一种基于自动化机器人的包装方法与流程
1.本发明涉及自动化包装技术领域,尤其涉及一种基于自动化机器人的包装方法。
背景技术:
2.自动化是指机器设备、系统或过程(生产、管理过程)在没有人或较少人的直接参与下,按照人的要求,经过自动检测、信息处理、分析判断、操纵控制,实现预期的目标的过程。
3.现有自动化包装线,采用多分段工序、多人参与流程到现在的包装线上,人工包装效率低,损耗高、质量标准不统一。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种基于自动化机器人的包装方法,从而解决现有技术中存在的问题。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种基于自动化机器人的包装方法,采用物品输送带、搬运机器人、装箱传送带、环形输送带和托盘进行包装,包括以下步骤:
7.s1、单件物品通过物品输送带输送至靠近搬运机器人一端,装箱传送带预先放置有包装箱;
8.s2、搬运机器人器通过吸盘吸取单件物品并旋转运送至包装箱内码放;
9.s3、包装箱内物品装满后进入环形输送带内封口并运送到环形输送带另一端头暂存;
10.s4、搬运机器人通过夹具将环形输送带端头的包装箱运送至托盘上堆垛。
11.优选地,所述夹具包括支撑板,支撑板转动连接在所述搬运机器人的摆动臂下端,所述支撑板一侧固定连接支板,所述支板固定连接水平气缸,所述水平气缸的伸缩杆固定连接夹板。
12.优选地,所述支撑板底部固定连接直线导轨,所述夹板上侧固定连接直线滑块,所述直线滑块与直线导轨滑动适配。
13.优选地,所述支撑板另一侧固定连接两个竖杆,两个竖杆下端固定连接横杆,所述横杆固定连接升降气缸,所述升降气缸的下端固定连接圆盘,所述圆盘下端固定连接多个吸盘。
14.优选地,所述支板底部设置第一托举组件,所述夹板底部设置第二托举组件,第一托举组件与第二托举组件结构相同并呈对称分布,所述第二托举组件包括驱动杆,所述驱动杆与夹板转动连接,所述驱动杆两端分别固定连接一个直角托板,夹板两端设置转动槽,直角托板位于转动槽内。
15.优选地,所述夹板底部设置避让槽,所述驱动杆中部固定连接联动齿轮,所述夹板的非夹持面设置导向槽,所述导向槽内滑动连接导向杆,导向杆上端装有支撑弹簧,导向杆
一侧设置齿槽,联动齿轮通过齿槽与导向杆相啮合。
16.优选地,所述导向杆下端转动连接滚轮。
17.优选地,所述直角托板内侧滑动连接挡块,所述挡块一侧设置第一斜面,所述挡块另一侧设置第二斜面,所述直角托板内部滑动连接支杆,支杆上端滑动连接导向套,支杆上端与导向套内壁装有第一弹簧,直角托板内部设置空腔,空腔内滑动连接滑板,滑板与空腔的内壁设置第二弹簧,导向套一端与滑板固定连接,滑板一侧固定连接插杆,所述转动槽的内壁设置插孔。
18.本发明的优点在于:本发明所提供的一种基于自动化机器人的包装方法通过物品输送带输送至靠近搬运机器人一端,装箱传送带预先放置有包装箱;搬运机器人器通过吸盘吸取单件物品并旋转运送至包装箱内码放;包装箱内物品装满后进入环形输送带内封口并运送到环形输送带另一端头暂存;搬运机器人通过夹具将环形输送带端头的包装箱运送至托盘上堆垛并自动码垛;
19.本发明通过使用对应的自动化设备,集开箱、箱外打带、封箱、产品封包、产品入箱、码垛等流水线,通过设定轨道、流程、所需包规参数由搬运机器人全程参与连接各环节,使流水线一气呵成,由传统的多分段工序、多人参与流程到现在的全自动化包装线,大大降低人工,提高效率、降低损耗、保障质量,统一标准。
附图说明
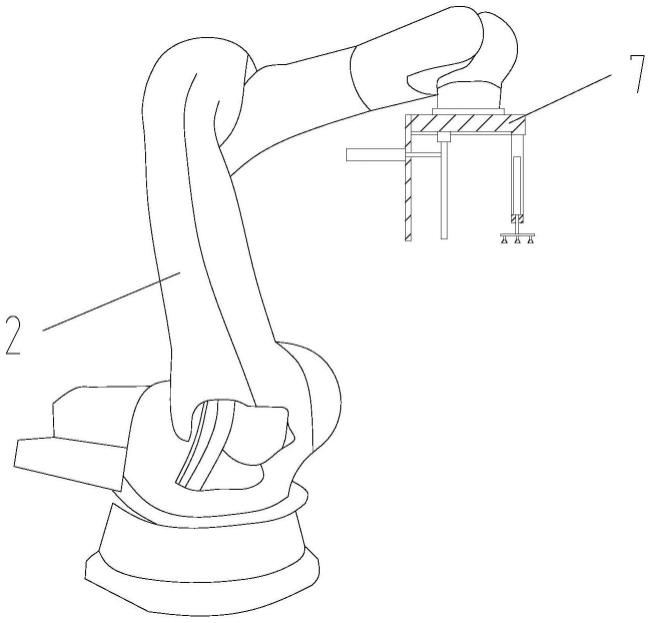
20.图1是本发明的搬运机器人的结构示意图;
21.图2是本发明的平面布置示意图;
22.图3是本发明中夹具的结构示意图;
23.图4是本发明中实施例2中的夹板的结构示意图;
24.图5是本发明中实施例2中的直角托板的连接结构示意图;
25.图6是图5中的m处局部放大图。
具体实施方式
26.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
27.实施例1
28.如图1-6所示,本发明提供的一种基于自动化机器人的包装方法,采用物品输送带1、搬运机器人2、装箱传送带3、环形输送带4和托盘5进行包装,搬运机器人2是近代自动控制领域出现的一项高新技术,涉及到了力学,机械学,电器液压气压技术,自动控制技术,传感器技术,单片机技术和计算机技术等学科领域,已成为现代机械制造生产体系中的一项重要组成部分,本发明使用搬运机器人2进行包装,包括以下步骤:
29.s1、单件物品通过物品输送带1输送至靠近搬运机器人2一端,装箱传送带3预先放置有包装箱;
30.s2、搬运机器人2器通过吸盘6吸取单件物品并旋转运送至包装箱内码放;
31.s3、包装箱内物品装满后进入环形输送带4内封口并运送到环形输送带4另一端头
暂存;
32.s4、搬运机器人2通过夹具7将环形输送带4端头的包装箱运送至托盘5上堆垛并自动码垛。
33.上述搬运机器人2的夹具7包括支撑板71,支撑板71转动连接在搬运机器人2的摆动臂下端,支撑板71一侧固定连接支板72,支板72固定连接水平气缸73,水平气缸73的伸缩杆固定连接夹板74。
34.支撑板71底部固定连接直线导轨75,夹板74上侧固定连接直线滑块76,直线滑块76与直线导轨75滑动适配,提高夹板74夹持方形包装箱的稳定性。
35.实施例2
36.在对包装箱进行夹持时,如果水平气缸73夹持力过大容易损伤包装箱内物品,如果水平气缸73夹持力小,而包装箱又超重,可能存在包装箱滑落的问题。
37.在实施例1的基础上,支撑板71另一侧固定连接两个竖杆77,两个竖杆77下端固定连接横杆78,横杆78固定连接升降气缸79,升降气缸79的下端固定连接圆盘791,圆盘791下端固定连接多个吸盘6,支板72底部设置第一托举组件,夹板74底部设置第二托举组件8,第一托举组件与第二托举组件8结构相同并呈对称分布,第二托举组件8包括驱动杆81,驱动杆81与夹板74转动连接,驱动杆81两端分别固定连接一个直角托板82,夹板74两端设置转动槽83,直角托板82位于转动槽83内,夹板74底部设置避让槽,驱动杆81中部固定连接联动齿轮84,夹板74的非夹持面设置导向槽85,导向槽85内滑动连接导向杆86,导向杆86上端装有支撑弹簧87,导向杆86一侧设置齿槽,联动齿轮84通过齿槽与导向杆86相啮合,导向杆86下端转动连接滚轮88。
38.通过导向杆86下端滚轮88触到环形输送带4的表面,随着导向杆86被压缩,通过联动齿轮84驱使驱动杆81将直角托板82向夹板74的非夹持面转动,夹板74将包装箱抱起后,滚轮88离开环形输送带4的表面,在支撑弹簧87的作用下使得联动齿轮84驱使驱动杆81将直角托板82回转,对包装箱形成预先防护,避免包装箱滑落,提高安全性。
39.直角托板82内侧滑动连接挡块821,挡块821一侧与其滑槽内壁固定连接第三弹簧8221,挡块821一侧设置第一斜面822,挡块821另一侧设置第二斜面823,直角托板82内部滑动连接支杆824,支杆824上端滑动连接导向套825,支杆824上端与导向套825内壁装有第一弹簧826,直角托板82内部设置空腔,空腔内滑动连接滑板827,滑板827与空腔的内壁设置第二弹簧828,导向套825一端与滑板827固定连接,滑板827一侧固定连接插杆829,转动槽83的内壁设置插孔831。
40.当包装箱形成滑落,包装箱的下端推动挡块821侧滑,第二斜面823作用到支杆824上端并推动滑板827和插杆829移动,由于插杆829与插孔831是需要在直角托板82与转动槽83内壁转动时才能伸出,因此支杆824与导向套825的间距可压缩,使得插杆829进入插孔831内,避免直角托板82的进一步转动,从而对滑落的包装箱进行托住,提高安全性。
41.本发明的单件物品通过物品输送带1输送至靠近搬运机器人2一端,装箱传送带3预先放置有包装箱;s2、搬运机器人2器通过吸盘6吸取单件物品并旋转运送至包装箱内码放;s3、包装箱内物品装满后进入环形输送带4内封口并运送到环形输送带4另一端头暂存;s4、搬运机器人2通过夹具7将环形输送带4端头的包装箱运送至托盘5上堆垛并自动码垛;使用对应的自动化设备,集开箱、箱外打带、封箱、产品封包、产品入箱、码垛等流水线,通过
设定轨道、流程、所需包规参数由搬运机器人2全程参与连接各环节,使流水线一气呵成,由传统的多分段工序、多人参与流程到现在的全自动化包装线,大大降低人工,提高效率、降低损耗、保障质量,统一标准。
42.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1