检测装置、检测方法以及计算机可读介质与流程
1.本发明涉及检测装置、检测方法和计算机可读介质。
背景技术:
2.在日本专利第4133702号公报中公开了一种图像形成装置,其特征在于,具有:图像形成部,其用于进行图像形成;纸张翻转部,其用于进行双面印刷;引导单元,其用于在所述纸张翻转部保持纸张的位置;以及纸张位置保持单元,在对纸张输送方向上的纸长比所述纸张翻转部内的输送路径长更长的纸张进行了走纸输送的情况下,从纸张整体被收纳于所述输送路径而输送动作停止且纸张后端到达翻转开始位置的时刻起,利用所述引导单元继续保持纸张的位置,在能够进行下一个图像形成动作的时刻结束所述保持而释放纸张。
3.在日本特开2017-114659号公报中公开了一种片材长度测定装置,其具有:旋转体,其与片材接触并进行旋转;测定机构,其测定所述旋转体的旋转量;以及位置检测机构,其在所述片材的输送方向上分别设置于所述旋转体的上游侧和下游侧,所述片材长度测定装置的特征在于,所述位置检测机构具有排列设置有多个检测部件的检测部件列,所述位置检测机构跨越所述片材的宽度方向的侧端而配置,并且被配置为相对于所述片材的输送方向设置得倾斜,根据由所述测定机构测定出的所述旋转体的旋转量和由所述位置检测机构检测出的所述片材的端部位置来测定所述片材的片材长度。
技术实现要素:
4.本发明的目的在于,与对正在被输送的介质的前端部和后端部进行检测并根据介质在输送方向上的长度而对与输送方向正交的方向上的介质的长度进行估计的情况相比,能够高精度地对正在被输送的介质的与输送方向正交的方向上的介质的两端部的位置进行检测。
5.根据本发明的第一方案,提供一种检测装置,其具备:第一检测部,其对正在被输送的介质的前端部和后端部进行检测;以及第二检测部,其对正在被输送的所述介质的与输送方向正交的正交方向上的两端部进行检测。
6.根据本发明的第二方案,所述检测装置具有:输送部,其对所述介质进行输送;以及抵接部,其相对于所述输送部设置于输送方向下游侧,并与所述输送部所输送的所述介质的前端抵接,所述第二检测部相对于所述抵接部设置于输送方向下游侧。
7.根据本发明的第三方案,所述第二检测部被分割为检测所述介质的正交方向上的一个端部的部分和检测另一端部的部分,并且被配置为在所述正交方向上对置。
8.根据本发明的第四方案,在所述正交方向上分割配置的所述第二检测部的至少一个检测部检测所述介质在所述正交方向上的位置偏移量。
9.根据本发明的第五方案,所述检测装置具备供所述介质的前端抵接的抵接部,所述第一检测部相对于所述抵接部设置于输送方向上游侧。
10.根据本发明的第六方案,所述第一检测部具有:前端检测部,其检测正在被输送的
介质的前端部;以及后端检测部,其具有沿着所述输送方向配置的多个检测元件,检测所述正在被输送的介质的后端部,该后端检测部的配置于所述输送方向上的最上游侧的所述检测元件与所述前端检测部之间的距离比最大尺寸的介质的输送方向长度短。
11.根据本发明的第七方案,所述第一检测部具有两组在输送方向上观察时重叠配置的所述前端检测部和所述后端检测部。
12.根据本发明的第八方案,所述输送部以比所述前端检测部的输送方向上游侧处的输送速度慢且恒定的输送速度输送介质,所述前端检测部和所述后端检测部分别检测处于被所述输送部输送的状态下的介质的前端部和后端部。
13.根据本发明的第九方案,所述检测装置具备上游侧输送部,所述上游侧输送部能够向夹持所述介质的夹持位置和与所述介质分离的分离位置移动,在位于所述夹持位置的状态下输送所述介质,并且相对于所述输送部配置于输送方向上游侧,所述前端检测部和所述后端检测部分别在所述上游侧输送部位于所述分离位置的状态下检测所述介质的前端部和后端部。
14.根据本发明的第十方案,提供一种检测方法,包含:检测正在被输送的介质的前端部和后端部的步骤;以及检测正在被输送的所述介质的与输送方向正交的正交方向上的两端部的步骤。
15.根据本发明的第十一方案,提供一种计算机可读介质,存储有使计算机执行处理的程序,其中,所述处理包含:检测正在被输送的介质的前端部和后端部的步骤;以及检测正在被输送的所述介质的与输送方向正交的正交方向上的两端部的步骤。
16.(效果)
17.根据所述第一方案,能够高精度地对输送中的介质的与输送方向正交的方向上的介质的两端部的位置进行检测。
18.根据所述第二方案,与第二检测部相对于抵接部被设置在输送方向上游侧的情况相比,提高了第二检测部对介质的两端部进行检测的检测精度。
19.根据所述第三方案,与第二检测部不被分割而由从介质的正交方向的一端部侧朝向另一端部侧延伸的单个检测部构成的情况相比,能够避免在介质中的正交方向上的两端部的检测中所不需要的区域配置检测部。
20.根据所述第四方案,与相对于第二检测部另外配置对介质的正交方向上的位置偏移量进行检测的检测部的情况相比,能够减少部件数量。
21.根据所述第五方案,与第一检测部相对于抵接部而被设置在输送方向下游侧的情况相比,能够抑制在由第一检测部进行检测时对被抵接部调整过姿态的介质的影响。
22.根据所述第六方案,与后端检测部中的被配置于输送方向上的最上游侧的检测元件与前端检测部之间的距离比最大尺寸的介质的输送方向长度长的情况相比,能够将检测装置按照输送方向长度小型化。
23.根据所述第七方案,与配置一组从输送方向观察时重叠配置的前端检测部和后端检测部的情况相比,介质的前端部和后端部的检测精度高。
24.根据所述第八方案,与前端检测部和后端检测部分别检测由如下上游侧输送部进行输送的状态下的介质的前端部和后端部的情况相比,介质的前端部和后端部的检测精度高,所述上游侧输送部一边使输送速度从前端检测部的输送方向上游侧处的输送速度起逐
渐降低一边输送介质。
25.根据所述第九方案,与前端检测部和后端检测部分别在上游侧输送部位于夹持位置的状态下检测介质的前端部和后端部的情况相比,能够降低作用于介质的负荷(即压力)。
26.根据所述第十方案,能够高精度地对输送中的介质的与输送方向正交的方向上的介质的两端部的位置进行检测。
27.根据所述第十一方案,能够高精度地对输送中的介质的与输送方向正交的方向上的介质的两端部的位置进行检测。
附图说明
28.图1是示出本实施方式的图像形成装置的结构的示意图。
29.图2是表示在本实施方式的图像形成装置中使用电子照相式的图像形成部时的结构的示意图。
30.图3是表示在本实施方式的图像形成装置中将介质收纳部配置在输送路径的侧方侧时的结构的示意图。
31.图4为表示本实施方式的检测装置的结构的侧剖视图。
32.图5为表示本实施方式的检测装置的结构的俯视图。
33.图6为表示本实施方式的检测装置的结构的侧剖视图。
34.图7是表示本实施方式的控制装置的硬件结构的一例的框图。
35.图8是表示本实施方式的控制装置的处理器的功能结构的一例的框图。
36.图9是表示本实施方式的检测装置的时序图的图。
37.图10是对存在裁剪误差的介质的输送方向长度的测定进行说明的图。
38.图11是对斜行的介质的输送方向长度的测定进行说明的图。
39.图12是对介质的宽度方向长度的测定进行说明的图。
40.图13是对检测介质的输送方向下游侧部分的侧端部的情况进行说明的图。
41.图14是对检测介质的输送方向上游侧部分的侧端部的情况进行说明的图。
具体实施方式
42.以下,基于附图对本发明的实施方式的一例进行说明。
43.(图像形成装置10)
44.对本实施方式的图像形成装置10的结构进行说明。图1是示出本实施方式的图像形成装置10的结构的示意图。
45.此外,图中所示的箭头up表示装置的上方(铅垂上方),箭头do表示装置的下方(铅垂下方)。另外,图中所示的箭头lh表示装置的左方,箭头rh表示装置的右方。另外,图中所示的箭头fr表示装置的前方,箭头rr表示装置的后方。这些方向是为了便于说明而规定的方向,因此装置结构并不限定于这些方向。另外,在装置的各方向上,有时省略“装置”这一词语来表示。即,例如,有时将“装置的上方”仅表达为“上方”。
46.另外,在下述的说明中,有时将“上下方向”按照“上方和下方这双方”或“上方和下方中的任一方”的意思使用。有时将“左右方向”按照“右方和左方这双方”或“右方和左方中
的任一方”的意思使用。“左右方向”也可以称为横向、水平方向。有时将“前后方向”按照“前方和后方这双方”或“前方和后方中的任一方”的意思使用。前后方向相当于后述的宽度方向,而且也可以称为横向、水平方向。另外,上下方向、左右方向、前后方向是相互交叉的方向(具体而言是正交的方向)。
47.另外,在图中的
“○”
中记载有
“×”
的记号是指从纸面的近前朝向里侧的箭头。另外,在图中的
“○”
中记载有“·”的记号是指从纸面的里侧朝向近前的箭头。
48.图1所示的图像形成装置10是形成图像的装置。具体而言,图像形成装置10是使用油墨在介质p上形成图像的喷墨式的图像形成装置。更具体而言,如图1所示,图像形成装置10具有图像形成装置主体11、介质收纳部12、介质排出部13、图像形成部14、加热部19、输送机构20、检测装置500以及控制装置160。
49.以下,对介质p、图像形成装置10的各部、以及图像形成装置10中的图像形成动作等进行说明。
50.(介质p)
51.介质p是由图像形成部14形成图像的对象。作为介质p的种类,例如有纸张以及膜等。作为纸张,例如有厚纸、铜版纸等。作为膜,例如有树脂制膜、金属制膜等。在本实施方式中,作为介质p例如使用纸张。此外,作为介质p的种类,不限于上述种类,能够使用各种种类的介质p。
52.作为介质p的尺寸(即,大小),例如使用a3nobi以上的例如包含a2、a1、a0、b系列等在内的尺寸。另外,作为介质p的尺寸,并不限定于前述的尺寸,能够使用各种尺寸的介质p。
53.在此,将介质p的沿着输送方向的长度称为输送方向长度。将与介质p的输送方向交叉的交叉方向(具体而言为正交方向)称为宽度方向,将沿着介质p的宽度方向的长度称为宽度方向长度。另外,宽度方向是正交方向的一例。另外,在各图中,适当地用箭头h表示输送方向。
54.此外,在本实施方式中,有时将介质p的输送方向上的上游侧的端部称为后端部或上游端部。另外,有时将介质p的输送方向上的下游侧的端部称为前端部或下游端部。另外,有时将介质p的宽度方向上的端部称为侧端部。
55.(图像形成装置主体11)
56.如图1所示,图像形成装置主体11是设置有图像形成装置10的各结构部的部分。具体而言,例如,介质收纳部12、图像形成部14、加热部19、输送机构20以及检测装置500配置于图像形成装置主体11的内部。
57.在图像形成装置主体11上以能够拆卸的方式配置有检测装置500。换言之,检测装置500能够相对于图像形成装置主体11装卸。
58.(介质收纳部12)
59.介质收纳部12是在图像形成装置10中收纳介质p的部分。收纳于该介质收纳部12的介质p向图像形成部14被供给。
60.(介质排出部13)
61.介质排出部13是在图像形成装置10中供介质p排出的部分。被图像形成部14形成了图像的介质p被排出到该介质排出部13。
62.(图像形成部14)
63.图1所示的图像形成部14是在介质p上形成图像的图像形成部的一例。具体而言,图像形成部14使用油墨而在介质p上形成图像。更具体而言,如图1所示,图像形成部14具有喷出部15y、15m、15c、15k(以下,称为15y~15k)、转印体16、以及与转印体16对置的对置部件17。
64.在图像形成部14中,各喷出部15y~15k将黄色(y)、品红色(m)、青色(c)、黑色(k)的各色的墨滴喷出到转印体16,在转印体16上形成图像。并且,在图像形成部14中,将形成于转印体16的各色的图像转印到通过转印体16与对置部件17之间的转印位置ta的介质p。由此,在介质p上形成图像。转印位置ta也可以说是在介质p上形成图像的图像形成位置。
65.另外,作为图像形成部的一例,不限于图像形成部14的结构。作为图像形成部的一个例子,例如也可以是各喷出部15y~15k不经由转印体16而直接向介质p喷出墨滴的结构。
66.(图像形成部214)
67.作为图像形成部的一个例子,如图2所示,也可以使用利用调色剂在介质p上形成图像的电子照相式的图像形成部214。
68.如图2所示,图像形成部214具有调色剂像形成部215y、215m、215c、215k(以下,称为215y~215k)、转印体216以及转印部件217。
69.在图像形成部214中,各调色剂像形成部215y~215k进行带电、曝光、显影、转印的各工序,在转印体216上形成黄色(y)、品红色(m)、青色(c)、黑色(k)的各色的调色剂像。转印部件217将形成在转印体216上的各色的调色剂像转印到通过转印体216和转印部件217之间的转印位置ta的介质p上。由此,在介质p上形成图像。这样,作为图像形成装置的一例,可以是电子照相式的图像形成装置。
70.另外,作为图像形成部的一例,例如也可以是各调色剂像形成部215y~215k不经由转印体216而直接在介质p上形成调色剂像的结构。
71.(加热部19)
72.图1所示的加热部19为对通过图像形成部14而形成有图像的介质p进行加热的加热部的一个示例。作为一个示例,加热部19通过加热源(省略图示)而以与介质p不接触的方式对介质p进行加热,从而使由油墨形成的图像干燥。
73.作为加热部的一例,不限于上述的加热部19。作为加热部的一例,例如,也可以为在不影响图像的范围内与介质p接触而对介质p进行加热的装置,并且能够使用各种加热部。
74.在具备图像形成部214的电子照相式的图像形成装置中,加热部19例如作为通过加热来对调色剂像进行定影的定影装置发挥功能。
75.(输送机构20)
76.输送机构20是输送介质p的机构。作为一个示例,输送机构20通过输送辊等输送部件29对介质p进行输送。此外,作为输送部件29,也可以是输送带等,只要是能够对介质p赋予输送力而输送介质p的部件即可。
77.输送机构20从介质收纳部12向图像形成部14(具体而言,转印位置ta)输送介质p。并且,输送机构20从图像形成部14向加热部19输送介质p。并且,输送机构20从加热部19向介质排出部13输送介质p。另外,输送机构20从加热部19向图像形成部14输送介质p。
78.因此,在图像形成装置10中形成有从介质收纳部12到图像形成部14为止的输送路
径21、从图像形成部14到加热部19为止的输送路径22、以及从加热部19到介质排出部13为止的输送路径23。并且,在图像形成装置10中形成有从加热部19到图像形成部14为止的输送路径24。
79.输送路径24是使在一个面上形成有图像的介质p返回到图像形成部14(具体而言,转印位置ta)的输送路径。另外,输送路径24也是使在一个面上形成有图像的介质p的正反面翻转的输送路径。
80.输送路径21和输送路径24的一部分(具体而言,输送方向下游侧的部分)被共用。因此,能够理解为如下结构,从介质收纳部12输送介质p的输送路径25与输送路径24连接,并从介质收纳部12向输送路径24供给介质p。因此,能够将输送路径25与输送路径24连接的连接位置理解为来自介质收纳部12的新的介质p向图像形成部14对输送路径24供给的供给位置25a。换言之,在本实施方式中,从供给位置25a经由输送路径24向图像形成部14供给介质p。
81.(图像形成装置10中的图像形成操作)
82.在图像形成装置10中,介质p从介质收纳部12通过输送路径21向图像形成部14(具体而言,转印位置ta)输送,通过图像形成部14在该介质p的一个面(即正面)形成图像(以下有时称为“正面图像”)。在仅在介质p的单面上形成图像的情况下,在一个面上形成有正面图像的介质p经由加热部19而向介质排出部13被排出。
83.另一方面,在介质p的两面上形成图像的情况下,在一个面上形成有正面图像的介质p经由加热部19而在输送路径24上被输送,从而正反面被翻转并返回至图像形成部14(具体而言,转印位置ta)。然后,通过图像形成部14在介质p的另一面(即背面)上形成图像,之后,经由加热部19而向介质排出部13排出。这样,介质p的一个面和另一个面是形成图像的图像形成面。
84.(介质收纳部12的位置)
85.如图1所示,介质容纳部12相对于输送路径24配置在下方侧。因此,是从下方侧对输送路径24的供给位置25a供给介质收纳部12的介质p。
86.此外,如图3所示,介质容纳部12也可以配置在相对于输送路径24的侧方侧。在该情况下,从侧方侧(图3中的右方侧)对输送路径24的供给位置25a供给介质收纳部12的介质p。在图3所示的结构中,介质收纳部12配置在相对于图像形成部14(具体而言,转印位置ta)的侧方侧。由此,从侧方侧对图像形成部14(具体而言,转印位置ta)供给介质p。此外,在图3中,省略了图像形成装置主体11的图示。
87.(检测装置500)
88.图1所示的检测装置500为对介质p的端部进行检测的检测装置的一个示例。另外,在图1中,简化示出了检测装置500。
89.图4是表示检测装置500的结构的侧剖视图。图5是表示检测装置500的结构的俯视图。另外,在图4~图6、图10~图14中,以装置相对于图1~3而左右反转的状态进行图示。即,在图4~图6、图10~图14中,装置的左右图示为与纸面中的左右相反的方向。
90.在此,在检测装置500中,“检测端部”并不限定于直接检测介质p自身的端部(即边缘),例如,也包括检测附加于介质p的端部的标记(例如,裁剪标记等)的情况。该标记被标注在距介质p的端部为预定的距离的位置,距介质p的端部的距离是已知的。
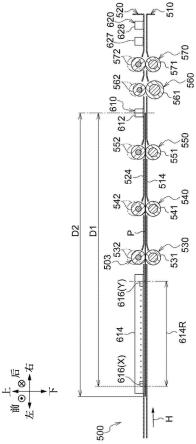
91.如图4所示,检测装置500具备第一支承体510、第二支承体520、输送机构503、检测部610、620以及前端传感器627。在以下,对检测装置500的各部分的结构进行说明。
92.(第一支承体510)
93.图4所示的第一支承体510具有支承输送机构503的一部分(具体而言,后述的驱动辊531、541、551、561、571)的功能。
94.如图4所示,第一支承体510构成检测装置500的下方侧的部分。作为一个例子,该第一支承体510形成为在上下方向上较薄、在前后方向以及左右方向上扩展的扁平形状。
95.第一支承体510具有对介质p进行引导的引导板514。引导板514与介质p的下表面对置,将由输送机构503输送的介质p向输送方向下游侧引导。
96.(第二支承体520)
97.图4和图5所示的第二支承体520具有支承输送机构503的另一部分(具体而言,后述的从动辊532、542、552、562、572)的功能。
98.如图4所示,第二支承体520构成检测装置500的上方侧的部分。作为一个例子,该第二支承体520形成为在上下方向上较薄且在前后方向及左右方向上扩展的扁平形状。
99.第二支承体520具有对介质p进行引导的引导板524。引导板524与介质p的上表面对置,将由输送机构503输送的介质p向输送方向下游侧引导。
100.(输送机构503)
101.图4以及图5所示的输送机构503为在检测装置500中对介质p进行输送的机构。如图4和图5所示,输送机构503包括输送辊530、540、550、560和570。输送辊530、540、550、560和570依次向着输送方向的下游侧配置。输送辊530、540、550、560和570中的每一个具有输送介质p的功能,并且如图4所示,由一对辊构成。具体地,输送辊530、540、550、560和570中的每一个包括驱动辊531、541、551、561和571以及从动辊532、542、552、562和572。
102.驱动辊531、541、551、561、571相对于从动辊532、542、552、562、572配置在下方侧,被旋转驱动而对介质p赋予输送力。
103.从动辊532、542、552、562、572相对于驱动辊531、541、551、561、571配置在上方侧,从动于驱动辊531、541、551、561、571而旋转。
104.从动辊532、542、552、562、572以能够在与驱动辊531、541、551、561、571夹着介质p的夹持位置(图4中实线所示的位置)和从介质p分离的分离位置(图4中双点划线所示的位置)之间移动的方式被第二支承体520支承。输送辊530、540、550、560和570在从动辊532、542、552、562和572位于夹持位置的状态下对介质p进行输送。
105.输送辊550是输送部的一例,具有将介质p输送到输送辊560的功能。
106.输送辊560相对于输送辊550设置在输送方向的下游侧。该输送辊560是抵接部的一例,并且是与介质p的前端抵接的抵接辊。以下,有时将输送辊560称为抵接辊560。抵接辊560具有通过与由输送辊550所输送的介质p的前端抵接来校正介质p的倾斜(即,歪斜)的功能。
107.输送辊570相对于输送辊560设置在输送方向的下游侧。该输送辊570是校正介质p在宽度方向上的位置偏移的校正辊。在下文中,输送辊570有时被称为校正辊570。校正辊570在夹着介质p的状态下基于检测部620的检测结果沿宽度方向移动,从而校正介质p在宽度方向上的位置偏移。在本实施方式中,通过抵接辊560和校正辊570这2个辊实现了调节介
质p的倾斜和位置偏移的调节部的功能,并且在通过该调节部调节了介质p的姿态等的状态下,介质p被输送到图像形成部14(具体地,转印位置ta)。
108.输送辊530和540相对于输送辊550设置在输送方向上游侧。输送辊530和540是上游侧输送部的一例,其朝向输送辊550输送介质p。
109.在本实施方式中,输送辊550以比前端传感器612的输送方向上游侧的输送速度慢且恒定的速度输送介质p。具体而言,输送辊550以比在输送辊550的输送方向上游侧输送介质p时的输送速度慢且恒定的速度输送介质p。
110.输送机构503包括输送辊530、540、550、560和570,但不限于此。例如,可以替代输送辊530、540、550、560和570而具有输送带等的输送部件。即,作为输送部的一例和上游侧输送部的一例不限于输送辊530、540和550,并且可以使用输送带等的输送部件。此外,作为抵接部的一例,不限于抵接辊560,可以是输送带等的输送部件,只要与从输送辊550的输送方向上的上游侧输送来的介质p的前端抵接即可。
111.(检测部610)
112.图4以及图5所示的检测部610为第一检测部的一例,具有对输送中的介质p的前端部以及后端部进行检测的功能。如图4和图5所示,检测部610具有前端传感器612和后端传感器614。
113.前端传感器612是前端检测部的一例,检测输送中的介质p的前端部。具体而言,前端传感器612为以与介质p非接触的方式对介质p的前端部进行检测的非接触的传感器。更具体而言,前端传感器612是使用了朝向介质p照射的光的光传感器。更具体而言,前端传感器612是通过检测向介质p照射的光的反射光来检测介质p的前端部的反射型光传感器。另外,作为前端传感器612,也可以使用透射型的光传感器。
114.后端传感器614是后端检测部的一例,检测输送中的介质p的后端部。如图5所示,前端传感器612和后端传感器614在输送方向上观察时重叠配置。具体而言,前端传感器612和后端传感器614沿输送方向(具体而言,左右方向)排列配置。此外,在输送方向上观察是指从输送方向的上游侧和下游侧中的一方朝向另一方观察的情况。另外,这里的“重叠”不需要完全重叠,只要至少一部分重叠即可。
115.在本实施方式中,如图4和图5所示,检测部610相对于抵接辊560设置于输送方向上游侧。具体地,前端传感器612相对于抵接辊560设置于输送方向上游侧且相对于输送辊550设置于输送方向下游侧。后端传感器614相对于输送辊530设置在输送方向上游侧。
116.后端传感器614是以与介质p非接触的方式检测介质p的后端部的非接触的传感器。更具体而言,后端传感器614是使用了朝向介质p照射的光的光传感器。更具体而言,如图4所示,后端传感器614由具有沿着输送方向配置的多个检测元件616(具体而言为发光元件以及受光元件)且在输送方向上被设定为较长的线传感器构成。更具体而言,作为一例,后端传感器614由接触式图像传感器(contact image sensor(cis))构成。另外,作为后端传感器614,也可以使用接触式图像传感器以外的线传感器。
117.后端传感器614的从配置于输送方向的最上游侧的检测元件616(x)到配置于输送方向的最下游侧的检测元件616(y)的区域成为检测介质p的后端部的检测区域614r。
118.在后端传感器614中,在检测区域614r中的各个检测元件616的检测与非检测的边界检测介质p的后端部的位置,将由其坐标(具体而言,从检测区域614r的输送方向下游端
起的像素数)示出的位置信息例如向控制装置160发送。
119.在检测部610中,如图4所示,配置于后端传感器614的输送方向的最上游侧的检测元件616(x)与前端传感器612之间的距离d1比最大尺寸的介质p的输送方向上的长度d2短。换言之,在前端传感器612检测到最大尺寸的介质p的前端部时,该介质p的后端部从检测区域614r向输送方向上游侧伸出。另外,检测区域614r被布置成使得在最大尺寸的介质p的前端部到达前端传感器612的输送方向的下游侧且到达抵接辊560之前,介质p的后端部位于检测区域614r的范围内。
120.在本实施方式中,如图5的符号(a)(b)所示,前端传感器612及后端传感器614配置有两组。具体而言,前端传感器612及后端传感器614配置于检测装置500中的前方侧的部分和后方侧的部分。
121.在检测部610中,如图6所示,前端传感器612和后端传感器614各自是在输送辊530和540的从动辊532和542处于分离位置的状态下,对由输送辊550输送的介质p的前端部和后端部分别进行检测的。
122.此外,作为第一检测部的一例的检测部610为上述的结构,但不限于本结构。作为第一检测部的一例,例如也可以配置一组前端传感器612和后端传感器614。另外,作为第一检测部的一例,也可以使前端传感器612和后端传感器614在宽度方向上错开配置。作为第一检测部的一例,只要能对输送中的介质p的前端部和后端部进行检测即可。
123.(前端传感器627)
124.图4以及图5所示的前端传感器627具有对由检测部610检测的介质p即输送中的介质p的前端部进行检测的功能。具体地,前端传感器627相对于校正辊570设置在输送方向上的下游侧。
125.在输送辊530、540和550以及抵接辊560的从动辊532、542、552和562位于分离位置的状态下,前端传感器627检测由校正辊570输送的介质p的前端部。
126.具体而言,前端传感器627为以与介质p非接触的方式对介质p的前端部进行检测的非接触的传感器。更具体而言,前端传感器627是使用了朝向介质p照射的光的光传感器。更具体而言,前端传感器627是通过检测照射到介质p的光的反射光来检测介质p的端部的反射型的光传感器。另外,作为前端传感器627,也可以使用透射型的光传感器。
127.(检测部620)
128.图4以及图5所示的检测部620为第二检测部的一例,具有对由检测部610检测出的介质p即输送中的介质p的宽度方向上的两端部(即,一对侧端部)进行检测的功能。如图5所示,检测部620具有一对侧端传感器628。
129.一对侧端传感器628分别检测介质p的宽度方向上的一端部和另一端部。而且,一对侧端传感器628以在宽度方向上对置的方式配置(参照图13和图14)。即,检测部620被分割为对介质p的宽度方向上的一端部进行检测的部分和对另一端部进行检测的部分,并且以在宽度方向上对置的方式配置。
130.在本实施方式中,如图5所示,一对侧端传感器628由装置前方侧的侧端传感器628(a)和装置后方侧的侧端传感器628(b)构成,对输送中的介质p的一对侧端部分别进行检测。一对侧端传感器628在从宽度方向观察时重叠配置。具体而言,一对侧端传感器628沿着宽度方向(具体而言,前后方向)排列配置。
131.在本实施方式中,检测部620相对于抵接辊560设置于输送方向下游侧。具体而言,检测部620相对于前端传感器627设置于输送方向下游侧。
132.一对侧端传感器628是以与介质p非接触的方式检测介质p的一对侧端部的非接触的传感器。更具体而言,一对侧端传感器628是使用了朝向介质p照射的光的光传感器。更具体而言,如图5所示,一对侧端传感器628由具有沿着宽度方向配置的多个检测元件629(具体而言为发光元件和受光元件)且在宽度方向上被设定为较长的线传感器构成。更具体而言,作为一例,一对侧端传感器628由接触式图像传感器(contact image sensor(cis))构成。此外,作为一对侧端传感器628,也可以使用接触式图像传感器以外的线传感器。
133.一对侧端传感器628的从配置于宽度方向的一端侧的检测元件629(x)到配置于宽度方向的另一端侧的检测元件629(y)的区域成为检测介质p的侧端部的检测区域628r。
134.在一对侧端传感器628中,在检测区域628r中的各个检测元件629的检测与非检测的边界检测介质p的侧端部的位置,将由其坐标(具体而言,从检测区域628r的前端起的像素数)表示的位置信息例如向控制装置160发送。
135.在检测单元620中,一对侧端传感器628是在输送辊530、540和550以及抵接辊560的从动辊532、542、552和562位于分离位置的状态下,检测由校正辊570输送的介质p的一对侧端部中的各个侧端部。
136.此外,作为第二检测部的一例的检测部620为上述的结构,但不限于本结构。作为第二检测部的一例,例如也可以配置多组一对侧端传感器628。另外,作为第二检测部的一例,一对侧端传感器628也可以在输送方向上错开配置。另外,检测部620相对于检测部610配置于输送方向下游侧,但也可以是相对于检测部610配置于输送方向上游侧的结构。作为第二检测部的一例,只要是对由第一检测部检测出且正在输送的介质p的与输送方向正交的正交方向的两端部进行检测的部件即可。
137.(控制装置160)
138.在此,对控制装置160的结构进行说明。控制装置160具有对包括检测装置500的各部分的图像形成装置10的各部分的动作进行控制的控制功能。而且,控制装置160具有根据检测部610、620的检测结果而对介质p的长度进行测定的测定功能。具体而言,如图7所示,控制装置160具有处理器161、存储器162、储存器163以及计时器164。
139.处理器是指广义上的处理器,作为处理器161,使用通用的处理器(例如,cpu(central processing unit:中央处理单元)以及专用的处理器(例如gpu:graphics processing unit(图形处理单元)、asic:application specific integrated circuit(专用集成电路)、fpga:field programmable gate array(现场可编程门阵列)、可编程逻辑器件等)等。
140.储存器163保存包含控制程序163a(参照图8)在内的各种程序和各种数据。具体而言,储存器163通过hdd(hard disk drive:硬盘驱动器)、ssd(solid state drive:固态硬盘)以及闪存等记录装置来实现。
141.存储器162是供处理器161执行各种程序的作业区域,在处理器161执行处理时暂时记录各种程序或各种数据。处理器161从储存器163将包含控制程序163a的各种程序读出到存储器162,将存储器162作为作业区域来执行程序。计时器164是用于计测后述的经过时间x、y等的计测部。
142.在控制装置160中,处理器161通过执行控制程序163a来实现各种功能。以下,对通过作为硬件资源的处理器161和作为软件资源的控制程序163a的协作而实现的功能结构进行说明。图8是表示处理器161的功能结构的框图。
143.如图8所示,在控制装置160中,处理器161通过执行控制程序163a作为获取部161a、测定部161b和控制部161c发挥功能。
144.控制部161c对输送机构503、检测部610、620以及前端传感器627进行使得执行以下所示的检测动作的控制。
145.如图9所示,输送机构503例如通过输送辊530、540以预定的输送速度1输送介质p,并在向比输送速度1慢的输送速度2进行减速的同时输送介质p。而且,在输送机构503中,例如输送辊550从输送辊530和540接受介质p,并且以输送速度2且恒定的速度输送介质p。在输送辊550输送介质p时,输送辊530和540中的从动辊532和542移动到分离位置。即,输送辊550单独以输送速度2且恒定的速度将介质p朝向抵接辊560输送(参见图6)。此外,恒定速度只要是大致恒定的速度即可,速度不需要完全恒定。
146.当检测部610的前端传感器612检测到由输送辊550输送的介质p的前端部时,后端传感器614在经过预定时间(以下称为经过时间x)之后检测到介质p的后端部。此时,介质p的前端相对于抵接辊560位于输送方向上游侧(参见图6)。即,在介质p的前端与抵接辊560抵接之前进行后端部的检测。此外,前端传感器612和后端传感器614各自对由输送辊550单独输送的介质p的前端部和后端部分别进行检测。
147.此外,在最大尺寸的介质p的情况下,在前端部被前端传感器612检测到的时刻,后端部相对于后端传感器614的检测区域614r位于输送方向上游侧(参照图5),在经过预定的经过时间x后,后端部位于后端传感器614的检测区域614r的区域内(参照图6)。在最小尺寸的介质p的情况下,在前端部被前端传感器612检测到的时刻和经过预定的经过时间x后这双方,后端部都位于后端传感器614的检测区域614r的区域内。
148.此外,输送辊550通过在介质p与抵接辊560抵接之时起以预定时间输送介质p从而使得在介质p的前端的从宽度方向上的一端到另一端都与抵接辊560抵接之后,停止输送。
149.然后,由抵接辊560输送介质p。当抵接辊560输送介质p时,在输送辊530、540和550中,从动辊532、542和552移动至分离位置。即,抵接辊560单独将介质p向校正辊570输送。
150.然后,由校正辊570输送介质p。在校正辊570输送介质p时,在输送辊530、540和550以及抵接辊560中,从动辊532、542、552和562移动到分离位置。即,校正辊570单独地将介质p朝向输送方向下游侧输送。
151.当检测单元620的前端传感器627检测到由校正辊570输送的介质p的前端部时,在经过预定时间(以下称为经过时间y)之后,一对侧端传感器628检测到介质p的一对侧端部。前端传感器627和一对侧端传感器628检测由校正辊570单独地输送介质p的状态下的介质p的前端部和一对侧端部。
152.校正辊570通过根据由检测单元620检测到的位置偏移量(参见后述)在宽度方向上进行移动,来校正介质p在宽度方向上的位置偏移。
153.当图像形成单元214被用作图像形成单元时,抵接辊560再次开始介质p的输送,使得形成在转印体216上的调色剂像到达转印位置ta的定时与介质p到达转印位置ta的定时同步。
154.获取部161a获取检测部610、620检测到介质p的前端部、后端部、一对侧端部的检测信息。在后端部以及一对侧端部的检测信息中包含表示介质p的后端部以及一对侧端部的位置的位置信息。位置信息具体而言,对于介质p的后端部而言是表示输送方向上的位置的位置信息,对于介质p的侧端部而言时表示介质p的宽度方向上的位置的位置信息。
155.具体而言,例如后端传感器614在检测区域614r中的各个检测元件616的检测与非检测的边界检测介质p的后端部的位置,获取部161a取得由其坐标(具体而言,从检测区域614r的输送方向下游端起的像素数)表示的位置信息。
156.另外,例如一对侧端传感器628分别在检测区域628r中的各个检测元件629的检测与非检测的边界检测介质p的侧端部的位置,由获取部161a取得由其坐标(具体而言,从检测区域628r的前端起的像素数)表示的位置信息。
157.测定部161b基于获取部161a所获取的位置信息,例如如下述那样测定介质p的输送方向长度。
158.测定部161b例如基于该位置信息,求出从后端传感器614的检测区域614r的输送方向下游端(即,配置于输送方向的最下游侧的检测元件616(y))到介质p的后端为止的距离la(参照图6)。
159.具体而言,基于后端传感器614的检测元件616的全部像素数p1(pixels/mm)和从后端传感器614的检测区域614r的输送方向下游端到介质p的后端的像素数p2(pixels),通过以下的式(1)求出距离la。
160.式(1):la=p2
÷
p1
161.从后端传感器614的检测区域614r的输送方向下游端到前端传感器612为止的距离lb(参照图6)是已知的。并且,通过将已知的输送速度2乘以已知的经过时间x,作为已知的值,预先求出从前端传感器612到介质p的前端为止的距离lc(参照图6)。然后,测定部161b通过以下的式(2)求出介质p的输送方向长度l1。
162.式(2):l1=la+lb+lc
163.在本实施方式中,如图10所示,根据两组前端传感器612(a)(b)及后端传感器614(a)(b)的检测结果,测定介质p的宽度方向的一端侧部分和另一端侧部分的输送方向长度l1。此外,在图10~图12中,示意性地示出两组前端传感器612(a)(b)及后端传感器614(a)(b)。
164.在此,在使用纸张作为介质p的情况下等,如图10所示,由于裁剪误差,有时在介质p的宽度方向上的一端侧部分和另一端侧部分,输送方向长度l1不同,能够测定该裁剪误差。另外,能够将介质p中的宽度方向上的一端侧部分和另一端侧部分处的输送方向长度l1的平均值、最小值和最大值设为介质p的输送方向长度。
165.在本实施方式中,如图11所示,能够根据两组前端传感器612(a)(b)的检测定时的偏差来检测介质p的斜行。在此,在介质p斜行的情况下,有时在计算出的输送方向长度l1与真正的输送方向长度lm之间会产生误差。
166.因此,为了校正该误差,也可以如以下的式(3)那样,根据介质p的输送速度2(v)、前端传感器612(a)(b)的通过时间差δt、前端传感器612(a)(b)间的距离wx求出斜行量,以校正为真正的纸张长度lm。
167.式(3):lm=(√((δt
÷
v)2+wx2)
÷
wx)
×
l1
168.测定部161b基于获取部161a所取得的位置信息,例如如下述那样测定介质p的宽度方向长度w1。
169.测定部161b例如基于该位置信息,求出从侧端传感器628(a)的检测区域628r的前端(即,配置于前端侧的检测元件629(y))到介质p的一个侧端(具体而言,装置前方侧的侧端)的距离wa(参照图12)。
170.具体而言,基于侧端传感器628(a)的检测元件629的全部像素数p3(pixels/mm)和从侧端传感器628(a)的检测区域628r的前端到一个侧端(具体而言,装置前方侧的侧端)的像素数p4(pixels),通过以下的式(4)求出距离wa。
171.式(4)wa=p4
÷
p3
172.另外,测定部161b例如基于该位置信息,求出从侧端传感器628(b)的检测区域628r的前端(即,配置于前端侧的检测元件629(y))到介质p的另一侧端(具体而言,装置后方侧的侧端)为止的距离wb(参照图12)。
173.具体而言,基于侧端传感器628(b)的检测元件629的全部像素数p5(pixels/mm)和从侧端传感器628(b)的检测区域628r的前端到另一侧端(具体而言,装置后方侧的侧端)的像素数p6(pixels),通过以下的式(5)求出距离wb。
174.式(5)wb=p6
÷
p5
175.从侧端传感器628(a)的检测区域614r的前端到侧端传感器628(b)的检测区域614r的前端的距离wc是已知的。然后,测定部161b通过以下的式(6)求出介质p的宽度方向长度w1。
176.式(6):w1=wc+wb-wa
177.另外,测定部161b基于获取部161a所获取到的位置信息,例如,如以下那样检测介质p在宽度方向上的位置偏移量。
178.测定部161b例如根据该位置信息,如上述那样,求出从侧端传感器628(a)的检测区域628r的前端(即,配置于前端侧的检测元件629(y))到介质p的一个侧端(具体而言,装置前方侧的侧端)的距离wa(参照图12)。
179.在此,预先求出从侧端传感器628(a)的检测区域628r的前端(即,配置于前端侧的检测元件629(y))到介质p的基准位置处的介质p的一个侧端(具体而言,装置前方侧的侧端)的距离wm(参照图12)作为已知的值。
180.介质p的基准位置是作为在输送介质p时介质p应该配置的位置而预先设定的宽度方向上的位置。
181.然后,测定部161b根据距离wm与距离wa的差,检测介质p的宽度方向上的位置偏移量wn。这样,根据作为检测部620的一个检测部的一例的侧端传感器628(a)的检测结果,检测出介质p的宽度方向上的位置偏移量。
182.此外,测定部161b也可以基于从侧端传感器628(b)的检测区域628r的前端(即,配置于前端侧的检测元件629(y))到介质p的另一侧端(具体而言,装置后方侧的侧端)的距离wb,检测介质p的宽度方向上的位置偏移量。此外,也可以根据距离wa以及距离wb而对介质p中的宽度方向上的位置偏移量进行检测。
183.此外,在本实施方式中,一对侧端传感器628也可以检测介质p的输送方向下游侧部分的一对侧端部(参照图13)和介质p的输送方向上游侧部分的一对侧端部(参照图14)。
可以根据该检测结果对介质p的输送方向下游侧部分和输送方向上游侧部分的宽度方向长度w1进行测定。
184.具体地,例如,在检测单元620的前端传感器627检测到由校正辊570输送的介质p的前端部起经过了经过时间y之后,由一对侧端传感器628检测到介质p的一对侧端部,由此,如图13所示,检测到介质p的输送方向下游侧部分的一对侧端部。
185.在图13所示的示例中,在介质p的前端部从前端传感器627起被输送了、校正辊570的输送速度乘以经过时间y而得到的距离m1的量的位置处,检测到介质p的一对侧端部。
186.此外,在从检测单元620的前端传感器627检测到由校正辊570输送的介质p的前端部起经过了比经过时间y长的经过时间z之后,由一对侧端传感器628检测到介质p的一对侧端部,由此,如图14所示,检测到介质p的输送方向上游侧部分的一对侧端部。
187.在图14所示的示例中,在介质p的前端部从前端传感器627起被输送了校正辊570的输送速度乘以经过时间z而得到的距离m2的量的位置处,检测到介质p的一对侧端部。距离m2比距离m1长。
188.在此,在作为介质p而使用了纸张的情况下,由于裁剪误差,存在在介质p的输送方向下游侧部分和输送方向上游侧部分处宽度方向长度w1不同的情况,能够对该裁剪误差进行测定。另外,能够将介质p的输送方向下游侧部分和输送方向上游侧部分处的宽度方向长度w1的平均值、最小值和最大值设为介质p的宽度方向长度。
189.并且,在本实施方式中,也可以是,根据一对侧端传感器628对介质p的输送方向下游侧部分的一对侧端部(参照图13)和介质p的输送方向上游侧部分的一对侧端部(参照图14)进行检测的检测结果,校正在因介质p斜行而计算出的宽度方向长度w1与真正的宽度方向长度之间产生的误差。
190.另外,在图12~14中,示意性地示出了前端传感器627和一对侧端传感器628。
191.(本实施方式的作用)
192.在本实施方式中,检测部620对由检测部610检测出且处于输送中的介质p的宽度方向上的两端部(即一对侧端部)进行检测。
193.因此,与对输送中的介质p的前端部和后端部进行检测,并根据输送方向上的介质p的长度而对宽度方向上的介质p的长度进行推断的情况相比,能够高精度地对输送中的介质p的一对侧端部的位置进行检测。
194.在本实施方式中,如图4和图5所示,检测部620相对于抵接辊560设置在输送方向下游侧。因此,检测部620能够检测到通过介质p与抵接辊560的抵接而使介质p的姿势被进行了调整的状态下的介质p的一对侧端部。其结果,与检测部620相对于抵接辊560设置在输送方向上游侧的情况相比,检测部620对介质p的两端部(即一对侧端部)的检测精度提高。
195.在本实施方式中,检测部620被分割为对介质p的宽度方向上的一端部进行检测的部分和对另一端部进行检测的部分,并且以在宽度方向上对置的方式配置。
196.因此,与检测部620未被分割而由从介质p的宽度方向上的一端部侧朝向另一端部侧延伸的单个检测部构成的情况相比,能够避免在介质p的宽度方向上的两端部的检测中所不需要的区域内配置检测部。
197.在本实施方式中,通过作为检测部620的一个检测部的一例的侧端传感器628(a),对介质p的宽度方向上的位置偏移量进行检测。
198.因此,与相对于检测部620而另外设置对介质p的宽度方向上的位置偏移量进行检测的检测部的情况相比,减少了部件数量。
199.在本实施方式中,如图4和图5所示,检测部610相对于抵接辊560设置在输送方向上游侧。
200.在此,在检测部610相对于抵接辊560设置在输送方向下游侧的结构(以下称为结构a)中,由于在输送方向上较长的检测部610相对于抵接辊560设置在输送方向下游侧,因此抵接辊560在检测装置500中的介质p的输送路径中配置在输送方向上的上游侧。其结果,转印位置ta与抵接辊560之间的距离会变长,存在通过抵接辊560的抵接而已经被调整了姿势的介质p再次倾斜的情况。
201.与此相对,在本实施方式中,由于检测部610相对于抵接辊560设置在输送方向上游侧,因此抵接辊560在检测装置500中的介质p的输送路径中配置在更靠输送方向下游侧的位置。其结果,转印位置ta与抵接辊560之间的距离变短,与结构a的情况相比,抑制了在由检测部610进行检测时对姿势已被抵接辊560调整过的介质p的影响。
202.此外,在本实施方式中,如图4和图5所示,检测部610相对于校正辊570设置在输送方向上游侧。
203.在检测部610相对于校正辊570设置在输送方向下游侧的结构(以下称为结构x)中,由于在输送方向上较长的检测部610相对于校正辊570设置在输送方向下游侧,因此校正辊570在检测装置500中的介质p的输送路径中配置在输送方向上的上游侧。其结果,转印位置ta与校正辊570之间的距离变长,存在由校正辊570校正了位置偏移的介质p再次发生位置偏移的情况。
204.与此相对,在本实施方式中,由于检测部610相对于校正辊570设置在输送方向上游侧,因此校正辊570在检测装置500中的介质p的输送路径中设置在更靠输送方向下游侧。其结果,转印位置ta与校正辊570之间的距离变短,与结构x的情况相比,抑制了在检测部610检测时对位置偏移被校正辊570校正过的介质p的影响。
205.在本实施方式中,如图4所示,配置于后端传感器614的输送方向的最上游侧的检测元件616(x)与前端传感器612之间的距离d1比最大尺寸的介质p的输送方向上的长度d2短。
206.因此,与后端传感器614中的配置于输送方向的最上游侧的检测元件616(x)与前端传感器612之间的距离d1比最大尺寸的介质p的输送方向长度d2长的情况相比,能够将检测装置按照输送方向长度小型化。
207.在本实施方式中,如图5的附图标记(a)、(b)所示,从输送方向观察时重叠配置的前端传感器612和后端传感器614配置有两组。
208.因此,与配置一组从输送方向观察时重叠配置的前端传感器612和后端传感器614的结构相比,介质p的前端部和后端部的检测精度高。
209.此外,在实施方式中,如图6所示,前端传感器612和后端传感器614分别检测由输送辊550进行输送的状态下的介质p的前端部和后端部,该输送辊550以比前端传感器612的输送方向上游侧处的输送速度慢且恒定的速度输送介质p。
210.在由前端传感器612和后端传感器614分别检测由一边使输送速度从前端传感器612的输送方向上游侧处的输送速度起逐渐降低一边输送介质p的输送部进行输送的状态
下的介质p的前端部和后端部的结构(以下,称为结构b)中,检测的是速度变动的介质p的前端部和后端部。因此,根据上述结构,与结构b的情况相比,介质p的前端部和后端部的检测精度较高。
211.在本实施方式中,如图6所示,前端传感器612和后端传感器614在输送辊530和540的从动辊532和542位于分离位置的状态下,分别检测介质p的前端部和后端部。
212.因此,与前端传感器612和后端传感器614中各自在输送辊530和540的从动辊532和542位于夹持位置的状态下检测介质p的前端部和后端部的构造相比,减小了作用于介质p上的负荷(即,压力)。
213.(变形例)
214.在本实施方式中,如图4和图5所示,检测部620设置在抵接辊560的输送方向下游侧,但不限于此。例如,也可以是检测部620相对于抵接辊560设置在输送方向上游侧的结构。
215.在本实施方式中,检测部620被分割为对介质p的宽度方向的一端部进行检测的部分和对另一端部进行检测的部分,并且以在宽度方向上对置的方式配置,但并不限定于此。例如,检测部620也可以不被分割,而由从介质p的宽度方向的一端部侧朝向另一端部侧延伸的单个检测部构成。
216.在本实施方式中,通过作为检测部620的一个检测部的一例的侧端传感器628(a)来检测介质p的宽度方向上的位置偏移量,但不限于此。例如,也可以采用相对于检测部620而另外设置对介质p的宽度方向上的位置偏移量进行检测的检测部的结构。
217.在本实施方式中,如图4和图5所示,检测部610设置在抵接辊560的输送方向上游侧,但不限于此。也可以采用检测部610设置在抵接辊560的输送方向下游侧的结构。
218.在本实施方式中,如图4所示,配置于后端传感器614的输送方向上的最上游侧的检测元件616(x)与前端传感器612之间的距离d1比最大尺寸的介质p的输送方向长度d2短,但不限于此。也可以采用该距离d1比最大尺寸的介质p的输送方向长度d2长的结构。
219.在本实施方式中,如图6所示,前端传感器612和后端传感器614分别检测由输送辊550进行输送的状态下的介质p的前端部和后端部,该输送辊550以比前端传感器612的输送方向上游侧处的输送速度慢且恒定的速度输送介质p,但不限于此。例如,也可以是由前端传感器612和后端传感器614分别检测被如下输送部进行输送的状态下的介质p的前端部和后端部的结构,该输送部一边使输送速度从前端传感器612的输送方向上游侧处的输送速度起逐渐降低一边输送介质p。另外,介质p即使不是恒定速度也可以,只要至少是检测部610检测介质p的前端部和后端部时以及检测过程中的介质p的减速度比检测部610检测介质p的前端部和后端部之前和之后的定时的减速度小即可。
220.在本实施方式中,如图6所示,前端传感器612和后端传感器614中在输送辊530和540的从动辊532和542位于分离位置的状态下分别检测介质p的前端部和后端部,但不限于此。例如,前端传感器612和后端传感器614可以被配置为在输送辊530和540的从动辊532和542位于夹持位置的状态下分别检测介质p的前端部和后端部。
221.本发明不限于上述实施方式,能够在不脱离其主旨的范围内进行各种变形、变更、改良。例如,可以适当地将多个上述的变形例适当组合而构成。
222.在上述的各实施方式中,处理器是指广义的处理器,包括通用的处理器(例如cpu:
central processing unit:中央处理单元等)、专用的处理器(例如gpu:graphics processing unit(图形处理单元)、asic:application specific integrated circuit(专用集成电路)、fpga:field programmable gatearray(现场可编程门阵列)、可编程逻辑器件等)。
223.另外,上述的各实施方式中的处理器的动作可以不仅由1个处理器进行,而由存在于物理上分离的位置的多个处理器协作进行。另外,处理器的各动作的顺序并不仅限定于在上述各实施方式中记载的顺序,可以适当变更。
224.另外,在上述实施方式中使用的程序能够以存储于磁记录介质(磁带、磁盘(hdd(hard disk drive:硬盘驱动器)、fdd(flexible disk drive:软盘驱动器))等)、光记录介质(光盘(cd(compact disc)、dvd(digital versatile disk:数字通用光盘))等)、光磁记录介质、半导体存储器等计算机可读取的记录介质的状态提供。另外,这样的程序也可以预先存储在云服务器等外部服务器中,经由因特网等通信线路下载。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1