与下落料通孔23对齐时,这8个鱼丸会掉落至下落料通孔23内,而此时,其余8个分料通孔21恰好与8个上落料通孔21对齐,如此形成循环,那么当分料盘6每转动一个孔位时,会有8个鱼丸掉落至下落料通孔23内,如此实现鱼丸的持续间隔定量下落。
46.在本实施例中,下落料盘7的下方对应每个下落料通孔23安装有一个软管9,落入下落料通孔23内的鱼丸沿对应的软管9下落,且软管9的出口端固定在一个定位板10上,定位板10固定在与主支架1连接的横板20上。通过该定位板10能够将多个软管9的出口按照所需的样式排列。其中所需的样式指的是与包装盒中凹槽位置对应的样式,如图5所示,软管9出口为8个,分为三排,其中外侧两排为3个,中间一排为2个,那么从软管9出口出来的8个鱼丸也是呈两侧均为3个,中间为2个状态,包装盒的凹槽同样是这个结构,那么落下的8个鱼丸则恰好可以对应包装盒的凹槽,以方便鱼丸的包装。由于采用的是软管9结构,其可以采用任意方式进行布置,因此,不会局限于包装盒的状态,故,本设备具有极好的通用性。上述
结构中,每次由软管9出来的鱼丸为8个,可直接落入包装盒内,也可通过机械手方便的实现中转。与本装置配套的机械手结构将在后续实施例进一步说明。
47.作为优选,在本实施例中,分料箱4采用漏斗式结构,即上部较大而下部较小,其内部通过多个隔板14隔开为多个独立的容纳腔15,本实施例中,容纳腔15具体设置数量为8个,每个容纳腔15均为上大下小式结构,方便鱼丸的下落,每个容纳腔15底部设置有仅可供一个鱼丸落下的出料口16,落料管8对应安装于对应出料口16底部。上述结构能够使得鱼丸逐个排队落入到出料口16内进而逐个进入到落料管8。同时为了避免鱼丸在容纳腔15内挤压堵塞出料口16,本实施例,在分料箱4底部安装了搅拌电机17,搅拌电机17连接分料箱4内的隔板14,搅拌电机17可以定期带动隔板14小范围内往复摆动,以搅动容纳腔15内的鱼丸,使其顺利落入到出料口16内。
48.作为优选,为了方便实际作业过程中,对本设备的调试,本实施例在下落料盘7和上落料盘5之间设置为间隙可调的结构,使两者通过螺纹杆18、螺母19连接。调整间隙的目的,是为了保证上落料盘5与分料盘6之前具有一个合理的间隙,该间隙即不会使鱼丸漏出,也可以保证部分具有稍许尺寸偏差的鱼丸能够顺利进入到分料盘6的分料通孔22内。
49.作为优选,在本实施例中,上落料盘5下表面还布置有多个气嘴25,多个气嘴25分别对应下落料通孔23设置。气嘴25的设置,使得当分料通孔22与下落料通孔23对齐时,一方面在鱼丸的重力作用下鱼丸下落,另一方面在气嘴25气压作用下进一步保证鱼丸能够快速下落至下落料通孔23内,同时气压能够给鱼丸一个推力,增加其下落速度,再者气压可吹动下方的软管9晃动,进一步保证鱼丸的顺利下落。
50.同时,为了方面实时检测鱼丸,避免鱼丸的漏装,在每个气嘴25一侧设置一传感器26,当分料盘6转动时,分料通孔22通过各传感器26时,由传感器26检测每个分料通孔22内是否具有鱼丸,传感器可采用测距传感器或其它传感器实现,当出现漏丸现象时,设备报警,有作业人员进行检修。
51.为了保证鱼丸的包装效率,简化包装流程,本实施例还提供有一种配套使用的机械手结构,能够快速的将落下的定数的鱼丸移动到包装盒位置进行封装。如图9所示,机械臂组件包括底座27、立柱29、机械臂,其中立柱29安装于底座27上,立柱29连接有旋转驱动件28,立柱29周向均匀布置多个机械臂,通过旋转驱动件28带动立柱29转动,从而切换机械臂的工作位置。
52.如图9所示,机械臂包括固定部30、活动部31以及机械手32,其中,固定部30连接于所述立柱29,活动部31连接于固定部30一侧且在翻转电机34驱动下能够实现翻转,机械手32固定安装于活动部31一端,机械手32包括有多个气动吸盘33,气动吸盘33上表面具有凹槽用于盛放下落的鱼丸,凹槽底部连接气动吸嘴。在本实施例中,多个气动吸盘33的排列方式与多个软管9出口的排列方式对应。使用过程中,在旋转驱动件28作用下,机械臂转动至使得气动吸盘33移动至软管9出口正下方时,由软管9处掉落的鱼丸恰好都落入到气动吸盘33上,气动吸盘33将鱼丸吸附,随着机械臂工位的切换,带有鱼丸的机械臂移动到包装盒位置,然后启动该机械臂的翻转电机34,气动吸盘33随机械手翻转,鱼丸掉落至包装盒上进行封装,随后该机械臂的翻转电机34再次翻转使气动吸盘33复位等待进入工位,而上一机械臂此时已经移动到软管9下方等待鱼丸掉落,如此形成一个包装循环。
53.作为优选,为了进一步避免鱼丸漏装现象,本实施例中,在固定部30上还设有朝向
机械手气动吸盘33位置拍照的摄像头35,该摄像头35用于采集气动吸盘33上鱼丸的图像,并发送至处理器进行对比分析,进而根据图像判断是否存在鱼丸漏装现象,由于是对规则排列的鱼丸进行视觉检测,因此很容易实现,且几乎没有出错率。
54.综上,可见,通过本实施例提供的包装设备,能够实现鱼丸的定数落料、包装,且具有极高的包装效率,也能够避免鱼丸的漏装。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1