一种花卉盆栽的摆放机构及摆放方法
1.本发明涉及一种园林景观,尤其涉及一种花卉盆栽的摆放机构及摆放方法。
背景技术:
2.在节日庆典及各种重要场合,花卉盆栽都是必不可少的装点。但是花卉盆栽要摆出相应场合下需要的具体图案,往往需要大量的园艺工人现场操作,占用大量人力,增加了成本,且工人的户外工作环境恶劣,易受环境伤害。
3.申请号为cn202010332900.1的国内发明专利提出了一种花展造型摆放系统及其摆放方法,为了实现该专利,需要使用大量的“移动装置”——每盆花卉都需要对应一个可以自行移动、自动升降的“移动装置”,这使得该专利的实现成本非常高,生产和实际使用的成本远远高于目前市场中对于花卉盆栽的使用预算。实际上,市场中盆栽摆放的现实场景下,盆栽只需要摆放到较为规整的盆栽架上即可,盆栽架结构简单而规则,摆放场景很容易用数字化语言描述,这使得以较低成本自动化执行盆栽摆放工作成为可能。
技术实现要素:
4.针对目前市场中花卉盆栽的摆放需要占用大量人工,造成成本高企、人员工作环境恶劣的问题,本发明提出了一种可以以较低成本实现自动化摆放盆栽的机构及其摆放方法。
5.为实现以上目的,本发明采取了以下技术方案。
6.一方面,本发明所提出了一种花卉盆栽的摆放机构,包括盆栽储运车、盆栽格架、抓放装置和控制系统。盆栽格架水平安装于所述盆栽储运车内壁上,盆栽格架上设置有定位格槽,抓放装置包括底座、支柱、旋转环座、水平伸缩杆、气动爪、固定环座和伸缩吊索,底座安装于所述盆栽储运车的内部底面,支柱底端垂直安装于底座中心,支柱的顶端与盆栽储运车内部顶面固定连接,支柱穿过旋转环座,支柱与旋转环座内侧紧贴并活动连接,水平伸缩杆的一端与旋转环座固定连接,水平伸缩杆的另一端与气动爪固定连接,支柱穿过固定环座,支柱与固定环座内侧紧贴并固定连接,固定环座的外侧与气动爪的中间位置通过伸缩吊索连接。抓放装置与控制系统电连接。
7.抓放装置系本发明的关键执行机构,通过控制系统的控制,为实现自动摆放盆栽花卉提供可能。
8.进一步地,所述支柱外壁上竖直设置有三条镂空槽,所述旋转环座内侧水平设置有环形凹槽,所述固定环座内部设置有第一伺服电机,支柱内部竖直设置有第一滚珠丝杠和三爪环,第一滚珠丝杠包括第一滚珠丝杠螺杆和第一滚珠丝杠螺母,第一伺服电机的输出端与第一滚珠丝杠螺杆固定连接,第一滚珠丝杠螺母与三爪环固定连接,三爪环的环体与支柱内壁紧贴,三爪环的三个爪头伸出支柱外壁上的三条镂空槽嵌入旋转环座内侧的环形凹槽中。
9.三爪环的三个爪头伸出支柱的镂空槽进而卡入旋转环座内侧的环形凹槽,以三个
点确定了一个平面,保证了旋转环座在第一伺服电机的控制下做竖直运动的同时可以保持水平。
10.进一步地,所述旋转环座内部设置有第二伺服电机,所述水平伸缩杆内部设置有第二滚珠丝杠,第二滚珠丝杠包括第二滚珠丝杠螺杆和第二滚珠丝杠螺母,第二伺服电机的输出端与第二滚珠丝杠螺杆固定连接,第二滚珠丝杠螺母与水平伸缩杆远离支柱的一端固定连接。
11.通过第二伺服电机的带动,使水平伸缩杆可以在水平方向上实现伸缩运动。
12.进一步地,所述气动爪包括一对夹爪、一对滑动块、水平轨架、承力拉环和气缸,夹爪与滑动块一一对应并安装于滑动块上,水平轨架背离所述支柱的一侧上设置有滑轨,滑动块通过滑轨与水平轨架滑动连接,气缸固定于水平轨架上,气缸的动力输出端与滑动块连接,承力拉环设置于水平轨架的中间位置,承力拉环与所述伸缩吊索的一端固定连接。
13.通过气动爪抓取花卉盆栽,配合水平伸缩杆和旋转环座,可以实现自动抓取搬运花盆的技术目的。
14.进一步地,所述固定环座内设置有尺簧和电动锁栓,尺簧的活动端与所述伸缩吊索的一端固定连接,电动锁栓与所述控制系统电连接。
15.尺簧自动卷缩可以让伸缩吊索根据水平伸缩杆自由伸展回缩,保证了动作的流畅,在水平伸缩杆运动到指定长度时电动锁栓将锁住伸缩吊索,伸缩吊索可以为水平伸缩杆提供拉力,保证了整个结构的稳定性。
16.进一步地,所述控制系统包括第一伺服驱动器、第二伺服驱动器、气缸控制器、控制主板、输入装置和显示装置,第一伺服驱动器、第二伺服驱动器、气缸控制器、输入装置和显示装置均与控制主板电连接,第一伺服驱动器与所述第一伺服电机电连接,第二伺服驱动器与所述第二伺服电机电连接,气缸控制器与所述气缸电连接。
17.控制主板与各个控制器、驱动器电连接,保证了自动化控制的实现。
18.另一方面,本发明所提出了一种花卉盆栽摆放机构的摆放方法,所述方法包括以下步骤:s1:通过输入装置向控制系统输入花卉盆栽摆放地点的物理信息,包括盆栽架的位置、盆栽架不同层级的高度、盆栽架每层的宽度、盆栽架每层的长度;s2:通过输入装置向控制系统输入花卉盆栽的图案图形信息,并实时通过显示装置查看模拟效果,根据模拟效果调整花卉盆栽的图案图形信息;s3:通过显示装置向操作人员显示步骤s2的设计方案所需要的不同颜色的花卉盆栽的数量、待摆放的不同颜色的盆栽花卉所对应的盆栽格架上不同格子的编号、盆栽储运车执行摆放任务时相对盆栽架的若干工作位置;s4:按照步骤s3所显示的要求,向盆栽储运车上装载花卉盆栽;s5:将盆栽储运车移动至步骤s3所要求的第一个工作位置,通过输入装置控制整个机构开始摆放盆栽,完成第一个工作位置上的摆放任务后,通过显示装置提示操作人员将盆栽储运车移动到步骤s3所要求的下一个工作位置,继续执行摆放任务,直至遍历全部摆放位置。
19.有益效果:本发明所公开的花卉盆栽的摆放机构及摆放方法,能够节省人工,自动化实现园
艺工作中盆栽花卉的摆放任务,避免了园艺工人长期处身于户外环境中,同时,结合市场中真实而常见的场景有针对性地做出了盆栽花卉的摆放策略,有效控制了本发明的生产成本和使用成本。
附图说明
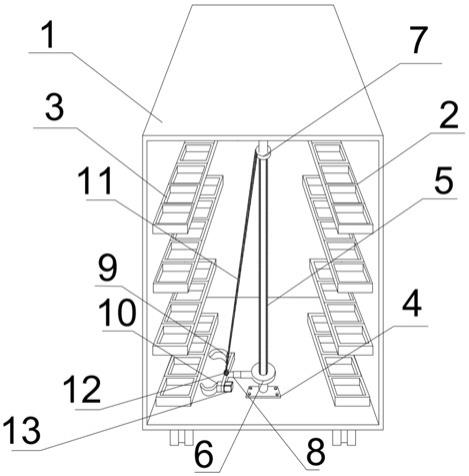
20.图1为本发明的整体结构示意图;图2为本发明的控制系统示意图;其中,1-盆栽储运车、2-盆栽格架、3-定位格槽、4-底座、5-支柱、6-旋转环座、7-固定环座、8-水平伸缩杆、9-夹爪、10-滑动块、11-伸缩吊索、12-承力拉环、13-气缸、14-输入装置、15-显示装置。
具体实施方式
21.为了使本技术领域的人员更好地理解本发明的内容,现结合附图和具体实施例对本发明做进一步说明。
22.如图1所示,一种花卉盆栽的摆放机构,包括盆栽储运车1、盆栽格架2、抓放装置和控制系统;盆栽格架2水平安装于所述盆栽储运车1内壁上,盆栽格架2上设置有定位格槽3;抓放装置包括底座4、支柱5、旋转环座6、水平伸缩杆8、气动爪、固定环座7和伸缩吊索11,所述底座4安装于所述盆栽储运车1的内部底面,支柱5底端垂直安装于底座4中心,支柱5的顶端与盆栽储运车1内部顶面固定连接,支柱5穿过旋转环座6,支柱5与旋转环座6内侧紧贴并活动连接,水平伸缩杆8的一端与旋转环座6固定连接,水平伸缩杆8的另一端与气动爪固定连接,支柱5穿过固定环座7,支柱5与固定环座7内侧紧贴并固定连接,固定环座7的外侧与气动爪的中间位置通过伸缩吊索11连接;抓放装置与所述控制系统电连接。
23.支柱5外壁上竖直设置有三条镂空槽,所述旋转环座6内侧水平设置有环形凹槽,所述固定环座7内部设置有第一伺服电机,支柱5内部竖直设置有第一滚珠丝杠和三爪环,第一滚珠丝杠包括第一滚珠丝杠螺杆和第一滚珠丝杠螺母,第一伺服电机的输出端与第一滚珠丝杠螺杆固定连接,第一滚珠丝杠螺母与三爪环固定连接,三爪环的环体与支柱5内壁紧贴,三爪环的三个爪头伸出支柱5外壁上的三条镂空槽嵌入旋转环座6内侧的环形凹槽中。旋转环座6内部设置有第二伺服电机,所述水平伸缩杆8内部设置有第二滚珠丝杠,第二滚珠丝杠包括第二滚珠丝杠螺杆和第二滚珠丝杠螺母,第二伺服电机的输出端与第二滚珠丝杠螺杆固定连接,第二滚珠丝杠螺母与水平伸缩杆8远离支柱5的一端固定连接。气动爪包括一对夹爪9、一对滑动块10、水平轨架、承力拉环12和气缸13,夹爪9与滑动块10一一对应并安装于滑动块10上,水平轨架背离所述支柱5的一侧上设置有滑轨,滑动块10通过滑轨与水平轨架滑动连接,气缸13固定于水平轨架上,气缸13的动力输出端与滑动块10连接,承力拉环12设置于水平轨架的中间位置,承力拉环12与所述伸缩吊索11的一端固定连接。固定环座7内设置有尺簧和电动锁栓,尺簧的活动端与所述伸缩吊索11的一端固定连接,电动锁栓与所述控制系统电连接。
24.如图2所示,控制系统包括第一伺服驱动器、第二伺服驱动器、气缸13控制器、电动锁栓控制器、控制主板、输入装置14和显示装置15,第一伺服驱动器、第二伺服驱动器、气缸13控制器、电动锁栓控制器、输入装置14和显示装置15均与控制主板电连接,第一伺服驱动
器与所述第一伺服电机电连接,第二伺服驱动器与所述第二伺服电机电连接,气缸13控制器与所述气缸13电连接,电动锁栓控制器与所述电动锁栓电连接。
25.本发明还提出了一种花卉盆栽摆放机构的摆放方法,所述方法包括如下步骤:s1:通过输入装置14向控制系统输入花卉盆栽摆放地点的物理信息,包括盆栽架的位置、盆栽架不同层级的高度、盆栽架每层的宽度、盆栽架每层的长度;s2:通过输入装置14向控制系统输入花卉盆栽的图案图形信息,并实时通过显示装置15查看模拟效果,根据模拟效果调整花卉盆栽的图案图形信息;s3:通过显示装置15向操作人员显示步骤s2的设计方案所需要的不同颜色的花卉盆栽的数量、待摆放的不同颜色的盆栽花卉所对应的盆栽格架2上不同格子的编号、盆栽储运车1执行摆放任务时相对盆栽架的若干工作位置;s4:按照步骤s3所显示的要求,向盆栽储运车1上装载花卉盆栽;s5:将盆栽储运车1移动至步骤s3所要求的第一个工作位置,通过输入装置14控制整个机构开始摆放盆栽,完成第一个工作位置上的摆放任务后,通过显示装置15提示操作人员将盆栽储运车1移动到步骤s3所要求的下一个工作位置,继续执行摆放任务,直至遍历全部摆放位置。
26.操作人员需要提前了解需要摆放盆栽花卉的场景,将盆栽架的尺寸规格按照要求输入控制系统,并在运输本发明前往工作地点前将所需要的一定数量的不同颜色的盆栽装载到盆栽储运车1内。
27.到达工作地点后,操作人员需要将本发明移动到指定的工作位置,如盆栽架子的最左端,气动爪在控制系统的操纵下,在盆栽格架2上特定位置上抓取特定编号的盆栽,旋转环座6带动气动爪和水平伸缩杆8转动,水平伸缩杆8向外伸展,到达设定位置后气动爪张开使盆栽放置于盆栽架子。在某些情况下,水平伸缩杆8的长度不足,需要按照显示装置15的指示,在后一个工作阶段将本发明移动到下有一个工作位置,直到完成盆栽花卉的摆放任务。
28.以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1