货物入库方法、系统、装置和设备与流程
本公开涉及仓储物流,尤其涉及一种货物入库方法、系统、装置和设备。
背景技术:
1、退货是一种常见的售后形式,退货货物入库过程是电商系统处理退货货物的关键环节。通常仓库的质检人员拿到退货货物并拆包、整理后,会对获取进行检查,并将检查合格的商品直接放入入库料箱中,不对货物进行区分,当入库料箱装满后,直接混箱入库。
2、现有技术中的入库方式存在货物混杂放置,管理不便的问题。
技术实现思路
1、本公开提供的货物入库方法、系统、装置和设备,能够将货物分类入库,优化退货货物的入库流程,降低仓库货物的管理难度。
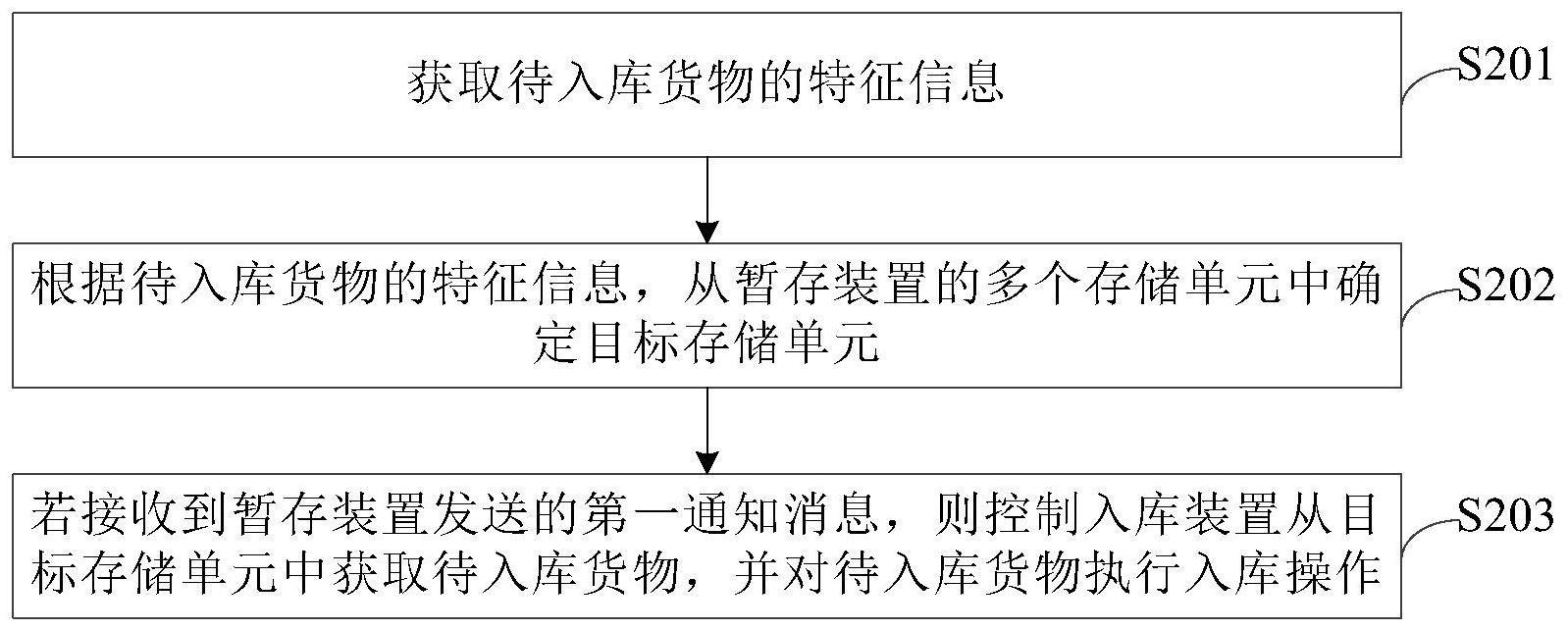
2、第一方面,本公开提供了一种货物入库方法,应用于控制设备,方法包括:获取待入库货物的特征信息;根据待入库货物的特征信息,从暂存装置的多个存储单元中确定目标存储单元,目标存储单元用于放置待入库货物;若接收到暂存装置发送的第一通知消息,则控制入库装置从目标存储单元中获取待入库货物,并对待入库货物执行入库操作,第一通知消息为暂存装置的目标装载量达到预设阈值时发送的。
3、可选地,根据待入库货物的特征信息,从暂存装置的多个存储单元中确定目标存储单元,包括:根据待入库货物的特征信息,以及预先存储的货物的特征信息与暂存装置的存储单元的标识信息之间的对应关系,确定目标存储单元的标识信息;根据目标存储单元的标识信息,控制暂存装置输出指示信息,指示信息用于指示待入库货物放置于目标存储单元中。
4、可选地,入库装置包括第一机器人,控制入库装置从目标存储单元中获取待入库货物,并对待入库货物执行入库操作,包括:控制第一机器人从目标存储单元中获取待入库货物,并对待入库货物执行入库操作。
5、可选地,入库装置还包括第二机器人和第三机器人;控制第一机器人从目标存储单元中获取待入库货物,并对待入库货物执行入库操作,包括:控制第二机器人将暂存装置搬运至工作台;若第一机器人从工作台对应的输送线上获取到第一料箱,则控制第一机器人将待入库货物从目标存储单元中取出,并放入第一料箱,第一料箱为标识信息与待入库货物的特征信息存在对应关系的料箱;控制第三机器人对第一料箱执行入库操作。
6、可选地,方法还包括:控制第三机器人获取空料箱,并放置于工作台对应的输送线上;建立并存储空料箱的标识信息和货物的特征信息之间的对应关系。
7、可选地,方法还包括:若第一机器人从工作台对应的输送线上获取到第一料箱,则控制暂存装置输出提示信息,提示信息用于提示待入库货物在暂存装置上所处的位置。
8、可选地,目标装载量包括目标存储单元的装载量,控制第一机器人从目标存储单元中获取待入库货物,并对待入库货物执行入库操作,包括:控制第一机器人将装有待入库货物的第二料箱从目标存储单元中取出,并对第二料箱执行入库操作。
9、可选地,目标装载量包括目标存储单元的装载量,入库装置还包括第四机器人;控制第一机器人从目标存储单元中获取待入库货物,并对待入库货物执行入库操作,包括:控制第一机器人将装有待入库货物的第二料箱从目标存储单元中取出,并放置于输送线上;控制第四机器人从输送线上获取第二料箱,并对第二料箱执行入库操作。
10、可选地,目标装载量包括暂存装置的总装载量,控制第一机器人从目标存储单元中获取待入库货物,并对待入库货物执行入库操作,包括:控制第一机器人将暂存装置各存储单元中的料箱逐一取出,并分别搬运至对应的目标位置,各料箱中包括装有待入库货物的料箱。
11、可选地,目标装载量包括暂存装置的总装载量,入库装置包括第四机器人;控制第一机器人从目标存储单元中获取待入库货物,并对待入库货物执行入库操作,包括:控制第一机器人将暂存装置各存储单元中的料箱逐一取出,并放置于输送线上,各料箱中包括装有待入库货物的料箱;控制第四机器人从输送线上取出各料箱,并将各料箱分别搬运至对应的目标位置。
12、可选地,入库装置还包括第二机器人;方法还包括:控制第二机器人将暂存装置搬运至输送线对应的工作站。
13、可选地,对待入库货物执行入库操作之后,还包括:控制第五机器人获取空料箱,并将空料箱放置于暂存装置中的空存储单元中;建立并存储空存储单元的标识信息与货物的特征信息之间的对应关系。
14、可选地,获取待入库货物的特征信息之前,还包括:获取多个货物的特征信息和多个存储单元的标识信息;建立并存储多个货物的标识信息和多个存储单元的标识信息之间的对应关系。
15、第二方面,本公开提供了一种货物入库系统,包括控制设备、暂存装置、入库装置,控制设备分别与暂存装置和入库装置通信连接;控制设备用于获取待入库货物的特征信息,根据待入库货物的特征信息,从暂存装置的多个存储单元中确定目标存储单元,目标存储单元用于放置待入库货物。
16、暂存装置用于在检测到暂存装置的目标装载量达到预设阈值时,向控制设备发送第一通知消息;
17、控制设备还用于在接收到第一通知消息后,控制入库装置从目标存储单元中获取待入库货物,并对待入库货物执行入库操作。
18、可选地,控制设备,具体用于根据待入库货物的特征信息,以及预先存储的货物的特征信息与暂存装置的存储单元的标识信息之间的对应关系,确定目标存储单元的标识信息;根据目标存储单元的标识信息,控制暂存装置输出指示信息,指示信息用于指示待入库货物放置于目标存储单元中。
19、可选地,入库装置包括第一机器人,控制设备,具体用于控制第一机器人从目标存储单元中获取待入库货物,并对待入库货物执行入库操作。
20、可选地,入库装置还包括第二机器人和第三机器人。
21、控制设备,具体用于控制第二机器人将暂存装置搬运至工作台。
22、第一机器人,具体用于从工作台对应的输送线上获取料箱,若第一机器人从工作台对应的输送线上获取到第一料箱,控制设备还用于则控制第一机器人将待入库货物从目标存储单元中取出,并放入第一料箱,第一料箱为标识信息与待入库货物的特征信息存在对应关系的料箱。
23、控制设备,还用于控制第三机器人对第一料箱执行入库操作。
24、可选地,控制设备,还用于控制第三机器人获取空料箱,并放置于工作台对应的输送线上。
25、控制设备,还用于建立并存储空料箱的标识信息和货物的特征信息之间的对应关系。
26、可选地,若第一机器人从工作台对应的输送线上获取到第一料箱,控制设备还用于控制暂存装置输出提示信息,提示信息用于提示待入库货物在暂存装置上所处的位置。
27、可选地,目标装载量包括目标存储单元的装载量,控制设备,具体用于控制第一机器人将装有待入库货物的第二料箱从目标存储单元中取出,并对第二料箱执行入库操作。
28、可选地,目标装载量包括目标存储单元的装载量,入库装置还包括第四机器人;控制设备,具体用于控制第一机器人将装有待入库货物的第二料箱从目标存储单元中取出,并放置于输送线上;控制第四机器人从输送线上获取第二料箱,并对第二料箱执行入库操作。
29、可选地,目标装载量包括暂存装置的总装载量,控制设备具体用于控制第一机器人将暂存装置各存储单元中的料箱逐一取出,并分别搬运至对应的目标位置,各料箱中包括装有待入库货物的料箱。
30、可选地,目标装载量包括暂存装置的总装载量,入库装置还包括第四机器人;控制设备,具体用于控制第一机器人将暂存装置各存储单元中的料箱逐一取出,并放置于输送线上,各料箱中包括装有待入库货物的料箱;控制第四机器人从输送线上取出各料箱,并将各料箱分别搬运至对应的目标位置。
31、可选地,入库装置还包括第二机器人;控制设备还用于控制第二机器人将暂存装置搬运至输送线对应的工作站。
32、可选地,控制设备,还用于控制第五机器人获取空料箱,并将空料箱放置于暂存装置中的空存储单元中。
33、控制设备还用于建立并存储空存储单元的标识信息与货物的特征信息之间的对应关系。
34、可选地,控制设备还用于获取多个货物的特征信息和多个存储单元的标识信息;建立并存储多个货物的标识信息和多个存储单元的标识信息之间的对应关系。
35、第三方面,本技术提供了一种货物入库装置,包括:
36、获取模块,用于获取待入库货物的特征信息。
37、处理模块,用于根据待入库货物的特征信息,从暂存装置的多个存储单元中确定目标存储单元,目标存储单元用于放置待入库货物;若接收到暂存装置发送的第一通知消息,则控制入库装置从目标存储单元中获取待入库货物,并对待入库货物执行入库操作,第一通知消息为暂存装置的目标装载量达到预设阈值时发送的。
38、可选地,处理模块,具体用于根据待入库货物的特征信息,以及预先存储的货物的特征信息与暂存装置的存储单元的标识信息之间的对应关系,确定目标存储单元的标识信息;根据目标存储单元的标识信息,控制暂存装置输出指示信息,指示信息用于指示待入库货物放置于目标存储单元中。
39、可选地,入库装置包括第一机器人,处理模块,具体用于控制第一机器人从目标存储单元中获取待入库货物,并对待入库货物执行入库操作。
40、可选地,入库装置还包括第二机器人和第三机器人,处理模块,具体用于控制第二机器人将暂存装置搬运至工作台;若第一机器人从工作台对应的输送线上获取到第一料箱,则控制第一机器人将待入库货物从目标存储单元中取出,并放入第一料箱,第一料箱为标识信息与待入库货物的特征信息存在对应关系的料箱;控制第三机器人对第一料箱执行入库操作。
41、可选地,处理模块,还用于控制第三机器人获取空料箱,并放置于工作台对应的输送线上;建立并存储空料箱的标识信息和货物的特征信息之间的对应关系。
42、可选地,处理模块,还用于若第一机器人从工作台对应的输送线上获取到第一料箱,则控制暂存装置输出提示信息,提示信息用于提示待入库货物在暂存装置上所处的位置。
43、可选地,目标装载量包括目标存储单元的装载量,处理模块,具体用于控制第一机器人将装有待入库货物的第二料箱从目标存储单元中取出,并对第二料箱执行入库操作。
44、可选地,目标装载量包括目标存储单元的装载量,入库装置还包括第四机器人;处理模块,具体用于控制第一机器人将装有待入库货物的第二料箱从目标存储单元中取出,并放置于输送线上;控制第四机器人从输送线上获取第二料箱,并对第二料箱执行入库操作。
45、可选地,目标装载量包括暂存装置的总装载量,处理模块,具体用于控制第一机器人将暂存装置各存储单元中的料箱逐一取出,并分别搬运至对应的目标位置,各料箱中包括装有待入库货物的料箱。
46、可选地,目标装载量包括暂存装置的总装载量,入库装置还包括第四机器人;处理模块,具体用于控制第一机器人将暂存装置各存储单元中的料箱逐一取出,并放置于输送线上,各料箱中包括装有待入库货物的料箱;控制第五机器人从输送线上取出各料箱,并将各料箱分别搬运至对应的目标位置。
47、可选地,入库装置还包括第二机器人;处理模块,还用于控制第二机器人将暂存装置搬运至输送线对应的工作站。
48、可选地,处理模块,还用于控制第五机器人获取空料箱,并将空料箱放置于暂存装置中的空存储单元中;建立并存储空存储单元的标识信息与货物的特征信息之间的对应关系。
49、可选地,获取模块,还用于获取多个货物的特征信息和多个存储单元的标识信息;建立并存储多个货物的标识信息和多个存储单元的标识信息之间的对应关系。
50、第四方面,本公开提供一种电子设备,包括:至少一个处理器;以及与至少一个处理器通信连接的存储器;其中,存储器存储有可被至少一个处理器执行的指令,指令被至少一个处理器执行,以使至少一个处理器能够执行如第一方面及其可选方式所提供的方法。
51、第五方面,本公开提供了一种计算机可读存储介质,计算机可读存储介质中存储有计算机执行指令,计算机执行指令被处理器执行时用于实现如第一方面或第一方面的可选方式的方法。
52、第六方面,本公开提供了一种计算机程序产品,包括计算机程序/指令,该计算机程序/指令被处理器执行时实现如第一方面或第一方面的可选方式的方法。
53、本公开提供的货物入库方法、系统、装置和设备,通过获取待入库货物的特征信息;根据待入库货物的特征信息,从暂存装置的多个存储单元中确定目标存储单元,目标存储单元用于放置待入库货物;若接收到暂存装置的目标装载量达到预设阈值时发送的第一通知消息,则控制入库装置从目标存储单元中获取待入库货物,并对待入库货物执行入库操作,能够将货物分类入库,优化退货货物的入库流程,降低仓库货物的管理难度。
- 还没有人留言评论。精彩留言会获得点赞!