一种可智能识别自动输送物料机器人
1.本发明涉及自动化技术领域,具体是涉及一种可智能识别自动输送物料机器人。
背景技术:
2.自动化是指机器设备、系统或过程(生产、管理过程)在没有人或较少人的直接参与下,按照人的要求,经过自动检测、信息处理、分析判断和操纵控制,实现预期的目标的过程。自动化技术广泛用于工业、农业、军事、科学研究、交通运输、商业、医疗、服务和家庭等方面。自动化技术可以把人从繁重的体力劳动、部分脑力劳动以及恶劣、危险的工作环境中解放出来,极大地提高劳动生产率,增强人类认识世界和改造世界的能力。因此,自动化是工业、农业、国防和科学技术现代化的重要条件和显著标志。
3.在自动化生产过程中,物料搬运机器人得到了广泛的应用,目前的物料搬运机器人虽然可以对物料进行搬运操作,但是物料搬运机器人一次搬运物料的数量较少,由上可见,现有的物料搬运机器人存在一次搬运物料的数量较少的缺点,难以得到推广应用。
4.因此,需要提供一种可智能识别自动输送物料机器人,旨在解决上述问题。
技术实现要素:
5.针对现有技术存在的不足,本发明实施例的目的在于提供一种可智能识别自动输送物料机器人,以解决上述背景技术中的问题。
6.为实现上述目的,本发明提供如下技术方案:一种可智能识别自动输送物料机器人,包括移动箱,所述移动箱上设有抓取机构,所述移动箱底部安装有电控移动轮,所述移动箱内部设有蓄电池和信息处理模块,所述蓄电池和信息处理模块与用电设备电性连接,所述移动箱的一侧设置有扫码机,所述移动箱的另一侧设有转运组件,所述转运组件包括转运箱,所述转运箱靠近移动箱的一侧设置有定位组件,所述定位组件和移动箱之间设置有连接组件,所述定位组件包括设置于转运箱一侧的第一安装槽,所述第一安装槽内设有导杆,所述导杆上滑动设有导向块,所述导向块上设有连板,所述连接组件包括设置于移动箱一侧的第二安装槽,所述第二安装槽上设有支撑齿条,所述支撑齿条外活动设有升降板,所述升降板内设有滑槽,所述升降板上设有与滑槽滑动配合的滑板,所述滑板与升降板之间连接有第四电动伸缩件,所述滑板上安装有连接电机,所述连接电机连接有与支撑齿条相啮合的连接齿轮,所述升降板内设有传动槽,所述传动槽内活动设有与连接齿轮相啮合的连接齿条,所述连接齿条的一端贯穿升降板并与连接块相连接,所述连接块与设置于连板上的连接孔相适配,第四电动伸缩件收缩并通过滑板带动连接电机靠近连接齿条,当连接齿轮与连接齿条相啮合时,连接电机驱动连接齿轮顺时针旋转,连接齿轮通过齿轮齿条啮合的方式带动连接齿条向外侧移动,当连接块移动至连接孔的正上方时,第四电动伸缩件伸长并通过滑板带动连接电机靠近支撑齿条,当连接齿轮与支撑齿条相啮合时,连接电机驱动连接齿轮逆时针旋转,连接齿轮通过齿轮齿条啮合连接的方式带动升降板相对支撑齿条下移,升降板带动连接齿条下移的方式带动
连接块与连接孔相配合,从而连接移动箱和转运箱。
7.作为本发明进一步的方案,所述定位组件还包括:复位弹簧,所述复位弹簧连接于第一安装槽和导向块之间;侧板,所述侧板安装于转运箱靠近移动箱的一侧,所述侧板内设有通孔;啮合齿轮,所述啮合齿轮转动设置于通孔内;第一齿条,所述第一齿条的一端与连板相连接,所述第一齿条的另一端与啮合齿轮啮合连接;第二齿条,所述第二齿条与啮合齿轮远离第一齿条的一侧相啮合,所述第二齿条远离连板的一端连接有固定座。
8.作为本发明进一步的方案,所述转运组件还包括:支撑板,所述支撑板滑动设置于转运箱内部;支撑弹簧,所述支撑弹簧连接于转运箱和支撑板之间;移动轮,所述移动轮设有若干个并分布于转运箱底部。
9.作为本发明进一步的方案,所述抓取机构包括:旋转组件,所述旋转组件设置于移动箱内;升降组件,所述升降组件设置于移动箱上部并与旋转组件相连接;调节组件,所述调节组件的一端与升降组件相连接,所述调节组件的另一端设有夹紧单元。
10.作为本发明进一步的方案,所述旋转组件包括:旋转电机,所述旋转电机安装于移动箱内部;主动齿轮,所述主动齿轮与旋转电机的输出端相连接;从动齿轮,所述从动齿轮活动设置于移动箱内部并与主动齿轮啮合连接;旋转柱,所述旋转柱活动设置于移动箱内部并与从动齿轮相连接。
11.作为本发明进一步的方案,所述升降组件包括:立柱,所述立柱设置于移动箱上,所述立柱的一端通过移动箱并与旋转柱固定连接,所述立柱上设有挡环;升降筒,所述升降筒活动套设于立柱外侧,所述升降筒内侧设置有齿条部;升降电机,所述升降电机安装于立柱上,所述升降电机的输出端连接有与齿条部相啮合的升降齿轮。
12.作为本发明进一步的方案,所述调节组件包括:横板,所述横板垂直安装于升降筒远离移动箱的一端;安装板,所述安装板的一端贯穿横板并与设置于横板内部的第一电动伸缩件相连接,所述安装板的另一端活动设有立板;调节齿轮,所述调节齿轮活动设置于立板上,所述调节齿轮的一端连接有连杆;第二电动伸缩件,所述第二电动伸缩件的一端与安装板相连接,所述第二电动伸缩件的另一端连接有与调节齿轮相啮合的调节齿条。
13.作为本发明进一步的方案,所述夹紧单元包括:夹板,所述夹板对称活动设置于连杆远离调节齿轮的一端;第三电动伸缩件,所述第三电动伸缩件连接于连杆和夹板之间。
14.综上所述,本发明实施例与现有技术相比具有以下有益效果:本发明通过扫码机和抓取机构之间的配合,可以将物料进行准确识别并放置在转运箱中,便于一次转运多个物料,第四电动伸缩件收缩并通过滑板带动连接电机靠近连接齿条,当连接齿轮与连接齿条相啮合时,连接电机驱动连接齿轮顺时针旋转,连接齿轮通过齿轮齿条啮合的方式带动连接齿条向外侧移动,当连接块移动至连接孔的正上方时,第四电动伸缩件伸长并通过滑板带动连接电机靠近支撑齿条,当连接齿轮与支撑齿条相啮合时,连接电机驱动连接齿轮逆时针旋转,连接齿轮通过齿轮齿条啮合连接的方式带动升降板相对支撑齿条下移,升降板带动连接齿条下移,连接齿条通过带动连接块与连接孔相配合的方式连接移动箱和转运箱,移动箱通过与多个转运箱相连接的方式增加一次转运物料的数量,具备灵活抓取、稳定连接、自动定位、高效送料和工作效率高的效果。
15.为更清楚地阐述本发明的结构特征和功效,下面结合附图与具体实施例来对本发明进行详细说明。
附图说明
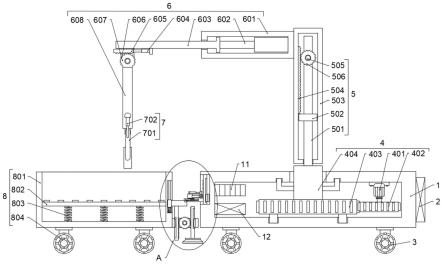
16.图1为发明实施例的结构示意图。
17.图2为发明实施例中a的局部放大图。
18.图3为发明实施例中b的局部放大图。
19.图4为发明实施例中连板的结构示意图。
20.图5为发明实施例中旋转柱的结构示意图。
21.附图标记:1-移动箱、2-扫码机、3-电控移动轮、4-旋转组件、401-旋转电机、402-主动齿轮、403-从动齿轮、404-旋转柱、5-升降组件、501-立柱、502-挡环、503-升降筒、504-齿条部、505-升降电机、506-旋转齿轮、6-调节组件、601-横板、602-第一电动伸缩件、603-安装板、604-第二电动伸缩件、605-调节齿条、606-立板、607-调节齿轮、608-连杆、7-夹紧单元、701-夹板、702-第三电动伸缩件、8-转运组件、801-转运箱、802-支撑板、803-支撑弹簧、804-移动轮、9-定位组件、901-第一安装槽、902-导杆、903-导向块、904-连板、905-复位弹簧、906-第一齿条、907-侧板、908-啮合齿轮、909-第二齿条、910-固定座、10-连接组件、1001-第二安装槽、1002-支撑齿条、1003-升降板、1004-滑板、1005-连接电机、1006-连接齿轮、1007-第四电动伸缩件、1008-滑槽、1009-传动槽、1010-连接齿条、1011-连接孔、1012-横杆、1013-连接块、11-蓄电池、12-信息处理模块。
具体实施方式
22.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
23.以下结合具体实施例对本发明的具体实现进行详细描述。
24.在本发明的一个实施例中,参见图1、图2、图3和图4,所述一种可智能识别自动输送物料机器人,包括移动箱1,所述移动箱1上设有抓取机构,所述移动箱1底部安装有电控移动轮3,所述移动箱1的一侧设置有扫码机2,所述移动箱1的另一侧设有转运组件8,所述转运组件8包括转运箱801,所述转运箱801靠近移动箱1的一侧设置有定位组件9,所述定位
组件9和移动箱1之间设置有连接组件10,所述定位组件9包括设置于转运箱801一侧的第一安装槽901,所述第一安装槽901内设有导杆902,所述导杆902上滑动设有导向块903,所述导向块903上设有连板904,所述连接组件10包括设置于移动箱1一侧的第二安装槽1001,所述第二安装槽1001上设有支撑齿条1002,所述支撑齿条1002外活动设有升降板1003,所述升降板1003内设有滑槽1008,所述升降板1003上设有与滑槽1008滑动配合的滑板1004,所述滑板1004与升降板1003之间连接有第四电动伸缩件1007,所述滑板1004上安装有连接电机1005,所述连接电机1005连接有与支撑齿条1002相啮合的连接齿轮1006,所述升降板1003内设有传动槽1009,所述传动槽1009内活动设有与连接齿轮1006相啮合的连接齿条1010,所述连接齿条1010的一端贯穿升降板1003并与连接块1013相连接,所述连接块1013与设置于连板904上的连接孔1011相适配。
25.在本实施例中,一个移动箱1可以配备多个转运箱801,当需要对移动箱1和转运箱801进行连接时,第四电动伸缩件1007收缩并通过滑板1004带动连接电机1005靠近连接齿条1010,当连接齿轮1006与连接齿条1010相啮合时,连接电机1005驱动连接齿轮1006顺时针旋转,连接齿轮1006通过齿轮齿条啮合的方式带动连接齿条1010向外侧移动,当连接块1013移动至连接孔1011的正上方时,第四电动伸缩件1007伸长并通过滑板1004带动连接电机1005靠近支撑齿条1002,当连接齿轮1006与支撑齿条1002相啮合时,连接电机1005驱动连接齿轮1006逆时针旋转,连接齿轮1006通过齿轮齿条啮合连接的方式带动升降板1003相对于支撑齿条1002下移,升降板1003通过带动连接齿条1010下移的方式带动连接块1013与连接孔1011相配合,从而实现移动箱1和转运箱801之间的连接,当需要断开移动箱1和转运箱801时,只需要反向操作连接组件10即可,简便快捷,其中,所述移动箱1内部设有蓄电池11和信息处理模块12,所述蓄电池11和信息处理模块12与用电设备电性连接,通过扫码机2,可以对物料上的二维码进行扫码和检测,并通过抓取机构准确抓取待输送的物料,并将抓取后的物料放置于转运箱801中,可以实现一次对多个物料进行转运和输送,提高物料输送的效率,当移动箱1带动转运箱801移动至目标区域时,移动箱1和转运箱801之间的连接断开,转运箱801通过定位组件9固定在目标区域并且等待卸货,移动箱1移动至原始位置并通过连接组件10与另一个转运箱801相连接,从而继续对物料进行转运和输送,避免了在卸货期间,物料导致的移动箱不能继续转运的弊端,其中,第四电动伸缩件1007可以为电动伸缩杆,所述传动槽1009内设有横杆1012,所述横杆1012与连接齿条1010滑动连接。
26.在本发明的一个实施例中,参见图1和图2,所述定位组件9还包括复位弹簧905,所述复位弹簧905连接于第一安装槽901和导向块903之间;侧板907,所述侧板907安装于转运箱801靠近移动箱1的一侧,所述侧板907内设有通孔;啮合齿轮908,所述啮合齿轮908转动设置于通孔内;第一齿条906,所述第一齿条906的一端与连板904相连接,所述第一齿条906的另一端与啮合齿轮908啮合连接;第二齿条909,所述第二齿条909与啮合齿轮908远离第一齿条907的一侧相啮合,所述第二齿条909远离连板904的一端连接有固定座910。
27.在本实施例中,当移动箱1和转运箱801连接时,复位弹簧905处于压缩状态,当移动箱1和转动箱801之间的连接断开时,复位弹簧905伸长并推动导向块903上移,导向块903通过带动连板904上移的方式带动第一齿条906上移,第一齿条906通过齿轮齿条啮合的方式带动第二齿条909下移,第二齿条909带动固定座910下移,固定座910通过与地面接触的方式对转运箱801的位置进行固定,避免了转运箱801在卸料期间移动,其中,第一齿条906
和第二齿条909远离啮合齿轮908的一侧均设有限位槽,所述第一齿条906和第二齿条909通过限位槽与侧板907滑动连接,可以提高第一齿条906和第二齿条909升降的稳定性。
28.在本发明的一个实施例中,参见图1,所述转运组件8还包括支撑板802,所述支撑板802滑动设置于转运箱801内部;支撑弹簧803,所述支撑弹簧803连接于转运箱801和支撑板802之间;移动轮804,所述移动轮804设有若干个并分布于转运箱801底部。
29.在本实施例中,通过移动轮804,便于转运箱801的移动,通过支撑板802和支撑弹簧803,可以对转运箱801上放置的物料进行缓冲,防止物料在转运过程中发生剐蹭和碰撞。
30.在本发明的一个实施例中,参见图1,所述抓取机构包括旋转组件4,所述旋转组件4设置于移动箱1内;升降组件5,所述升降组件5设置于移动箱1上部并与旋转组件4相连接;调节组件6,所述调节组件6的一端与升降组件5相连接,所述调节组件6的另一端设有夹紧单元7。
31.在本实施例中,通过夹紧单元7,可以对物料进行夹紧,通过调节组件6,可以对夹紧单元7的位置进行灵活调节,便于对物料进行夹紧和移动,通过升降组件5,可以对物料的高度进行调节,同时也便于对不同高度的物料进行夹紧和抓取,通过旋转组件4,带动夹紧单元7进行转动,可以满足不同角度的物料的夹紧和抓取,提高装置的实用性。
32.在本发明的一个实施例中,参见图1和图4,所述旋转组件4包括旋转电机401,所述旋转电机401安装于移动箱1内部;主动齿轮402,所述主动齿轮402与旋转电机401的输出端相连接;从动齿轮403,所述从动齿轮403活动设置于移动箱1内部并与主动齿轮402啮合连接;旋转柱404,所述旋转柱404活动设置于移动箱1内部并与从动齿轮403相连接。
33.在本实施例中,旋转电机401驱动主动齿轮402旋转,主动齿轮402通过齿轮啮合的方式带动从动齿轮403旋转,从动齿轮403通过带动旋转柱404旋转的方式带动升降组件5旋转,从而带动夹紧组件7旋转。
34.在本发明的一个实施例中,参加图1,所述升降组件5包括立柱501,所述立柱501设置于移动箱1上,所述立柱501的一端穿过移动箱1并与旋转柱404固定连接,所述立柱501上设有挡环502;升降筒503,所述升降筒503活动套设于立柱501外侧,所述升降筒503内侧设置有齿条部504;升降电机505,所述升降电机505安装于立柱501上,所述升降电机505的输出端连接有与齿条部504相啮合的升降齿轮506。
35.在本实施例中,升降电机505驱动升降齿轮506顺时针旋转,升降齿轮506通过与齿条部504啮合连接的方式带动升降筒503上移,升降筒503通过调节组件6带动夹紧单元7上移,满足不同高度的物料的夹紧和抓取,通过挡环502,可以对升降筒503上移的高度进行限位。
36.在本发明的一个实施例中,参见图1,所述调节组件6包括横板601,所述横板601垂直安装于升降筒503远离移动箱1的一端;安装板603,所述安装板603的一端贯穿横板601并与设置于横板601内部的第一电动伸缩件602相连接,所述安装板603的另一端活动设有立板606;调节齿轮607,所述调节齿轮607活动设置于立板606上,所述调节齿轮607的一端连接有连杆608;第二电动伸缩件604,所述第二电动伸缩件604的一端与安装板603相连接,所述第二电动伸缩件604的另一端连接有与调节齿轮607相啮合的调节齿条605。
37.在本实施例中,第一电动伸缩件602伸长,可以带动安装板603远离横板601,从而带动夹紧单元7向外侧移动,便于对远处的物料进行抓取,第二电动伸缩件604伸长并带动
调节齿条605远离横板6010,调节齿条605通过齿轮齿条啮合的方式带动连杆608逆时针旋转,连杆608带动夹紧单元7逆时针旋转,便于夹紧单元7将抓取后的物料放置于转运箱801内,其中,第一电动伸缩件602和第二电动伸缩件604可以为电动伸缩杆。
38.在本发明的一个实施例中,参见图1,所述夹紧单元7包括夹板701,所述夹板701对称并且活动设置于连杆608远离调节齿轮607的一端;第三电动伸缩件702,所述第三电动伸缩件702连接于连杆608和夹板701之间。
39.在本实施例中,将对称设置的夹板701移动至待输送物料的两侧,第三电动伸缩件702伸长,对称设置的夹板701之间的夹角变小,从而对物料进行夹紧和抓取,便于对物料的位置进行灵活移动,其中,第三电动伸缩件702可以为电动伸缩杆。
40.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1