一种板材装卸机器人上下料系统的制作方法
1.本发明涉及机器人下料系统技术领域,具体涉及一种板材装卸机器人上下料系统。
背景技术:
2.随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透。结合这些领域的应用特点,人们发展了各式各样的具有感知、决策、行动和交互能力的特种机器人和各种智能机器人。
3.工业机器人在工业生产过程中,尤其是装配过程中,将不同的配件组合固定在一个工件上,而对于装配好的工件需要检测各配件之间的固定稳定性,并将不合格产品剔除,而现有技术中,会出现检测的不合格产品因为操作失误将不合格品混入合格品种。因此,研发一种悬臂式上下料机器人是很有必要的。
技术实现要素:
4.本发明的目的是提供一种板材装卸机器人上下料系统,以解决上述问题。
5.为了解决上述技术问题,本发明提供了一种板材装卸机器人上下料系统,包括:多工位转盘、贴标部、压实加固部、下料输送部、上料输送部和检测搬运部,所述多工位转盘可转动的设置在工作台上,所述多工位转盘周向等间距设置有若干放置工位;所述上料输送部固定在所述多工位转盘一侧,所述上料输送部适于输送工件并搬运至多工位转盘上;所述贴标部固定在所述多工位转盘一侧,所述贴标部适于对工件上表面贴标;所述压实加固部固定在所述工作台上,且所述压实加固部设置在所述多工位转盘上方;所述下料输送部设置在所述上料输送部的一侧,所述下料输送部适于将多工位转盘上的工件搬运并下料;所述检测搬运部设置在所述下料输送部的下料端,所述检测搬运部适于检测工件并搬运下料;其中工作时,工件依次放置在所述上料输送部上,上料输送部驱动工件水平移动并依次将工件搬运至对应放置工位上;工件移动至贴标部时,所述贴标部能够将标贴贴合在工件上端;工件移动至压实加固部时,所述压实加固部能够将标贴压实在工件上端;工件移动至下料输送部时,所述下料输送部夹取工件并输送下料;工件移动至下料输送部下料端时,所述检测搬运部检测工件是否合格并吸附工件外壁的灰尘。
6.进一步地,所述上料输送部包括:上料输送带、上料支架、上料气缸、上料夹取气缸和上料机械夹手,所述上料输送带固定在所述工作台上,且所述上料输送带的下料端靠近
所述多工位转盘;所述上料支架设置在所述上料输送带上方,所述上料气缸固定在所述上料支架上端,所述上料夹取气缸垂直固定在所述上料气缸的活动端,所述上料机械夹手固定在所述上料夹取气缸的活动端,且所述上料机械夹手朝向上料输送带;其中工作时,所述上料气缸适于驱动所述上料夹取气缸位于工件上方;所述上料夹取气缸适于驱动所述上料机械夹手夹持工件并搬运至放置工位。
7.进一步地,所述多工位转盘沿周向等间距设置有若干定位夹具,所述定位夹具适于固定工件;所述多工位转盘下设置有一调速驱动电机,所述调速驱动电机适于驱动所述多工位转盘周向转动。
8.进一步地,所述贴标部包括:贴标立板、上支撑板、下支撑板、放卷辊、取标平台、取标组件和收卷组件,所述贴标立板垂直固定在所述工作台上,所述上支撑板和所述下支撑板分别垂直固定在所述贴标立板的两端,且所述上支撑板设置在工作台上方,所述下支撑板设置在工作台下方;所述放卷辊可转动的设置在所述贴标立板侧壁;所述取标组件可滑动的设置在所述上支撑板上;所述取标平台垂直固定在所述贴标立板侧壁,且所述取标平台设置在所述取标组件下方;所述收卷组件可转动的设置在所述下支撑板上;其中工作时,标贴带放置在放卷辊上,标贴带经取标平台后向收卷组件延伸并缠绕在收卷组件上;所述取标组件水平移动以将取标平台上的标贴吸附并贴附在工件上表面。
9.进一步地,所述取标组件包括:滑动气缸、升降气缸和真空吸盘,所述滑动气缸固定在所述上支撑板上;所述升降气缸垂直固定在所述滑动气缸的活动端,所述真空吸盘固定在所述升降气缸的活动端,所述真空吸盘通孔气管与真空气泵连通,且所述真空吸盘朝向所述取标平台;其中滑动气缸驱动所述真空吸盘移动至取标平台后,所述升降气缸驱动所述真空吸盘向下移动以吸附标贴。
10.进一步地,所述收卷组件包括:收卷电机、收卷辊、张力气缸和张力辊,所述收卷电机固定在所述下支撑板上,所述收卷辊固定在所述收卷电机的转轴端部;所述张力气缸固定在所述下支撑板上,所述张力辊固定在所述张力气缸的活动端,且所述张力辊与所述收卷辊互相平行;其中标贴带缠绕在所述收卷辊外壁,所述收卷电机驱动所述收卷辊周向转动以收卷标贴带;所述张力气缸驱动所述张力辊靠近或远离所述收卷辊,以调节收卷辊收卷时标贴带的张力。
11.进一步地,所述压实加固部:压实支架、压实气缸、压实块和定位传感器,所述压实支架固定在所述多工位转盘一侧,所述压实气缸固定在所述压实支架的上端,且所述压实
气缸设置在所述多工位转盘上方;所述压实块固定在所述压实气缸的活动端,所述定位传感器固定在所述压实支架侧壁;其中多工位转盘驱动工件移动至压实块下方时,所述压实气缸驱动所述压实块向下移动以将工件上表面标贴压实。
12.进一步地,所述下料输送部包括:下料输送带、两档条和下料搬运组件,所述下料输送带固定在所述工作台上,所述下料输送带一端靠近所述多工位转盘;两档条分别固定在所述下料输送带的两侧,两档条的间距不小于工件的宽度;所述下料搬运组件设置在所述下料输送带上方,所述下料搬运组件适于夹取工件;其中工作时,下料搬运组件将定位夹具上的工件夹取并搬运至下料输送带。
13.进一步地,所述下料搬运组件包括:下料支架、下料气缸、下料夹取气缸和下料机械夹手,所述下料支架固定在所述下料输送带上方,所述下料气缸水平固定在所述下料支架上端,所述下料夹取气缸竖直固定在所述下料气缸的活动端,所述下料机械夹手固定在所述下料夹取气缸的活动端;其中下料气缸驱动所述下料机械夹手至工件上方后,所述下料夹取气缸驱动所述下料机械夹手向下移动以夹取工件。
14.进一步地,所述检测搬运部包括:检测头、检测气缸、竖直气缸、负压吸盘、顶推板、固定块、两滑动板和下料斜坡,所述检测头设置在所述下料输送带的下料端上端,所述检测头适于检测工件外壁光滑度是否合格;所述下料斜坡固定在所述下料输送带的一侧,且所述下料斜坡与所述下料输送带互相垂直;所述检测气缸水平固定在所述工作台上,且所述检测气缸沿所述下料斜坡长度方向设置;所述竖直气缸固定在所述检测气缸的活动端;所述固定块固定在所述竖直气缸的活动端,且所述固定块设置在所述下料斜坡的上方;所述固定块呈
ꢀ“
︹”型,所述负压吸盘固定在所述固定块上,且所述负压吸盘朝下设置;所述顶推板垂直固定在所述固定块侧壁,且所述顶推板朝向所述负压吸盘;两滑动板可滑动的设置在所述固定块的下端,其中一个滑动板侧壁开设有一与所述顶推板相适配的通槽;每所述滑动板下端开设有一限位槽;其中下料输送带驱动工件移动至检测头下方时,所述检测头适于检测工件是否合格;检测合格时,所述检测气缸驱动所述固定块向下料输送带移动,至所述负压吸盘与工件相抵,固定块继续向下移动以使两滑动板能够负压吸附工件外壁的灰尘;检测不合格时,检测气缸驱动固定块向下料输送带移动,至所述负压吸盘与工件相抵,此时两滑动板下端的限位槽与下料输送带下料端的凸起块互相插接,检测气缸继续驱动所述固定块水平移动,以使所述顶推板凸出所述滑动板侧壁并撑开工件侧壁凹槽。
15.本发明的有益效果是,本发明提供了一种板材装卸机器人上下料系统,通过贴标部的设置,能够对工件表面粘贴标贴。通过检测搬运部的设置,能够将下料输送带上的工件吸附,并检测工件是否合格。对于合格的工件检测搬运部能够直接将工件吸气除尘后进行下料。对于不合格的工件,检测搬运部能够对工件侧壁挤压出凹槽以标识工件。
附图说明
16.下面结合附图和实施例对本发明进一步说明。
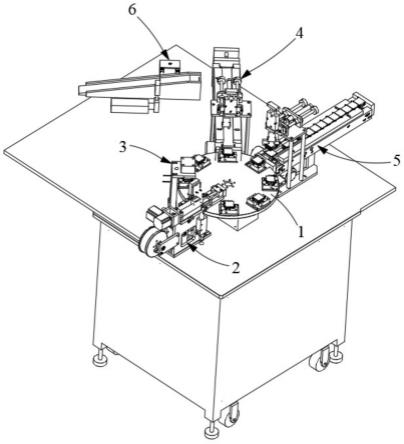
17.图1是本发明的一种板材装卸机器人上下料系统的优选实施例的立体图;图2是本发明的上料输送部的立体图;图3是本发明的多工位转盘的立体图;图4是本发明的贴标部的立体图;图5是本发明的压实加固部的立体图;图6是本发明的下料输送部和检测搬运部的立体图;图7是本发明的固定块的立体图。
18.图中:1、多工位转盘;11、定位夹具;12、调速驱动电机;2、贴标部;21、贴标立板;22、上支撑板;23、下支撑板;24、放卷辊;25、取标平台;26、取标组件;261、滑动气缸;262、升降气缸;263、真空吸盘;27、收卷组件,271、收卷电机;272、收卷辊;273、张力气缸;274、张力辊;3、压实加固部;31、压实支架;32、压实气缸;33、压实块;34、定位传感器;4、下料输送部;41、下料输送带;411、凸起块;42、档条;43、下料支架;44、下料气缸;45、下料夹取气缸;46、下料机械夹手;5、上料输送部;51、上料输送带;52、上料支架;53、上料气缸;54、上料夹取气缸;55、上料机械夹手;6、检测搬运部;61、检测头;62、检测气缸;63、竖直气缸;64、负压吸盘;641、顶推弹簧;65、顶推板;66、固定块;67、滑动板;671、复位弹簧;672、吸气孔;68、下料斜坡;681、限位块。
具体实施方式
19.现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
20.如图1至7所示,本发明的一种板材装卸机器人上下料系统,包括:多工位转盘1、贴标部2、压实加固部3、下料输送部4、上料输送部5和检测搬运部6。多工位转盘1上适于放置若干工件。上料输送部5适于将工件搬运至多工位转盘1上。贴标部2适于将对工件上表面贴标。压实加固部3适于将将标贴压实在工件上端。下料输送部4适于将多工位转盘1上的工件搬运并下料。检测搬运部6适于检测工件并搬运下料。针对于上述部件,下面进行一一详述。
21.多工位转盘多工位转盘1可转动的设置在工作台上,多工位转盘1周向等间距设置有若干放置工位,一个放置工位对应一个工件。多工位转盘1周向转动能够带动工件依次经过贴标部2、
压实加固部3和下料输送部4,以依次对工件进行贴标、标贴压实和下料。
22.为了实现上述效果,所述多工位转盘1沿周向等间距设置有若干定位夹具11,定位夹具11形成的适于夹紧并固定工件的位置即为放置工位。所述多工位转盘1下设置有一调速驱动电机12,所述调速驱动电机12适于驱动所述多工位转盘1周向转动。
23.上料输送部上料输送部5固定在多工位转盘1一侧,上料输送部5适于输送工件水平移动,并且上料输送部5能够将工件搬运至多工位转盘1上对应的放置工位内。
24.下面具体说明上料输送部5的结构,所述上料输送部5包括:上料输送带51、上料支架52、上料气缸53、上料夹取气缸54和上料机械夹手55。上料输送带51固定在工作台上,上料输送带51沿多工位转盘1径向延伸,且所述上料输送带51的下料端靠近所述多工位转盘1。上料支架52固定在工作台上,且上料支架52设置在所述上料输送带51上方,上料支架52上适于支撑上料气缸53。所述上料气缸53固定在所述上料支架52上端,上料气缸53的活动端水平朝向多工位转盘1。所述上料夹取气缸54垂直固定在所述上料气缸53的活动端,上料夹取气缸54的活动端竖直朝下设置,所述上料机械夹手55固定在所述上料夹取气缸54的活动端,且所述上料机械夹手55朝向上料输送带51。工件随上料输送带51移动至靠近多工位转盘1一端时,上料气缸53驱动上料夹取气缸54移动至工件上方,上料夹取气缸54驱动上料机械夹手55夹取工件,上料气缸53驱动上料机械夹手55将工件搬运至对应的放置工位上。
25.贴标部贴标部2固定在所述多工位转盘1一侧,贴标部2能够将标贴贴合在工件上端。
26.下面具体说明贴标部2的结构,所述贴标部2包括:贴标立板21、上支撑板22、下支撑板23、放卷辊24、取标平台25、取标组件26和收卷组件27。所述贴标立板21垂直固定在所述工作台上,贴标立板21适于承载上支撑板22、下支撑板23、放卷辊24和取标平台25。所述上支撑板22和所述下支撑板23分别垂直固定在所述贴标立板21的两端,且所述上支撑板22设置在工作台上方,所述下支撑板23设置在工作台下方,上支撑板22上适于承载取标组件26,下支撑板23上适于承载收卷组件27。放卷辊24可转动的设置在贴标立板21侧壁,放卷辊24上设置有标贴带。所述取标平台25垂直固定在所述贴标立板21侧壁,且所述取标平台25设置在所述取标组件26下方,取标平台25水平设置。标贴带的自由端经取标平台25上方,并在取标平台25的末端向外弯折、延伸,最终缠绕在收卷组件27上。取标组件26可滑动的设置在上支撑板22上,取标组件26能够将移动至取标平台25上方对应的标贴吸附,并粘贴在工件上表面。
27.为了实现上述取标组件26吸附标贴并粘贴在工件上表面的效果,所述取标组件26包括:滑动气缸261、升降气缸262和真空吸盘263。所述滑动气缸261固定在所述上支撑板22上,滑动气缸261的活动端水平朝向多工位转盘1。所述升降气缸262垂直固定在所述滑动气缸261的活动端,升降气缸262的活动端竖直朝下设置,所述真空吸盘263固定在所述升降气缸262的活动端,所述真空吸盘263通孔气管与真空气泵连通,且所述真空吸盘263朝向所述取标平台25。通过上述设置,使得滑动气缸261驱动所述真空吸盘263移动至取标平台25后,所述升降气缸262驱动所述真空吸盘263向下移动以吸附标贴,吸附完成后,滑动旗杆个驱动真空吸盘263带动标贴移动至放置工位上方,并通过升降气缸262驱动真空吸盘263将标贴粘贴到工件的上表面。
28.为了实现将标贴带回收的效果,所述收卷组件27包括:收卷电机271、收卷辊272、张力气缸273和张力辊274。所述收卷电机271固定在所述下支撑板23上,所述收卷辊272固定在所述收卷电机271的转轴端部,收卷电机271启动时,能够驱动收卷辊272同步周向转动,而由于标贴带的自由端缠绕在收卷辊272上,收卷辊272转动时,能够拉动标贴带,标贴带在张力作用下向收卷辊272上收卷。所述张力气缸273固定在所述下支撑板23上,所述张力辊274固定在所述张力气缸273的活动端,且所述张力辊274与所述收卷辊272互相平行。所述张力气缸273驱动所述张力辊274靠近或远离所述收卷辊272,以调节收卷辊272收卷时标贴带的张力,以确保收卷电机271启动时,能够带动收卷辊272连续收卷标贴带。
29.压实加固部压实加固部3固定在所述工作台上,且所述压实加固部3设置在所述多工位转盘1上方。工件随多工位转盘1移动至压实加固部3下方时,所述压实加固部3能够将标贴压实在工件上端。
30.下面具体说明压实加固部3的结构,所述压实加固部3:压实支架31、压实气缸32、压实块33和定位传感器34。所述压实支架31固定在所述多工位转盘1一侧,压实支架31适于承载压实气缸32和定位传感器34。所述压实气缸32固定在所述压实支架31的上端,且所述压实气缸32设置在所述多工位转盘1上方,压实气缸32的活动端竖直朝下设置。所述压实块33固定在所述压实气缸32的活动端,压实气缸32能够驱动压实块33与工件上表面相抵,从而将标贴压实在工件上。所述定位传感器34固定在所述压实支架31侧壁,定位传感器34能够检测压实块33下方是否有工件。通过上述设置,使得多工位转盘1驱动工件移动至压实块33下方时,所述压实气缸32驱动所述压实块33向下移动以将工件上表面标贴压实。
31.下料输送部下料输送部4设置在所述上料输送带51的一侧,多工位带动对应工件转动至下料输送部4下方时,下料输送部4能够将多工位转盘1上的工件夹取并输送下料。
32.下面具体说明下料输送部4的结构,所述下料输送部4包括:下料输送带41、两档条42和下料搬运组件。所述下料输送带41固定在所述工作台上,所述下料输送带41一端靠近所述多工位转盘1,下料输送带41能够将工件从靠近多工位转盘1的一端,向远离多工位转盘1的一端输送。两档条42分别固定在所述下料输送带41的两侧,两档条42的间距不小于工件的宽度,两档条42能够对工件进行限位,以防止工件从下料输送带41上脱落。所述下料搬运组件设置在所述下料输送带41上方,下料搬运组件能够将定位夹具11上的工件夹取并搬运至下料输送带41上。
33.为了实现上述效果,所述下料搬运组件包括:下料支架43、下料气缸44、下料夹取气缸45和下料机械夹手46。所述下料支架43固定在所述下料输送带41上方,下料支架43上适于支撑下料气缸44。所述下料气缸44水平固定在所述下料支架43上端,所述下料夹取气缸45竖直固定在所述下料气缸44的活动端,下料夹取气缸45的活动端竖直朝下设置。所述下料机械夹手46固定在所述下料夹取气缸45的活动端。通过上述设置,使得下料气缸44驱动所述下料机械夹手46至工件上方后,所述下料夹取气缸45驱动所述下料机械夹手46向下移动以夹取工件。
34.检测搬运部检测搬运部6设置在所述下料输送部4的下料端,工件移动至下料输送部4下料端
时,所述检测搬运部6检测工件是否合格并吸附工件外壁的灰尘。
35.下面具体说明检测搬运部6的结构,所述检测搬运部6包括:检测头61、检测气缸62、竖直气缸63、负压吸盘64、顶推板65、固定块66、两滑动板67和下料斜坡68。所述检测头61设置在所述下料输送带41的下料端上端,所述检测头61适于检测工件外壁光滑度是否合格。具体来说,下料输送带41驱动工件移动至检测头61下方时,所述检测头61检测工件是否合格。所述下料斜坡68固定在所述下料输送带41的一侧,且所述下料斜坡68与所述下料输送带41互相垂直,下料斜坡68适于引导合格的工件下料。所述检测气缸62水平固定在所述工作台上,检测气缸62设置在下料斜坡68一侧,且所述检测气缸62沿所述下料斜坡68长度方向设置,检测气缸62的活动端水平朝向下料输送带41。所述竖直气缸63固定在所述检测气缸62的活动端,竖直气缸63的活动端竖直朝上设置。所述固定块66固定在所述竖直气缸63的活动端,且所述固定块66设置在所述下料斜坡68的上方。检测气缸62和竖直气缸63能够分别驱动固定块66水平以及竖直移动,以使固定块66能够在下料输送带41和下料斜坡68之间移动。所述固定块66呈
ꢀ“
︹”型,所述负压吸盘64固定在所述固定块66上,且所述负压吸盘64朝下设置。负压吸盘64内设置有一气泵,负压吸盘64移动至与工件上表面相抵时,气泵能够将负压吸盘64与工件之间的空气抽走,以使负压吸盘64将工件吸附。工件吸附完成后,检测气缸62和竖直气缸63能够将固定板带动工件从下料输送带41转运到下料斜坡68上。所述顶推板65垂直固定在所述固定块66侧壁,且所述顶推板65朝向所述负压吸盘64。两滑动板67可滑动的设置在所述固定块66的下端,其中一个滑动板67侧壁开设有一与所述顶推板65相适配的通槽,滑动板67固定块66内侧壁水平滑动时,顶推板65能够凸出滑动板67。检测头61检测工件合格时,所述检测气缸62驱动所述固定块66将工件转移到下料斜坡68上,并配合下料斜坡68对工件进行下料。检测头61检测工件不合格时,所述检测气缸62驱动固定块66在下料输送带41上水平移动,以使顶推板65插入工件侧壁,并使工件形成一个凹槽,以便于操作人员辨识不合格的工件。
36.为了实现对工件进行标记的效果,每所述滑动板67下端开设有一限位槽,限位槽沿滑动板67长度方向开设,下输送带靠近检测头61的一端两侧固定设置有两凸起块411,两凸起块411相对设置,且两凸起块411分别与两限位槽适配。检测气缸62驱动固定块66向下移动并吸附工件时,滑动板67通过限位槽插入对应凸起块411内,从而将两滑动块限位,若工件合格,负压吸盘64将工件吸附并搬运工件。若工件不合格,滑动板67通过限位槽插入对应凸起块411内后,工件移动至两滑动板67之间,两滑动板67将工件限位。检测气缸62驱动固定块66向下料斜坡68方向滑动,固定块66带动顶推板65同步滑动,由于工件在两滑动板67之间,两滑动板67与凸起块411互相插接,以使顶推板65插入工件侧壁,并形成一凹槽。为了进一步驱动滑动板67复位,固定板内侧壁固定有一复位弹簧671,复位弹簧671另一端与滑动板67侧壁固定,凸起块411与限位槽脱离后,复位弹簧671能够顶推滑动板67复位,以使顶推板65缩回滑动板67内。不合格工件标识完成后,竖直气缸63驱动固定块66远离工件,操作人员能够将不合格的工件从下料输送带41上取下。
37.负压吸盘64内部设置有若干气道,滑动板67内部中空,且滑动板67内侧壁开设有若干吸气孔672,吸气孔672与气道连通,气道能够与负压吸盘64连通。竖直气缸63驱动负压吸盘64与工件相抵时,竖直气缸63驱动固定块66继续向下移动,以使工件推动负压吸盘64向上滑动,以使气道与负压吸盘64连通,负压吸盘64内的气泵能够通过气道吸取滑动板67
内的空气,以使滑动板67内形成负压,滑动板67通过吸气孔672向工件外壁吸气,从而吸附工件外壁的灰尘。负压吸盘64与固定块66内顶壁之间还固定有一顶推弹簧641,负压吸盘64与工件脱离后,顶推弹簧641能够向下顶推负压吸盘64,以使负压吸盘64复位。
38.此外,为了进一步在下料斜坡68上对工件是否合格进行检测,下料斜坡68的上端具有一平台,以及平台上设置有一限位块681,限位块681与限位槽适配,检测气缸62驱动负压吸盘64将工件移动至下料斜坡68时,与顶推板65连接的一侧滑动板67对应的限位槽插入限位块681,检测气缸62驱动固定块66向远离下料输送带41方向滑动,若工件合格,则随着固定块66移动,顶推板65伸出滑动板67并顶推滑动板67进入下料斜坡68的斜坡面。若工件不合格,则随着固定开移动,顶推板65伸出滑动板67并插入凹槽内,即顶推板65无法推动工件进入下料斜坡68的斜坡面,以提醒操作人员及时将不合格工件取走。
39.以上依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1