上盘系统
1.本发明涉及穴盘输送技术领域,尤其涉及一种上盘系统。
背景技术:
2.我国温室叶菜生产综合机械化程度较低,就将幼苗穴盘搬上栽培架,待其成熟后搬下栽培架的穴盘搬运而言主要有以下几种方式(1)人工搬运,依靠人力将穴盘搬上栽培架,搬运效率低,劳动强度大,对于多层栽培架的较高的层搬运困难,也不利于长距离运输。(2)单层大苗床大漂浮板,利用专用搬运设备进行穴盘搬运,此种方式在国外植物工厂较为常见,其优点是搬运效率高,一次可对多个穴盘实现搬运,自动化程度高,但其投入成本较大,需要专门的搬运机械,同时占地面积较大,培养灵活性较差。(3)栽培槽与穴盘一体化搬运,多层栽培架的每层都设立传送带,实现穴盘在每层栽培架上运动,搬上栽培架靠天车或是提升机构,此种方式可实现多层栽培架的取盘放盘,自动化程度高,但由于在每层栽培架都要安装电机,设备成本高,结构复杂。基于此,降低上盘系统的制造成本成为业内亟待解决的问题。
技术实现要素:
3.本发明提供一种上盘系统,用以解决现有技术中上盘系统制造成本高的缺陷。
4.本发明提供一种上盘系统,包括:上盘装置,设有第一框架;输送装置,所述输送装置用于输送穴盘;栽培架,用于放置所述穴盘;其中,所述上盘装置还包括:第一移动机构,与所述第一框架连接,所述第一移动机构能够沿水平方向移动;第二移动机构,与所述第一框架滑动连接,所述第二移动机构位于所述输送装置的上方,所述第二移动机构能够沿竖直方向移动;推送机构,与所述第二移动机构连接,所述推送机构位于所述第二移动机构的下方,所述推送机构用于将所述穴盘推送至所述栽培架;夹持机构,与所述推送机构连接,所述夹持机构位于所述推送机构的下方,用于将所述穴盘夹持。
5.根据本发明提供的一种上盘系统,所述第一框架包括第一组纵梁和第二组纵梁,所述第一组纵梁与所述第二组纵梁相对设置,所述第一移动机构包括:第一导轨;第一移动组件,与所述第一组纵梁连接,所述第一移动组件与所述第一导轨滚动连接;第二导轨,与所述输送装置连接,所述第二导轨与所述第一导轨平行设置;第二移动组件,与所述第二组纵梁连接,所述第二移动组件与所述第二导轨滚动连接。
6.根据本发明提供的一种上盘系统,所述第一框架包括:第一组纵梁、第二组纵梁和多个横梁,所述第一组纵梁与所述第二组纵梁相对设置,每个所述横梁的两端分别与相邻的两个纵梁连接,每个所述纵梁上设有滑轨,所述第二移动机构包括:第一驱动组件,与相对的两个所述横梁连接;齿条,与所述第一驱动组件传动连接;一对第一滑动件,每个所述第一滑动件分别与位于一侧的一对所述滑轨滑动连接;连接件,所述连接件的两端分别与所述滑块连接,所述连接件的顶面与所述齿条连接,所述连接件与所述齿条垂直设置。
7.根据本发明提供的一种上盘系统,所述推送机构包括:第二驱动组件,与所述连接
件连接,所述第二驱动组件包括第二滑动件,所述第二驱动组件能够带动所述第二滑动件向靠近所述栽培架的方向移动,以使所述穴盘与所述栽培架对正;推板框架,所述推板框架的顶面与所述第二滑动件连接;第三驱动组件,与所述推板框架的底面连接;推板,与所述第三驱动组件连接,所述第三驱动组件能够驱动所述推板向靠近所述栽培架的方向移动,以将所述穴盘推入所述栽培架。
8.根据本发明提供的一种上盘系统,所述夹持机构包括:第四驱动组件,与所述第三驱动组件连接;一对夹持件,一对所述夹持件相对设置,每个所述夹持件的第一端与所述第四驱动组件连接,每个所述夹持件的第二端用于夹持所述穴盘。
9.根据本发明提供的一种上盘系统,所述穴盘包括:栽培板,所述栽培板上设有多个通孔;多个定植杯,每个所述定植杯放置于一个所述通孔内,所述定植杯为圆台体结构。
10.根据本发明提供的一种上盘系统,所述夹持件包括第一本体和第二本体,所述第一本体与所述第二本体垂直设置,所述第一本体与所述第四驱动组件连接,所述第二本体包括:第一夹持部和第二夹持部,所述第二夹持部与所述输送装置之间的距离小于所述第一夹持部与所述输送装置之间的距离;其中,所述第一夹持部与所述栽培板接触,所述第二夹持部与所述定植杯的底面接触。
11.根据本发明提供的一种上盘系统,所述栽培架为多层栽培架,每层所述栽培架上设有多个栽培槽,每个所述栽培槽的两端设有堵头,靠近所述上盘装置的堵头的顶面设有开口,所述栽培槽用于放置所述穴盘。
12.根据本发明提供的一种上盘系统,所述栽培架还包括多个滚轮,多个所述滚轮设置于所述栽培槽的相对两侧,所述穴盘可在所述推送机构的作用下沿所述滚轮移动。
13.根据本发明提供的一种上盘系统,还包括:第一感应装置,设置于所述第一移动机构和所述栽培架;第二感应装置,设置于所述第二移动机构和所述栽培架;控制器,根据所述第一感应装置和所述第二感应装置发送的信号,控制所述第一移动机构和所述第二移动机构停止动作。
14.本发明提供的上盘系统,通过设置上盘装置和输送装置,可将穴盘自动搬运至栽培架,不需要人工操作,提高了搬运效率;同时,通过设置推送机构,推送机构将穴盘推送至栽培架上,不需要在栽培架上额外设置动力源实现穴盘在栽培架上的移动,降低了上盘系统的制造成本。
附图说明
15.为了更清楚地说明本发明或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
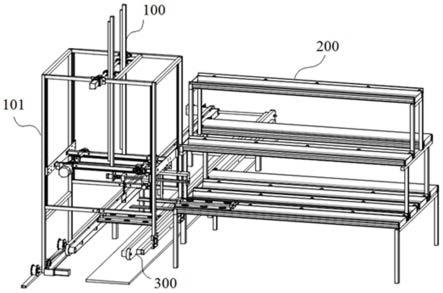
16.图1是本发明提供的上盘系统的结构示意图;
17.图2是图1中示出的上盘装置的结构示意图;
18.图3是图2中示出的第一移动机构的结构示意图;
19.图4是图3的正视图;
20.图5是图2中示出的第二移动机构的结构示意图;
21.图6是图2中示出的推送机构和夹持机构的结构示意图;
22.图7是图6的侧视图;
23.图8是图7中示出的夹持机构的结构示意图;
24.图9是图1中示出的栽培架的结构示意图;
25.图10是图9的侧视图;
26.附图标记:
27.100:上盘装置;101:第一框架;102:第一组纵梁;103:第二组纵梁;104:横梁;110:第一移动机构;120:第二移动机构;130:推送机构;140:夹持机构;200:栽培架;201:第二框架;202:栽培槽;203:堵头;204:滚轮;300:输送装置;400:穴盘;401:栽培板;402:定植杯;403:抓手;1100:导轨;1101:第一导轮;1102:第一电机支架;1103:第一电机;1104:第一链轮;1105:第二链轮;1106:支撑轮;1107:支撑轮支架;1108:第二导轮;1109:第二导轨;1200:滑轨;1201:第一滑动件;1202:第二电机;1203:第二电机支架;1204:齿轮;1205:齿条;1206:提升轴;1207:限位轮;1208:方管;1209:连接件;1210:限位轮安装架;1300:第三电机;1301:第三电机支架;1302:推进主动轴;1303:同步带;1304:第二滑动件;1305:推板框架;1306:第三驱动组件;1307:推板;1308:皮带轮;1400:第四驱动组件;1401:夹持件;1411:第一本体;1412:第二本体;14121:第一夹持部;14122:第二夹持部。
具体实施方式
28.为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.本发明的说明书和权利要求书中的术语“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
30.下面结合图1-图10描述本发明的上盘系统。
31.如图1和图2所示,在本发明的一个实施例中,上盘系统包括:上盘装置100、栽培架200以及输送装置300。上盘装置100设有第一框架101,输送装置300用于输送穴盘400,栽培架200用于放置穴盘400。
32.具体来说,上盘装置100包括:第一移动机构110、第二移动机构120、推送机构130以及夹持机构140。第一移动机构110与第一框架101连接,第一移动机构110能够沿水平方向移动,进而带动第一框架101沿水平方向移动,输送装置300固定在地面,用于将穴盘400输送至与栽培架200在水平方向相对正的位置。第二移动机构120位于第一移动机构110的上方,第二移动机构120也与第一框架101连接,第一框架101的纵梁上设有滑轨,第二移动机构120与该滑轨配合滑动,从而实现第二移动机构120可沿竖直方向移动。推送机构130位于第二移动机构120的下方,并与第二移动机构120连接,在第二移动机构120沿竖直方向移动时,可带动推送机构130沿竖直方向移动。夹持机构140位于推送机构130的下方,并与推送机构130连接,在第一移动机构110移动时,可带动夹持机构140移动至穴盘400的正上方,在第二移动机构120沿竖直方向移动时,可带动夹持机构140沿竖直方向移动,进而将穴盘
400夹持至与栽培架200相同的高度。
33.具体地,在将穴盘400搬运至栽培架200时,第一移动机构110沿水平方向移动,带动夹持机构140运动。输送装置300动作,使穴盘400与栽培架200在水平方向对正。第一移动机构110带动夹持机构140运动至穴盘400的正上方时,第一移动机构110停止动作。夹持机构140夹持穴盘400。第二移动机构120沿第一框架101向上滑动,进而带动推送机构130和夹持机构140一起向上移动,当穴盘400的高度与栽培架200的高度对正后,第二移动机构120停止动作。推送机构130动作,将穴盘400推入栽培架200上。
34.在本实施例中,输送装置300为皮带传送结构。
35.本发明实施例提供的上盘系统,通过设置上盘装置和输送装置,可将穴盘自动搬运至栽培架,不需要人工操作,提高了搬运效率;同时,通过设置推送机构,推送机构将穴盘推送至栽培架上,不需要在栽培架上额外设置动力源实现穴盘在栽培架上的移动,降低了上盘系统的制造成本。
36.如图3所示,在本发明的一个实施例中,第一框架101包括第一组纵梁102和第二组纵梁103,第一移动机构110包括:第一导轨1100、第一移动组件、第二导轨1109以及第二移动组件。第一移动组件与第一框架101的第一组纵梁102连接,第一移动组件与第一导轨1100滚动连接。第二导轨1109与输送装置300连接,且第二导轨1109与第一导轨1100平行设置。第二移动组件与第一框架101的第二组纵梁103连接,第二移动组件与第二导轨1109滚动连接。
37.具体来说,在本实施例中,第一移动组件为主动侧,第一移动组件包括:第一导轮1101、第一电机支架1102、第一电机1103、第一链轮1104、第二链轮1105和第二导轮1108。第一电机1103安装在第一电机支架1102,第一电机支架1102与第一组纵梁102中的一个纵梁连接,第一电机1103通过联轴器与第一导轮1101连接,为第一导轮1101滚动提供动力。第一导轮1101的两边设有挡边,以避免第一导轮1101在沿第一导轨1100滚动时脱轨。第一链轮1104与第二链轮1105通过链传动连接,第一电机1103还用于为第一链轮1104转动提供动力,第二链轮1105与第二导轮1108连接,在第一电机1103转动时,第一链轮1104带动第二链轮1105转动,进而带动第二导轮1108沿第一导轨1100滚动。进一步地,第二导轮1108的两边也设有挡边。第二链轮1105与第二导轮1108的连接轴贯穿第二组纵梁103中的另一条纵梁,在第一移动组件沿第一导轨1100滚动时,可以带动第一框架101的第一组纵梁102移动。
38.输送装置300包括两个皮带传送机构,穴盘400的两侧放置在两个皮带传送机构上。
39.第二移动组件为从动侧。第二移动组件包括:支撑轮1106、支撑轮支架1107以及第二导轨1109。第二导轨1109与输送装置300连接,并与第一导轨1100平行,支撑轮支架1107用于固定支撑轮1106,多个支撑轮1106分别设置在第二导轨1109的上表面以及下表面,支撑轮支架1107与第二组纵梁103连接,在支撑轮1106沿第二导轨1109滚动时,可带动第一框架101的第二组纵梁103沿水平方向移动。
40.如图4所示,穴盘400包括:栽培板401和定植杯402。栽培板401上设有多个通孔,每个通孔内设置有定植杯402,其中,定植杯402为圆台体结构。
41.具体来说,栽培板401采用pvc材料,栽培板401上开设有两排6个圆孔,用于放置定植杯402。定植杯402为圆台体结构,以便于放入圆孔内。同时,每个定植杯402的底面开设有
透气孔,在将穴盘400放入栽培架200后,以便植物根系可以通过透气孔吸收水分。进一步地,栽培板401的相对两侧还设有抓手403,抓手403的高度约4-5cm,以便于将穴盘400叠放运输。
42.进一步地,在输送装置300输送穴盘400时,栽培板401的两侧放置在皮带传送结构上,定植杯402悬空,夹持机构140夹持穴盘时,由栽培板401与输送装置300接触的两侧夹持。
43.如图5所示,在本发明的一个实施例中,第一框架101包括:第一组纵梁102、第二组纵梁103和多个横梁104。第一组纵梁102与第二组纵梁103相对设置,每个横梁104的两端分别与相邻的两个纵梁连接,每个纵梁上设有滑轨。
44.第二移动机构包括:第一驱动组件、齿条1205、一对第一滑动件1201以及连接件1209。第一驱动组件与相对的两个横梁104连接,齿条1205与第一驱动组件传动连接,在第一驱动组件的作用下,齿条1205能够沿竖直方向上下运动。齿条1205的底部与连接件1209连接。第一组纵梁102以及第二组纵梁103上均设有滑轨1200,一对第一滑动件1201分别与第一组纵梁102以及第二组纵梁103连接,连接件1209的两端分别与一对第一滑动件1201连接,在第一驱动组件的作用下,齿条1205沿竖直方向移动,进而带动第一滑动件1201沿滑轨1200滑动。
45.进一步地,第一驱动组件包括:第二电机1202、第二电机支架1203、齿轮1204以及提升轴1206。第二电机支架1203与相对的两个横梁104连接,第二电机1202安装于第二电机支架1203,第二电机1202通过联轴器与提升轴1206连接,提升轴1206上设有齿轮1204,齿轮1204与齿条1205啮合。当第二电机1202转动时,带动提升轴1206转动,进而带动齿轮1204转动,齿轮1204与齿条1205啮合,带动齿条1205沿竖直方向运动,进而可以带动连接件1209向上运动,从而带动夹持机构140向上运动。
46.进一步地,在本发明的另一个实施例中,第二移动机构还包括:方管1208、限位轮1207和限位轮安装架1210。方管1208的一端与连接件1209连接,方管1208的一侧设有齿条1205,齿条1205与齿轮1204啮合。限位轮安装架1210与提升轴1206平行设置,限位轮安装架1210的两端与一对横梁104连接,限位轮安装架1210上设有限位轮1207,限位轮1207与方管1208未设有齿条1205的一侧接触,形成限位作用,以保证齿轮1204与齿条1205传动时的稳定性。
47.如图6所示,在本发明的一个实施例中,推送机构130包括:第二驱动组件、推板框架1305、第三驱动组件1306以及推板1307。第二驱动组件与连接件1209连接,在连接件1209沿竖直方向上下运动时,能够带动第二驱动组件一起沿竖直方向上下运动。第二驱动组件包括第二滑动件1304,第二驱动组件能够带动第二滑动件1304向靠近栽培架200的方向移动,以使穴盘400与栽培架200靠近。推板框架1305的顶面与第二滑动件1304连接,第二滑动件1304能够带动推板框架1305向靠近栽培架200的方向移动。第三驱动组件1306与推板框架1305的底面连接,推板1307与第三驱动组件1306连接,在第三驱动组件1306的作用下能够驱动推板1307向靠近栽培架200的方向移动,从而将穴盘400推入栽培架200内。
48.具体来说,夹持机构140与第三驱动组件连接,在第一驱动组件的作用下,连接件1209向上运动,进而带动第二驱动组件、推板框架1305、第三驱动组件1306以及夹持机构140向上运动,使穴盘400的高度与栽培架200的高度一致。第二驱动组件动作,带动第二滑
动件1304向靠近栽培架200的方向移动,进而带动穴盘400靠近栽培架,使穴盘400与栽培架200的端面对齐。此时,第三驱动组件1306动作,带动推板1307向靠近栽培架200的方向运动,推板1307推动穴盘400进入栽培架200上,实现穴盘400的自动搬运。在本实施例中,由于推进方向上运动行程较长,若采用一次推送无法同时兼顾效率与推进运动过程中定植杯402的稳定性,且推送机构130体积较大,因此,将推送运动拆分为两次推送运动,第一次推送由第二驱动组件、第二滑动件1304以及推板框架1305实现,第二次推送由第三驱动组件1306以及推板1307实现。
49.进一步地,第二驱动组件包括:第三电机1300、第三电机支架1301、一对推进主动轴1302、一对皮带轮1308以及同步带1303。一对推进主动轴1302相对设置,每个推进主动轴1302的两端与连接件1209转动连接,第三电机1300安装在第三电机支架1301,第三电机1300与推进主动轴1302连接,第三电机1300转动时可以带动推进主动轴1302转动,每个推进主动轴1302上设有一个皮带轮1308,两个皮带轮1308通过同步带1303连接,第二滑动件1304与同步带1303连接,在同步带1303传动过程中,可以带动第二滑动件1304向靠近栽培架200的方向移动,进而带动推板框架1305移动。夹持机构140与第三驱动组件1306连接,在推板框架1305移动时,可带动夹持机构140向靠近栽培架200的方向移动,使穴盘400靠近栽培架200。
50.如图7所示,第三驱动组件1306设置在推板框架1305的下表面,第三驱动组件1306为滚珠丝杠模组,具体包括:电机和丝杠,电机转动时带动丝杠转动,推板1307与丝杠连接,进而带动推板1307向靠近栽培架200的方向移动,推板1307推动穴盘400,将穴盘400推送至栽培架200上。
51.本发明实施例提供的上盘系统,通过设置推动机构,可将穴盘由上盘装置推送至栽培架上,避免了在栽培架上额外设置驱动组件带动穴盘移动,降低了栽培架的成本,进而降低了上盘系统的生产成本。
52.如图7所示,在本发明的一个实施例中,夹持机构140包括:第四驱动组件1400和一对夹持件1401。第四驱动组件1400与第三驱动组件1306连接,一对夹持件1401相对设置,每个夹持件1401的第一端与第四驱动组件1400连接,每个夹持件1401的第二端用于夹持穴盘400。
53.具体来说,在第二驱动组件向靠近栽培架200的方向移动时,可带动夹持件1401向靠近栽培架200的方向移动,以实现穴盘400的第一次推进。一对夹持件1401用于夹持穴盘400。第四驱动组件1400为滚珠丝杠模组,其具体结构与第三驱动组件相同,故不再赘述,在本实施例中,第四驱动组件1400的丝杠为双向丝杠,在第四驱动组件1400的作用下,一对夹持件1401可实现相向的抓紧以及放松运动,进而实现将穴盘400夹持,以及解除夹持。
54.进一步地,如图8所示,在本实施例中,定植杯402的底面位于栽培板401的下方,在将穴盘400推送至栽培架200时,由于定植杯402的位置较低,会与栽培架200的端面发生干涉,因此,在夹持件1401夹持穴盘400时,应将定植杯402的底面抬起,使得定植杯402底面高于栽培槽202的堵头203顶部的开口处,避免在二次推送过程中,定植杯402侧壁与栽培槽202的堵头203发生干涉。
55.具体地,在本实施例中,夹持件1401包括第一本体1411和第二本体1412,第一本体1411与第二本体1412垂直设置,第一本体1411与第四驱动组件1400连接。第二本体1412包
括:第一夹持部14121和第二夹持部14122,第二夹持部14122与输送装置300之间的距离小于第一夹持部14121与输送装置300之间的距离,其中,第一夹持部14121与栽培板401接触,第二夹持部14122与定植杯402的底面接触。
56.具体来说,在本实施例中,夹持件1401为l形结构。在将穴盘400夹持时,第二夹持部14122先与定植杯402的底部接触,将定植杯402抬起一定高度,然后第一夹持部14121与栽培板401接触,在第二移动机构120的作用下,夹持件1401夹持穴盘400向上运动。
57.如图9所示,在本发明的一个实施例中,栽培架200为多层栽培架,每层的栽培架200上设有多个栽培槽202,每个栽培槽202的两端设有堵头203,靠近上盘装置100的堵头203的顶面设有开口,其中,栽培槽202用于放置穴盘400。
58.具体来说,栽培架200包括第二框架201,第二框架201分为多层,使栽培架200具有多层结构。每层的栽培架200上均设置有多个栽培槽202,多个栽培槽202平行设置,每个栽培槽202为u形结构,栽培槽202的材质为pvc,每个栽培槽202的长度为4m,多个栽培槽202相互连接,组成一条较长的栽培槽202,放置在栽培架200上。每个栽培槽202靠近上盘装置100的一侧的堵头203上设有开口,开口的尺寸为1-2cm,以避免将穴盘400推送时,定植杯402与堵头203发生干涉。
59.进一步地,如图10所示,栽培架200还包括多个滚轮204,多个滚轮204设置在栽培槽202的相对两侧,滚轮204为无动力滚轮,多个滚轮204形成流利条,穴盘400可在推送机构130的作用下沿滚轮204移动,移动至栽培架200的合适位置。
60.本发明实施例提供的上盘系统,通过将夹持件的第二本体设置为第一夹持部和第二夹持部,第二夹持部与输送装置之间的距离小于第一夹持部与输送装置之间的距离,在将穴盘夹持时,第二夹持部可先将定植杯顶起一定高度,避免了穴盘沿栽培槽滑动时,定植杯与栽培槽的堵头之间发生干涉,提高了上盘效率。
61.在本发明的一个实施例中,上盘系统还包括:第一感应装置、第二感应装置和控制器。第一感应装置设置于第一移动机构110和栽培架200,第二感应装置设置于第二移动机构120和栽培架200,控制器根据第一感应装置和第二感应装置发送的信号,控制第一移动机构110和第二移动机构120停止动作。
62.具体来说,在本实施例中,第一感应装置为第一感应块。第一接近开关安装于待上架穴盘400所对应放入的栽培槽202的顶端堵头203处,第一感应块安装于第一移动机构110,第一移动机构110沿水平方向移动,当第一感应块感应到第一接近开关时,第一感应块发送信号至控制器,控制器控制第一移动机构110停止动作,此时,输送装置300控制皮带将待上架穴盘400输送到一对夹持件1401正下方,使得夹持机构140、待上架穴盘400与目标栽培架200上的栽培槽202水平位置上对正。
63.第二感应装置包括:第二感应块和第二接近开关,第二感应块设置在第二移动机构120,第二接近开关设置于栽培架200。当穴盘400与栽培槽202的位置对正后,夹持件1401将穴盘400夹持,第二移动机构带动夹持件1401向上运动,当穴盘400的高度与所要放置的栽培槽202的高度一致时,第二感应块发送信号至控制器,控制器控制第二移动机构120停止动作。此时,推送机构130将穴盘400推入对应的栽培槽202。
64.本发明实施例提供的上盘系统,通过设置第一感应装置和第二感应装置,可对穴盘的位置进行精准定位,提高了上盘效率。
65.以下举例,详细说明本发明提供的上盘系统的工作原理。
66.当需要将待上架的穴盘400搬运至栽培架200时,第一电机1103驱动第一导轮1101沿第一导轨1100移动,当第一移动机构110移动至目标栽培架200所在的水平位置时,第一感应块发送信号至控制器,控制器控制第一电机1103停止转动。输送装置300控制皮带将穴盘400移动到目标栽培架200所在的水平位置,即待上架穴盘400位于一对夹持件1401的正下方,待上架穴盘400与目标栽培槽200水平方向上处于一条直线。第四驱动组件1400驱动一对夹持件1401相向运动,将穴盘400夹持。
67.第二电机1202驱动齿轮1204转动,齿轮1204与齿条1205传动连接,进而带动连接件1209、推送机构130以及夹持件1401、穴盘400一起向上运动。当穴盘400的高度与所要放置的栽培槽202的高度相同时,第二感应块发送信号至控制器,控制器控制第二电机1202停止转动。
68.第三电机1300驱动皮带轮1308转动,进而带动推板框架1305向靠近栽培槽202的方向运动,推板框架1305带动第四驱动组件1400和夹持件1401以及穴盘400向靠近栽培槽202的方向运动,当穴盘400与栽培槽202的堵头203对齐时,第三驱动组件1306带动推板1307向靠近栽培槽202的方向运动,推板1307推动穴盘400至栽培槽202,穴盘400的栽培板401沿滚轮204滑动,以将穴盘400移动至栽培槽202的合适位置。
69.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1