拆垛剪打包带机构以及取料装置的制作方法
1.本技术涉及包装技术领域,特别是涉及一种拆垛剪打包带机构以及取料装置。
背景技术:
2.目前纸箱拆垛、从纸箱中取料主要还是采用人工的方式,劳动强度大,效率低下,因此急需改变此种现状。
技术实现要素:
3.本技术提供一种拆垛剪打包带机构以及取料装置,能够实现拆垛、剪打包的自动化,无需人工参与,能够降低劳动强度,提高生产效率。
4.本技术实施例第一方面提供一种拆垛剪打包带机构,包括:第一安装板,包括相背设置的第一表面以及第二表面;第一工具侧快换连接盘,安装在所述第一表面上,用于将所述拆垛剪打包带机构与机械臂的末端连接;第一抓取件,安装在所述第二表面上,用于将纸箱从纸箱垛型中抓取到工作台上;气动剪刀,与所述第一安装板连接,用于剪断所述工作台上的所述纸箱外围的打包带。
5.本技术实施例第二方面提供一种取料装置,所述取料装置包括机械臂、第一控制机构以及安装在所述机械臂末端的上述任一项所述的拆垛剪打包带机构,所述第一控制机构与所述拆垛剪打包带机构连接,用于控制所述拆垛剪打包带机构的运行;同时,所述机械臂的末端安装有机器侧快换连接盘,所述机器侧快换连接盘用于连接所述第一工具侧快换连接盘,以实现在所述机械臂的末端安装所述拆垛剪打包带机构。
6.本技术的有益效果是:本技术利用拆垛剪打包带机构将纸箱从纸箱垛型中抓取到工作台上,并将工作台上的纸箱外围的打包带剪断,从而方便后续利用抓取桶料机构将纸箱内部的桶料取出,或者利用抓取袋料机构将纸箱内部的袋料取出,实现拆垛、剪打包带的自动化,无需人工参与,能够降低劳动强度,提高生产效率。
附图说明
7.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图,其中:
8.图1是本技术取料装置在工作时的结构示意图;
9.图2是图1中取料装置的结构示意图;
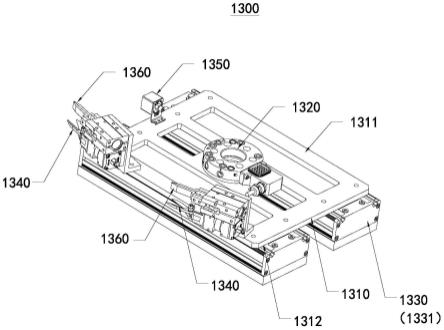
10.图3是图2中拆垛剪打包带机构的结构示意图;
11.图4是图3中气动剪刀和第一气动夹具的结构示意图;
12.图5是图1中抓取桶料机构的结构示意图;
13.图6是图1中抓取袋料机构的结构示意图;
14.图7是图1中拆垛剪打包带机构、抓取桶料机构以及抓取袋料机构放置在工具台上的示意图。
具体实施方式
15.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术的一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本技术保护的范围。
16.参阅图1至图3,在一实施方式中,取料装置1000包括机械臂1100、第一控制机构1200以及拆垛剪打包带机构1300,第一控制机构1200与拆垛剪打包带机构1300连接,用于控制拆垛剪打包带机构1300的运行。
17.其中,机械臂1100的运行由第二控制机构2100控制,机械臂1100 具体可以是机器人的机械臂,当机械臂1100为机器人的机械臂时,第二控制机构2100为机器人控制柜。其中为了便于说明,以下均以机械臂1100为机器人的机械臂进行说明。
18.其中,拆垛剪打包带机构1300用于将纸箱(1)从纸箱垛型(10) 中抓取到工作台上,并将工作台上的纸箱(1)外围的打包带剪断。
19.其中在开箱之前,agv小车将承载有多个纸箱1的托盘输送到两个栈板放置区a中,然后机械臂1100带动末端连接的拆垛剪打包带机构 1300运动,同时在拆垛剪打包带机构1300运动的过程中,第一控制机构1200控制第一抓取件1330将纸箱1从纸箱垛型10中抓取到工作台上,然后机械臂1100带动拆垛剪打包带机构1300继续运动,在运动的过程中,第一控制机构1200控制气动剪刀1340将纸箱1外围的打包带剪断。
20.其中,拆垛剪打包带机构1300具体包括第一安装板1310、第一工具侧快换连接盘1320、第一抓取件1330以及气动剪刀1340。
21.第一安装板1310包括相背设置的第一表面1311以及第二表面1312;第一工具侧快换连接盘1320安装在第一表面1311上,用于将拆垛剪打包带机构1300与机械臂1100的末端连接。其中,机械臂1100的末端安装有机器侧快换连接盘(由于角度问题,图未示),机器侧快换连接盘用于连接第一工具侧快换连接盘1320,以实现在机械臂1100的末端安装拆垛剪打包带机构1300。具体地,通过机器侧快换连接盘与第一工具侧快换连接盘1320的相互配合,可以将拆垛剪打包带机构1300快速地安装在机械臂1100的末端,且整个过程中可以无需人工参与。
22.第一抓取件1330安装在第二表面2312上,用于将纸箱1从纸箱垛型10中抓取到工作台上。在本实施方式中,第一抓取件1330包括第一真空吸盘1331,在一应用场景中,为了保证第一抓取件1330能够稳定且牢固第抓取纸箱1,第一真空吸盘1331具体可以是海绵吸盘。
23.在本实施方式中,为了监测第一抓取件1330在吸取纸箱1时的真空度,第一抓取件1330还连接有第一负压开关1350。在第一抓取件1330 吸取纸箱1的过程中,第一负压开关1350实时检测第一抓取件1330中的真空度,如果第一负压开关1350监测到第一抓取件1330中的真空度达不到标准,则取料装置1000进行报警提示。
24.气动剪刀1340与第一安装板1310连接,用于剪断工作台上的纸箱 1外围的打包
带。具体地,在需要剪断打包带时,机械臂1100带动末端连接的拆垛剪打包带机构1300运动至合适的位置处,以使得打包带进入气动剪刀1340的两个刀刃之间,然后气动剪刀1340在第一控制机构 1200的控制下剪断打包带。
25.其中,考虑到纸箱1的外围一般有两条打包带,因此如图3所示,在第一安装板1310第一表面1311的一侧边缘同时安装两个气动剪刀 1340,两个气动剪刀1340的剪刀本体均凸出第一安装板1310。具体地,两个气动剪刀1340对应不同的打包带设置,且两个气动剪刀1340的指向不同。
26.其中,为了将剪断的打包带及时清理干净,避免剪断的打包带堆积在工作台上,结合图3和图4,拆垛剪打包带机构1300进一步还包括第一气动夹具1360,第一气动夹具1360气动剪刀1340以及纸箱1外围的打包带一一对应设置,也就是说,纸箱1的外围打包带的数量、气动剪刀1340的数量以及第一气动夹具1360的数量相等,其中第一气动夹具 1360均与第一控制机构1200连接,用于在第一控制机构1200的控制下,在对应的气动剪刀1340剪断对应的打包带之前,夹住对应的打包带。
27.具体地,在气动剪刀1340剪断打包带之前,对应的第一气动夹具 1360在第一控制机构1200的控制下夹住该打包带,然后待气动剪刀 1340剪断打包带之后,第一气动夹具1360依然夹住打包带,最后随着机械臂1100的运动,打包带与纸箱1分离,可以被输送到回收箱上。
28.下面对拆垛剪打包带机构1300的运行过程进行介绍,其中以打包带的数量为两条进行说明:
29.首先机械臂1100带动拆垛剪打包带机构1300运动到栈板放置区a,然后第一抓取件1330在第一控制机构1200的控制下吸取纸箱1,接着机械臂1100继续运动以使纸箱1被放置在工作台上,在该过程中,第一负压开关1350实时检测第一抓取件1330中的真空度。
30.接着机械臂1100带动拆垛剪打包带机构1300运动至第一条打包带处,然后第一控制机构1200控制对应的第一气动夹具1360夹住第一条打包带,接着第一控制机构1200控制对应的气动剪刀1340剪断第一条打包带。
31.然后避免被夹住的第一条打包带限制拆垛剪打包带机构1300的运动,机械臂1100先带动拆垛剪打包带机构1300将第一条打包带抬起一定高度,例如300mm,然后机械臂1100带动拆垛剪打包带机构1300运动至第二条打包带处,并第一控制机构1200控制对应的第一气动夹具 1360夹住第二条打包带,接着第一控制机构1200控制对应的气动剪刀 1340剪断第二条打包带。
32.此时两条打包带均被第一气动夹具1360夹住,然后机械臂1100带动拆垛剪打包带机构1300带动,使得两条打包带均与纸箱1分离,最后待运动至回收箱处,第一气动夹具1360松开打包带,两条打包带均被扔到回收箱中。
33.需要说明的是,当不考虑清理剪断的打包带的前提下,拆垛剪打包带机构1300也可以不包括第一气动夹具1360。
34.结合图1、图2和图5,取料装置1000还包括抓取桶料机构1400。
35.桶料机构1400与第一控制机构1200连接,用于在第一控制机构 1200的控制下,抓取纸箱1内部的桶料,抓取桶料机构1400包括第二工具侧快换连接盘1410;其中,控制机械臂1100的第二控制机构2100 根据接收到的触发指令,将机械臂1100上的机器侧快换连接
盘切换为与第二工具侧快换连接盘1410连接。
36.在拆垛剪打包带机构1300将纸箱1外围的打包带剪断后,由拆盖装置割开纸箱1的箱盖,并将箱盖从工作台上移走,此时如果纸箱1内部的原料为桶料,则第二控制机构2100控制机械臂1100上的机器侧快换连接盘不再与第一工具侧快换连接盘1320连接,而是与第二工具侧快换连接盘1410连接,实现将抓取桶料机构1400安装在机械臂1100 的末端,从而实现切换机械臂1100末端所连接的末端执行器。需要说明的是,在切换机械臂1100末端所连接的末端执行器的过程中,无需人工参与,可以提高效率。
37.在抓取桶料机构1400安装在机械臂1100的末端后,随着机械臂 1100的运动,抓取桶料机构1400将桶料从纸箱1内部提出,并将桶料放入输送线上。
38.其中,抓取桶料机构1400进一步包括第二安装板1420以及第二气动夹具1430。
39.第二安装板1420包括相背设置的第一表面1421以及第二表面1422,第二工具侧快换连接盘1410安装在第一表面1421上;第二气动夹具 1430安装在第二表面1422上且与第一控制机构1200连接,用于在第一控制机构1200的控制下,夹取纸箱1内部的桶料。
40.具体地,在抓取桶料的过程中,机械臂1100带动抓取桶料机构1400 运动至纸箱1的内部,然后第二气动夹具1430在第一控制机构1200的控制下夹取桶料,最终机械臂1100带动抓取桶料机构1400运动,以将桶料从纸箱1内部提出,并将桶料放入输送线上。
41.继续参阅图5,第二气动夹具1430包括气缸1431、第一子夹板1432 以及第二子夹板1433。
42.气缸1431与第一控制机构1200连接;第一子夹板1432、第二子夹板1433与气缸1431连接,以在气缸1431的驱动下相向或者相背运动。
43.具体地,当需要夹取桶料时,气缸1431在第一控制机构1200的控制下驱动第一子夹板1432、第二子夹板1433相背运动,使得桶料位于第一子夹板1432以及第二子夹板1433之间,然后气缸1431再驱动第一子夹板1432、第二子夹板1433相向运动,使得第一子夹板1432以及第二子夹板1433配合夹紧桶料。
44.其中为了保证夹紧桶料,第一子夹板1432以及第二子夹板1433均为l型板,且第一子夹板1432以及第二子夹板1433不与气缸1431连接的一端设有与桶料匹配的弧形缺口14321。
45.在本实施方式中,考虑到纸箱1内部的原料还有可能是袋料,因此结合图1、图2和图6,取料装置1000还包括抓取袋料机构1500。
46.抓取袋料机构1500与第一控制机构1200连接,用于在第一控制机构1200的控制下,抓取纸箱内部的袋料,抓取袋料机构1500包括第三工具侧快换连接盘1510;其中,控制机械臂1100的第二控制机构2100 根据接收到的触发指令,将机械臂1100上的机器侧快换连接盘切换为与第三工具侧快换连接盘1510连接。
47.具体地,当需要抓取纸箱1内部的袋料时,第一控制机构1200切换机械臂1100末端所安装的末端执行器,将机械臂1100末端的机器侧快换连接盘与第三工具侧快换连接盘1510连接,实现将抓取袋料机构 1500安装在机械臂1100的末端。
48.继续参阅图6,抓取袋料机构1500包括第三安装板1520以及第二真空吸盘1530。
49.第三安装板1520包括相背设置的第一表面1521以及第二表面1522,第三工具侧快换连接盘1510安装在第一表面1521上;第二真空吸盘 1530安装在第二表面1522上且与第
一控制机构1200连接,用于在第一控制机构1200的控制下,吸取纸箱1内部的袋料。
50.具体地,在抓取桶料的过程中,机械臂1100带动抓取袋料机构1500 运动至纸箱1的内部,然后第二真空吸盘1530在第一控制机构1200的控制下吸取桶料,最终机械臂1100带动抓取袋料机构1500运动,以将袋料从纸箱1内部提出,并将袋料放入输送线上。
51.其中,为了监测第二真空吸盘1530在吸取袋料时的真空度,第二真空吸盘1530还连接有第二负压开关1540。在第二真空吸盘1530吸取袋料的过程中,第二负压开关1540实时检测第二真空吸盘1530中的真空度,如果第二负压开关1540监测到第二真空吸盘1530中的真空度达不到标准,则取料装置1000可以进行报警。
52.继续参阅图2,取料装置1000进一步包括视觉机构1600。
53.视觉机构1600安装在机械臂1100上,用于对纸箱垛型10进行拍照,以确定纸箱1在纸箱垛型10中的位置,以及对放置在工作台上的纸箱1进行拍照,以确定纸箱1外围的打包带的位置。
54.具体地,在拆垛剪打包带机构1300去纸箱垛型10中抓取纸箱1之前,视觉机构1600对纸箱垛型10进行拍照,然后第二控制机构2100 对得到的第一图像进行分析,得到纸箱垛型10中纸箱1的位置,然后机械臂1100在第二控制机构2100的控制下,根据纸箱1的位置驱动拆垛剪打包带机构1300去抓取纸箱1。
55.待纸箱1到达工作台上后,视觉机构1600对纸箱1进行拍照,然后第二控制机构2100对得到的第二图像进行分析,得到纸箱1外围的打包带的位置,然后机械臂1100在第二控制机构2100的控制下,根据打包带的位置驱动拆垛剪打包带机构1300去剪断打包带。
56.需要说明的是,在其他实施方式中,取料装置1000也可以不包括视觉机构1600,此时纸箱1在纸箱垛型10中的位置,纸箱1外围打包带的位置可以由作业人员提前输入机器人1000中。
57.考虑到对纸箱垛型10、放置在工作台上的纸箱1进行拍摄时所需要的拍摄视野不同,设置视觉机构1600包括第一视觉传感器1610以及第二视觉传感器1620。
58.其中,第一视觉传感器1610用于对纸箱垛型10进行拍照,以确定纸箱1的位置;第二视觉传感器1620用于对放置在工作台上的纸箱1 进行拍照,以确定所述纸箱1外围打包带的位置。
59.其中设置第一视觉传感器1610、第二视觉传感器1620分别对纸箱垛型10、放置在工作台上的纸箱进行拍照,相比较于采用变焦视觉传感器进行拍摄,可以节省设备成本。
60.其中为了保证第一视觉传感器1610拍摄的图像清晰,如图1所示,栈板放置区a还设置有照明机构1700,用于提供照明。
61.从上述内容可以看出,第二控制机构2100可以切换机械臂1100末端所连接的执行器,当需要拆垛、剪打包带时,第二控制机构2100控制机械臂1100所连接的执行器为拆垛剪打包带机构1300,在拆掉纸箱 1的箱盖后,如果纸箱1内部的原料为桶料,则第二控制机构2100控制机械臂1100所连接的执行器为抓取桶料机构1400,但是如果纸箱1内部的原料为袋料,则第二控制机构2100控制机械臂1100所连接的执行器为抓取袋料机构1500,其中,如图7所示,当拆垛剪打包带机构1300、抓取桶料机构1400或者抓取袋料机构1500处于闲置状态时,处于闲置状态的末端执行器可以被放置在工具台2200上。
62.另外,本技术还保护上述的拆垛剪打包带机构1300、抓取桶料机构 1400以及抓取
袋料机构1500,其具体结构可参见上述,在此不再赘述。
63.以上所述仅为本技术的实施例,并非因此限制本技术的专利范围,凡是利用本技术说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本技术的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1