拆盖装置的制作方法
1.本技术涉及包装技术领域,特别是涉及一种拆盖装置。
背景技术:
2.目前在包装行业,针对各种纸箱主要是利用人工的方式进行开箱,一方面人工劳动强度大,另一方面当纸箱内的原料对人体有伤害时,人工开箱的方式会对人体的健康构成威胁。
技术实现要素:
3.本技术提供一种拆盖装置,能够自动完成纸箱的拆盖,降低人工的劳动强度。
4.本技术实施例第一方面提供一种拆盖装置,所述拆盖装置包括:工作台,用于承载纸箱;定位夹紧机构,设置在所述工作台上,用于将所述纸箱定位和夹紧在所述工作台上;割刀机构,用于割开所述纸箱的箱盖;搬运机构,用于在所述割刀机构割开所述箱盖后,将所述箱盖和所述纸箱的剩余部分从所述工作台上移走;运动机构,设置在所述工作台上且与所述割刀机构、所述搬运机构连接,用于带动所述割刀机构以及所述搬运机构运动,使得所述割刀机构在运动的过程中割开所述箱盖以及所述搬运机构在运动的过程中将所述箱盖和所述纸箱的剩余部分从所述工作台上移走;控制机构,与所述定位夹紧机构、所述割刀机构、所述搬运机构以及所述运动机构连接,用于控制所述定位夹紧机构、所述割刀机构、所述搬运机构以及所述运动机构的运行。
5.有益效果是:本技术的拆盖装置在定位夹紧机构将纸箱定位夹紧在工作台上后,利用割刀机构割开纸箱的箱盖,实现纸箱的自动开箱,无需人工参与,且在开箱后,待取料设备将原料从纸箱的内部取走后,利用搬运机构将箱盖和纸箱的剩余部分从工作台上移走,也无需人工参与,整个过程既能降低人工的劳动强度,也能避免操作人员与纸箱接触,不管纸箱内部的原料是否对人体有伤害,都能保证作业人员的健康安全。
附图说明
6.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。其中:
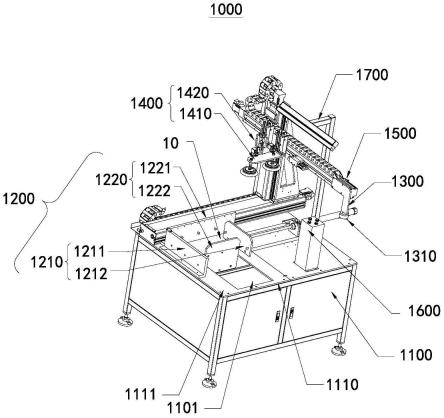
7.图1是本技术拆盖装置一实施方式的结构示意图;
8.图2是图1中搬运机构以及运动机构的结构示意图;
9.图3是图1拆盖装置的部分结构示意图;
10.图4是图1中第一定位夹紧组件/第二定位夹紧组件中第一定位板的结构示意图;
11.图5是图1中第一定位夹紧组件/第二定位夹紧组件的部分结构示意图;
12.图6是图1中割刀机构的结构示意图;
13.图7是图1中搬运机构的结构示意图。
具体实施方式
14.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性的劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
15.参阅图1,在本技术一实施方式中,拆盖装置1000包括工作台1100、定位夹紧机构1200、割刀机构1300、搬运机构1400、运动机构1500以及控制机构(图未示)。
16.工作台1100用于承载纸箱,其中预先将纸箱搬运到工作台1100上。
17.定位夹紧机构1200设置在工作台1100上,用于将纸箱定位和夹紧在工作台1100上。具体地,在将纸箱搬运到工作台1100上后,定位夹紧机构1200将纸箱定位夹紧在工作台1100的指定位置上。
18.割刀机构1300用于割开纸箱的箱盖;搬运机构1400用于在割刀机构1300割开箱盖后,将箱盖和纸箱的剩余部分(即纸箱除去箱盖的剩余部分)从工作台1100上移走。
19.运动机构1500设置在工作台1100上且与割刀机构1300、搬运机构1400连接,用于带动割刀机构1300以及搬运机构1400运动,使得割刀机构1300在运动的过程中割开箱盖以及搬运机构1400在运动的过程中将箱盖和纸箱的剩余部分从工作台1100上移走。
20.控制机构与定位夹紧机构1200、割刀机构1300、搬运机构1400以及运动机构1500连接,用于控制定位夹紧机构1200、割刀机构1300、搬运机构1400以及运动机构1500的运行。
21.具体地,在控制机构控制定位夹紧机构1200将纸箱定位夹紧在工作台1100上的指定位置后,控制机构控制运动机构1500带动割刀机构1300围绕纸箱运动,在围绕纸箱运动的过程中,割刀机构1300中的割刀1310插入纸箱并割开纸箱的箱盖,接着控制机构控制运动机构1500带动搬运机构1400运动,以将割开的箱盖从工作台1100上移动,最后待取料设备将纸箱内部的原料搬走后,控制机构控制运动机构1500继续带动搬运机构1400运动,以将纸箱的剩余部分从工作台1100上移走。
22.在上述整个过程中,一方面无需人工参与就能实现纸箱的开箱,另一方面在开箱后,待取料设备将原料从纸箱的内部取走后,拆盖装置1000还能将箱盖和纸箱的剩余部分从工作台1100上移走,既能降低人工的劳动强度,也能避免操作人员与纸箱接触,不管纸箱内部的原料是否对人体有伤害,都能保证作业人员的健康安全。
23.参阅图2,在本实施方式中,运动机构1500包括安装在工作台1100上的第一运动轴1510、与第一运动轴1510滑动连接且延伸方向与工作台1100承载面1111垂直的第二运动轴1520以及与第二运动轴1520滑动连接且延伸方向与第一运动轴1510、第二运动轴1520延伸方向均垂直的第三运动轴1530。具体地,第二运动轴1520能够在第一运动轴1510的延伸方向上相对第一运动轴1510运动,第三运动轴1530能够在第二运动轴1520和第三运动轴1530的延伸方向上相对第二运动轴1520运动,从而运动机构1500能够带动割刀机构1300以及搬运机构1400在x、y以及z三个方向上运动。
24.其中作业人员在作业之前,可以输入纸箱的规格(例如纸箱的长、宽以及高),然后
在作业过程中,控制机构根据纸箱的规格,控制运动机构1500带动割刀机构1300以及搬运机构1400沿着对应的路径运动。
25.结合图1和图3,定位夹紧机构1200包括第一定位夹紧组件1210以及第二定位夹紧组件1220。
26.第一定位夹紧组件1210、第二定位夹紧组件1220均设置在工作台1100上,其中,第一定位夹紧组件1210用于在第一方向上将纸箱定位夹紧在工作台1100上,第二定位夹紧组件1220用于在第二方向上将纸箱定位夹紧在工作台1100上,同时第一方向与第二方向垂直,且第一方向、第二方向均与工作台1100的承载面1111平行。
27.具体地,定位夹紧机构1200通过第一定位夹紧组件1210以及第二定位夹紧组件1220将纸箱在两个垂直的方向上定位夹紧在工作台1100上,可以保证纸箱完全锁紧在工作台1100上。
28.需要说明的是,在其他实施方式中,也可以仅从一个方向上将纸箱定位夹紧在工作台1100上,例如,定位夹紧机构1200在与工作台1100的承载面1111垂直的方向上将纸箱定位夹紧在工作台1100上。
29.结合图4和图5,在本实施方式中,第一定位夹紧组件1210包括第一定位板1211、第二定位板1212以及驱动件1213。
30.第一定位板1211和第二定位板1212沿着第一方向相对竖立在工作台1100上,其中第一驱动件1213与控制机构电连接且输出轴与第一定位板1211、第二定位板1212中的至少一个连接,以在控制机构的控制下驱动第二定位板1212相对第一定位板1211运动。
31.其中,第一定位板1211和第二定位板1212中可以有一个固定在工作台1100上,另一个可滑动的设置在工作台1100上,此时第一驱动件1213的输出轴与滑动设置在工作台1100上的第一定位板1211或者第二定位板1212连接,也可以是,第一定位板1211和第二定位板1212均滑动设置在工作台1100上,第一驱动件1213两个输出轴中的一个与第一定位板1211连接,另一个与第二定位板1212连接,或者,第一定位板1211和第二定位板1212均滑动设置在工作台1100上,第一驱动件1213的数量为两个,其中一个第一驱动件1213驱动第一定位板1211运动,另一个第一驱动件1213驱动第二定位板1212运动。
32.其中为了方便说明,下面以第一定位板1211固定在工作台1100上,第二定位板1212滑动设置在工作台1100上进行说明。
33.其中,第二定位夹紧组件1220的结构与第一定位夹紧组件1210的结构可以相同,也可以不同,在本实施方式中,第二定位夹紧组件1220的结构与第一定位夹紧组件1210的结构相同,包括第三定位板1221、第四定位板1222以及第二驱动件1223,第三定位板1221和第四定位板1222沿着第二方向相对竖立在工作台1100上,其中第二驱动件1223与控制机构电连接且输出轴与第三定位板1221、第四定位板1222中的至少一个连接,以在控制机构的控制下驱动第四定位板1222相对第三定位板1221运动。其中,第三定位板1221相当于第一定位板1211,第四定位板1222相当于第二定位板1212,第二驱动件1223相当于第一驱动件1213,关于第二定位夹紧组件1220的具体结构可参见第一定位夹紧组件1210,在此不做具体说明。
34.具体地,当需要将纸箱定位夹紧在工作台1100上时,第一驱动件1213在控制机构的控制下驱动第二定位板1212朝向第一定位板1211运动,直至纸箱与第一定位板1211、第
二定位板1212贴合;当搬运机构1400需要将纸箱的剩余部分从工作台1100上移走时,第一驱动件1213在控制机构的控制下驱动第二定位板1212背离第一定位板1211运动,以松开纸箱。
35.在本实施方式中,考虑到纸箱通常为长方体或者正方体结构,因此为了保证纸箱在工作台1100上的平稳运行以及用最小的外力推动纸箱在工作台1100上滑动,第一定位板1211、第二定位板1212、工作台1100的承载面1111可以两两垂直设置。
36.可以理解的是,由于第一定位夹紧组件1210是在第一方向上将纸箱定位夹紧在工作台1100上,第二定位夹紧组件1220是在第二方向上将纸箱定位夹紧在工作台1100上,因此第一定位夹紧组件1210中的第一定位板1211和第二定位夹紧组件1220中的第三定位板1221垂直设置。
37.也就是说,在本实施方式中,第一定位夹紧组件1210、第二定位夹紧组件1220中的四个定位板限定一大小可调的矩形区域,为了便于说明,下文将该大小可调的矩形区域定义为第一矩形区域10。
38.其中在对纸箱进行开箱之前,第一定位夹紧组件1210中的第一驱动件1213可以驱动第二定位板1212运动到初始位置,第二定位夹紧组件1220中的第二驱动件1223可以驱动第四定位板1222运动到初始位置,使得第一矩形区域10最大。
39.在开箱过程中,待纸箱进入第一矩形区域10后,控制机构控制第一定位夹紧组件1210中的第一驱动件1213驱动与之连接的第二定位板1212朝向第一定位板1211运动,直至纸箱与第一定位夹紧组件1210中的第一定位板1211、第二定位板1212贴合,以及控制机构控制第二定位夹紧组件1220中的第二驱动件1223驱动与之连接的第四定位板1222朝向第三定位板1221运动,直至纸箱与第二定位夹紧组件1220中的第三定位板1221、第四定位板1222贴合。
[0040][0041]
在本实施方式中,工作台1100包括承载板1110,承载板1110设有承载面1111。在一应用场景中,第一定位夹紧组件1210、第二定位夹紧组件1220各自中的定位板以及驱动件都安装在承载板1110的承载面1111上。在另一应用场景中,如图3所示,为了腾出空间在承载板1110的承载面1111上安装其他部件,将第一定位夹紧组件1210中的第一定位板1211、第二定位板1212以及第一驱动件1213安装在承载板1110的承载面1111上,将第二定位夹紧组件1220中的第三定位板1221安装在承载板1110的承载面1111上,将第二定位夹紧组件1220中的第二驱动件1223安装在承载板1110与承载面1111相背的表面上,同时承载板1110设有通孔1101,第二定位夹紧组件1220中的第四定位板1222通过通孔1101,一端与第二定位夹紧组件1220中的第二驱动件1213连接,一端凸出承载板1110的承载面1111。
[0042]
继续参阅图4和图5,第一定位板1211朝向第二定位板1212的表面、第二定位板1212朝向第一定位板1211的表面均凸设有若干定位针1214。
[0043]
其中,定位针1214起到定位纸箱内部泡沫板的作用,避免取料机构在取原料时将泡沫板一道取出。也就是说,在定位夹紧机构1200将纸箱定位夹紧后,定位针1214将泡沫板、纸箱定位在一起。
[0044]
当然在其他实施方式中,第一定位板1211、第二定位板1212的表面也可以不设置定位针1214。
[0045]
在本实施方式中,第一驱动件1213为气缸,同时为了保证第二定位板1212能够平稳地朝向第一定位板1211运行,参阅图5,第一定位夹紧组件1210进一步包括轴承1215以及导正轴1216。
[0046]
轴承1215与第一驱动件1213设置在第二定位板1212的同一侧且座体固定在工作台1100上;导正轴1216与第一驱动件1213设置在第二定位板1212的同一侧且输出轴的延伸方向与第一驱动件1213输出轴的延伸方向平行,其中,导正轴1216滑动性贯穿轴承1215的轴承体而与第二定位板1212连接,同时,导正轴1216上不与第二定位板1212连接一端的外围与定位环1217连接,以使导正轴1216上不与第二定位板1212连接的一端无法通过轴承1215的轴承体,其中定位环1217与导正轴1216的连接位置可调。
[0047]
具体地,在第一驱动件1213驱动第二定位板1212朝向第一定位板1211运动的过程中,与第二定位板1212连接的导正轴1216相对轴承1215滑动,从而导正轴1216起到导向作用,避免第二定位板1212在运动过程中发生转动现象,保证第二定位板1212相对第一定位板1211平稳运行。
[0048]
在本实施方式中,如图5所示,第一驱动件1213相背的两侧均设有轴承1215以及与轴承1215对应的导正轴1216。当然在其他实施方式中,也可以只在第一驱动件1213的一侧设置轴承1215以及对应的导正轴1216。
[0049]
其中,定位环1217与导正轴1216的连接位置可调,例如定位环1217与导正轴1216通过螺纹连接。
[0050]
具体地,定位环1217的作用是限制对应的第一驱动件1213输出轴的伸长量:作业人员在作业之前,根据纸箱的规格调节定位环1217在导正轴1216上的位置,使得第一驱动件1213在驱动第二定位板1212运动的过程中,当纸箱同时与第一定位板1211、第二定位板1212贴合时,定位环1217正好与轴承1215抵接,此时第一驱动件1213依然对第二定位板1212继续施加驱动力,但是因为定位环1217的限制作用,第二定位板1212无法再朝向第一定位板1211运动,从而第一定位夹紧组件1210以及第二定位夹紧组件1220实现定位夹紧功能。
[0051]
需要说明的是,在其他实施方式中,导正轴1216不与第二定位板1212连接的一端外围也可以不与定位环1217连接,此时作业人员在作业之前,输入纸箱的规格,具体输入纸箱的长、宽以及高等,然后控制机构在接收到纸箱的规格后,根据纸箱的规格,确定第一定位夹紧组件1210、第二定位夹紧组件1220中第一驱动件1213输出轴的伸长量分别为第一伸长量以及第二伸长量。
[0052]
与第一定位夹紧组件1210类似,第二定位夹紧组件1220也进一步包括轴承1215、导正轴1216以及定位环1217等结构,第二定位夹紧组件1220中轴承1215、导正轴1216以及定位环1217与第一定位夹紧组件1210中轴承1215、导正轴1216以及定位环1217的结构对应相同,在此不再赘述。
[0053]
在开箱过程中,待纸箱进入第一矩形区域10后,控制机构控制第一定位夹紧组件1210中的第一驱动件1213驱动与之连接的第二定位板1212朝向对应的第一定位板1211运动,此时待第一定位夹紧组件1210中第一驱动件1213输出轴的伸长量达到第一伸长量后,纸箱与第一定位夹紧组件1210中的第一定位板1211、第二定位板1212贴合;以及控制机构控制第二定位夹紧组件1220中的第二驱动件1223驱动与之连接的第四定位板1222朝向对
应的第三定位板1221运动,此时待第二定位夹紧组件1220中第二驱动件1223输出轴的伸长量达到第二伸长量后,纸箱与第二定位夹紧组件1220中的第三定位板1221、第四定位板1222贴合,定位夹紧机构1200完成了对纸箱的定位夹紧。
[0054]
继续参阅图4,第一定位夹紧组件1210、第二定位夹紧组件1220中至少一个所包括的第一定位板1211上安装有第二光电传感器1218,该第二光电传感器1218与控制机构连接,具体地,当第二光电传感器1218监测到第一矩形区域10内存在纸箱时,控制机构控制第一定位夹紧组件1210以及第二定位夹紧组件1220运行。
[0055]
当然在其他实施方式中,也可以不设置第二光电传感器1218,由操作人员手动操作第一定位夹紧组件1210以及第二定位夹紧组件1220运行。
[0056]
在本实施方式中,割刀机构1300除了包括割刀1310外,还包括扭矩传感器(图未示)。
[0057]
割刀1310用于割开箱盖;扭矩传感器与控制机构以及割刀1310连接,用于采集割刀1310上的扭矩,并发送给控制机构,以使控制机构根据扭矩而确定割刀1310的移动路径。
[0058]
参阅图6,割刀1310的数量可以为4个,4个割刀1310分别对纸箱的四个表面进行切割。在其他实施方式中,割刀1310的数量也可以是一个,在切割过程中,割刀1310发生旋转,从而对纸箱的四个表面进行切割。
[0059]
考虑到一般纸箱的切割路径都是固定的,且在这些切割路径上,不会存在例如铆钉等障碍物,但是在某些特殊场景下,例如前面工序的失误等,使得纸箱的切割路径存在障碍物,而如果切割的过程中割刀1310不避开障碍物,可能会导致割刀1310损坏,或者如果切割的过程中,割刀1310的切割深度过大,可能会导致割刀1310划伤纸箱内部的原料,因此在割刀1310切割纸箱的过程中,扭矩传感器采集割刀1310上的扭矩,控制机构根据扭矩信号判断割刀1310在切割过程中是否遇到障碍物或者是否切割深度过深而划伤纸箱内部的原料。
[0060]
例如,如果在切割过程中,割刀1310上的扭矩在短时间内急剧上升,则确定割刀1310在切割过程中切割到障碍物或者割到纸箱内部的原料,进而控制机构控制报警机构进行报警提示。
[0061]
其中还可以对割刀1310是切割到障碍物还是割到纸箱内部的原料做进一步区分:相比割到纸箱内部的原料,割刀1310割到障碍物时扭矩在短时间内上升的幅度更大。
[0062]
另外如果在割刀1310切割的过程中,割刀1310上的扭矩缓慢的变大,则确定割刀1310锋利度不够,割刀1310变钝,进而提示需要更换割刀1310。
[0063]
继续参阅图6,在本实施方式中,割刀机构1300进一步包括第一安装板1320以及固定板1330。
[0064]
其中,第一安装板1320的一端与第二运动轴1520的一端固定连接,第一安装板1320的另一端与固定板1330固定连接,割刀1310固定在固定板1330上,同时扭矩传感器也可以固定在固定板1330上而采集割刀1310上的扭矩。
[0065]
继续参阅图1,拆盖装置1000进一步还包括第一光电传感器1600。其中第一光电传感器1600设置在工作台1100上且与控制机构连接,用于采集未被割刀1310遮挡的激光发射器(图未示,该激光发射器与第一光电传感器1600相对设置,能够接收激光发射器发出的激光)发射的光信号,并发送给控制机构,以使控制机构根据光信号而确定割刀是否完整。
[0066]
其中,激光发射器向第一光电传感器1600发送光信号,第一光电传感器1600接收激光发射器发送的光信号,当需要判断割刀1310是否完整时,控制机构控制运动机构1500带动割刀1310进入激光发射器和第一光电传感器1600之间,此时激光发射器发出的光信号会被割刀1310遮挡,根据第一光电传感器1600接收到的光信号可以确定割刀1310的形状和工作状态,从而判断割刀1310是否发生断刀现象以及工作是否正常。
[0067]
结合图1和图7,搬运机构1400包括第一搬运组件1410以及第二搬运组件1420。
[0068]
第一搬运组件1410设置在第三运动轴1530上,用于在割刀机构1300割开箱盖后,将箱盖从工作台1100上移走;第二搬运组件1420设置在第三运动轴1530上,用于在第一搬运组件1410将箱盖从工作台1100上移走后,将纸箱的剩余部分从工作台1100上移走后。
[0069]
具体地,在割刀机构1300割开箱盖后,运动机构1500带动第一搬运组件1410运动,并使得第一搬运组件1410在运动的过程中将箱盖从工作台1100上移走。
[0070]
待取料设备将纸箱内部的原料搬走后,定位夹紧机构1200松开纸箱的剩余部分,然后运动机构1500带动第二搬运组件1420运动,并使得第二搬运组件1420在运动的过程中将纸箱的剩余部分从工作台1100上移走。
[0071]
在本实施方式中,第一搬运组件1410以及第二搬运组件1420通过固定在第三运动轴1530上的第二安装板1430与第三运动轴1530连接。
[0072]
继续参阅图7,第一搬运组件1410包括第一气缸1411以及真空吸盘1412。
[0073]
第一气缸1411设置在第三运动轴1530上且与控制机构电连接,第一气缸1411输出轴的延伸方向与工作台1100的承载面1111垂直;真空吸盘1412与第一气缸1411的输出轴连接,用于吸取箱盖。其中,第一气缸1411具体安装在第二安装板1430上。
[0074]
具体地,真空吸盘1412与真空系统连接,当需要吸取箱盖时,控制机构开启真空系统,真空吸盘1412吸取箱盖。其中为了保证真空系统的安全性能,真空吸盘1412还与真空负压开关1413连接。
[0075]
其中,第一气缸1411驱动真空吸盘1412在与第二运动轴1520平行的方向上运动。同时第一气缸1411的作用是避免真空吸盘1412在第二搬运组件1420抓取纸箱剩余部分时与纸箱发生干涉,具体地,在第二搬运组件1420抓取纸箱剩余部分之前,第一气缸1411驱动真空吸盘1412远离工作台1100。
[0076]
同时第二搬运组件1420包括第二气缸1421、第三气缸1422以及纸箱夹具1423。
[0077]
第二气缸1421设置在第三运动轴1530上且与控制机构电连接,第二气缸1421输出轴的延伸方向与工作台1100的承载面1111垂直,其中,第二气缸1421具体通过第二安装板1430与第三运动轴1530连接;第三气缸1422与第二气缸1421的输出轴连接且与控制机构电连接,第三气缸1422输出轴的延伸方向与工作台1100的承载面1111平行;纸箱夹具1423与第三气缸1422连接,用于在第三气缸1422的驱动下抓取纸箱的剩余部分。
[0078]
其中,与第一气缸1411的作用类似,第二气缸1421驱动纸箱夹具1423在与第二运动轴1520平行的方向上运动。同时第二气缸1421的作用是避免纸箱夹具1423在第一搬运组件1410抓取箱盖时与纸箱发生干涉,具体地,在第一搬运组件1410抓取箱盖之前,第二气缸1421驱动纸箱夹具1423远离工作台1100。
[0079]
其中,第三气缸1422驱动纸箱夹具1423的张开与闭合,以使纸箱夹具1423夹取纸箱的剩余部分。
[0080]
其中,纸箱夹具1423包括第一夹板14231以及第二夹板14232,均与第三气缸1422连接,以在第三气缸1422的驱动下相向运动而抓取纸箱的剩余部分,或者相背运动而放开抓取的纸箱的剩余部分。
[0081]
具体地,在割刀机构1300割开纸箱的箱盖后,运动机构1500带动搬运机构1400运动至纸箱的上方,接着在控制机构的控制下,第二气缸1421控制纸箱夹具1423远离工作台1100,第一气缸1411驱动真空吸盘1412靠近工作台1100上的纸箱,然后控制机构控制与真空吸盘1412连接的真空系统打开,真空吸盘1412将箱盖吸取,接着运动机构1500带动搬运机构1400运动,以将箱盖从工作台1100上移走,并将箱盖送入回收输送线。
[0082]
在取料设备将纸箱内部的原料取走后,运动机构1500带动搬运机构1400运动至纸箱的上方,接着在控制机构的控制下,第一气缸1411驱动真空吸盘1412远离工作台1100,第二气缸1421控制纸箱夹具1423靠近工作台1100上的指向,同时在控制机构的控制下,第三气缸1422驱动纸箱夹具1423夹起纸箱的剩余部分,接着运动机构1500带动搬运机构1400运动,以将纸箱的剩余部分从工作台1100上移走,并将箱盖送入回收输送线。
[0083]
需要说明的是,在不考虑干涉的前提下,也可以不设置第一气缸1411以及第二气缸1421。
[0084]
继续参阅图1,工作台1100上还安装有照明机构1700。照明机构1700用于提供照明,从而图像采集传感器可以对纸箱进行拍照,以便处理器通过图像对纸箱的位置或者外部结构,例如纸箱的外围是否有打包带等进行分析。
[0085]
以上所述仅为本技术的实施方式,并非因此限制本技术的专利范围,凡是利用本技术说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本技术的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1