电能表安装更换智能辅助平台的制作方法
1.本技术涉及配电技术领域,特别涉及电能表安装更换智能辅助平台。
背景技术:
2.本部分的陈述仅仅是提供了与本技术相关的背景技术信息,不必然构成在先技术。
3.随着近年来台区经理逐渐减少,像更换、新装电能表这种需要三人开展的工作占用了供电所大量人力。此项工作需要登梯,在更换多块电能表时,台区经理随身的包装不开多块电能表,在人手不足的情况下可能只有两人在工作现场,只能由监护人进行传递,严重违反安规,同时容易出现电能表掉落摔坏或监护人疏忽监护导致作业人员发生危险,而在一些情况下甚至只有一人在工作现场,无人监护。
4.考虑到现在台区经理年龄偏大,任何危险的发生都可能导致难以预想的后果,为了减少安全事故的发生,方便台区经理电能表更换工作,一种能够降低人力需求、保护操作人员、防止电能表掉落损坏的辅助设备成为了亟待解决的技术问题。
技术实现要素:
5.本技术为了解决上述问题提出了电能表安装更换智能辅助平台,可实现一监护人加一操作员两人更换电能表,智能传递电能表以辅助操作人员单独完成多电能表的更换,监护人员只需监护即可,降低了对人力的需求,提高了更换过程中的人员安全系数。
6.本技术提供了电能表安装更换智能辅助平台,包括底部设置有移动轮的机柜,机柜上设置有升降台、保护围栏,机柜后侧端面开设有顶部贯通的升降槽,所述升降台包括可升降设置于升降槽内的支撑台,所述保护围栏包括围设于升降槽上方的u型杆且与支撑台活动连接,u型杆前侧弯杆上套设有操作台;机柜内部开设有储存仓,前部设置有操作门,顶部前侧开设有沿左右方向对称开设有两个与储存仓贯通的输送口,储存仓内设置有两个输送机构,机柜顶部相对于升降槽的两侧分别开设有后部贯通的转向槽,所述转向槽内设置有机械臂,输送机构用于将电能表通过输送口输送至机柜顶部,机械臂用于将电能表传递给操作员;所述操作台内嵌设有与升降台、保护围栏、输送机构、机械臂电连接的控制器。
7.优选地,所述机柜内部相对于升降槽两侧分别开设有驱动内腔,升降槽两侧开设有与驱动内腔贯通的滑动槽,所述升降台包括固设于驱动内腔顶部的驱动电机,驱动电机输出轴的底部末端连接有主丝杠,所述主丝杠的底部旋转连接于轴承座,轴承座固设于驱动内腔底部,两个主丝杠上设置有滑动块,两个滑动块滑动贯穿滑动槽分别连接于支撑台的左右两侧。
8.优选地,所述保护围栏包括设置于升降槽两侧的滑动套筒,所述滑动套筒贯穿机柜顶壁延伸至驱动内腔,滑动块一侧设置有连接块,连接块顶部垂设有连接基杆,所述连接基杆顶部滑动插设于滑动套筒,滑动套筒底部相对于连接基杆外周设置有离合座,所述离合座与连接基杆活动连接,滑动套筒顶部设置有安装块,u型杆的两端连接于两个安装块,
其中一个安装块的后侧垂设有铰接轴,另一个的后侧端面连接有锁紧座,两个安装块之间设置有保护横杆,所述保护横杆的一端套设于铰接轴,另一端与锁紧座活动连接。
9.优选地,所述离合座包括环设于连接基杆外周且固接于滑动套筒底部的安装套筒,安装套筒内壁上均匀开设有若干个压持槽,所述压持槽内嵌设有压持伸缩机构,所述压持伸缩机构的伸缩轴末端连接有离合压块;
10.所述锁紧座朝向对侧安装块的一侧开设有顶部贯通的锁紧槽,保护横杆的末端活动设置于锁紧槽,锁紧槽的侧壁上嵌设有电动锁销,保护横杆的末端一侧开设有与电动锁销适配的销孔;机柜后侧端面设置有与控制器电连接的用户识别装置。
11.优选地,所述保护横杆的前侧设置有弹性靠背,所述弹性靠背前侧设置有安全带。
12.优选地,所述保护围栏上还设有与控制器电连接的防掉落机构,所述防掉落机构包括弹性网兜,所述操作台后侧端面开设有限位槽,所述限位槽内可升降设置垂设有电动限位杆,所述u型杆的两侧直杆上前后依次套设有连接座和伸缩座,所述连接座连接于伸缩座的伸缩轴,所述弹性网兜卡设于电动限位杆和限位槽前侧壁之间,其前侧固接于限位槽前侧壁,后侧两端分别连接于两个连接座,所述支撑台上设置有感应部竖直朝上的超声波传感器。
13.优选地,所述输送机构包括垂设于储存仓内的传送带,所述传送带上均匀设置有若干托盘,所述托盘上设置有夹持机构,托盘顶部开设有盛放槽,所述夹持机构包括对称设于盛放槽前后侧壁和左右侧壁上的4个第三伸缩机构,所述第三伸缩机构的伸缩轴末端设置有弹性压块,盛放槽底部开设有检测孔,所述检测孔顶部设置有压敏块,所述压敏块的上下两侧均设置有压敏单元,检测孔底部设置有缓冲弹簧,缓冲弹簧顶部连接有触发滑块,触发滑块滑动设置于压敏孔,托盘内部嵌设有分控器和电池组,所述分控器与夹持机构、压敏块电连接,所述传送带与控制器电连接。
14.优选地,所述机械臂包括垂直嵌设于转向槽底部的旋转电机,所述旋转电机输出轴顶部末端连接有第一伸缩杆,所述第一伸缩杆的伸缩轴顶部设置有翻转座,所述翻转座为顶部朝上的u型块,其两个竖臂之间旋转设置有翻转轴,一侧竖臂上设置有翻转电机,翻转电机输出轴连接翻转轴,所述翻转轴上套设有第二伸缩杆,第二伸缩杆的伸缩轴末端设置有机械手。
15.优选地,所述机械手包括连接于第二伸缩杆伸缩轴的安装基座,所述安装基座远离第二伸缩杆的一侧开设有驱动滑槽,所述驱动滑槽的两侧转动设置有夹持丝杠,所述夹持丝杠上滑动设置有两个夹持滑块,所述安装基座一侧嵌设有夹持电机,所述夹持电机的输出轴连接于夹持丝杠,两个加持滑块上连接有夹持压杆。
16.优选地,两个夹持压杆的相对侧壁上设置有两组对射式光电传感器。
17.与现有技术相比,本技术的有益效果为:
18.(1)本技术通过升降台和保护围栏,实现了操作人员的安全升降,保护围栏与升降台活动连接,便于根据人员不同调整保护围栏和升降台的相对高度。
19.(2)本技术通过输送机构和机械臂实现了电能表在机柜内部储存仓、机柜顶部、操作人员之间的传递,使操作人员可单独更换大量电能表,无需另有人员传递电能表,降低了人力资源的浪费,提高了工作效率,也提高了电能表安装更换过程中的安全性。
20.(3)本技术通过防掉落机构防止电能表或其他设备、工具的意外坠落,超声波传感
器监测操作空域,弹性网兜实时弹出以拦截掉落物,防止设备高空坠落带来的安全风险和财产损坏风险。
21.(4)本技术通过用户识别装置识别用户,防止本技术被不符合条件的人员有意或无意使用,同时,还能根据人员的不同,调整调整保护围栏和升降台的相对高度以及防掉落机构的弹性网兜的弹出区域,提高本技术使用过程中的灵活性和适应性。
附图说明
22.构成本技术的一部分的说明书附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。
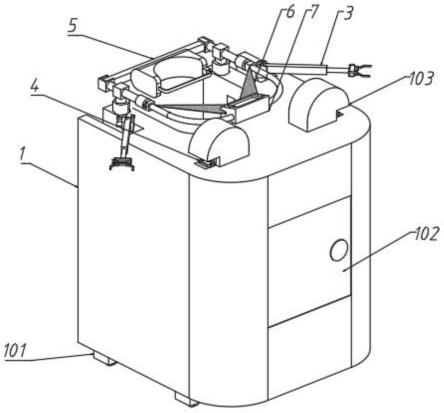
23.图1是本技术一种实施例的整体结构前视图,
24.图2是本技术一种实施例的整体结构后视图,
25.图3是本技术一种实施例的局部放大图a,
26.图4是本技术一种实施例的局部放大图b,
27.图5是本技术一种实施例的升降台和保护围栏结构示意图,
28.图6是本技术一种实施例的局部放大图c,
29.图7是本技术一种实施例的机械臂结构示意图,
30.图8是本技术一种实施例的局部放大图d,
31.图9是本技术一种实施例的保护围栏局部剖视图,
32.图10是本技术一种实施例的输送机构机构示意图,
33.图11是本技术一种实施例的机械手抓取示意图,
34.图12是本技术一种实施例的托板剖视图。
35.图中:
36.1、机柜,2、升降台,3、机械臂,4、输送机构,5、保护围栏,6、防掉落机构,7、操作台,8、用户识别装置,21、支撑台,22、驱动电机,23、主丝杠,24、滑动块,25、轴承座,31、旋转电机,32、第一伸缩杆,33、翻转座,34、翻转电机,35、第二伸缩杆,36、机械手,41、传送带,42、托盘,43、夹持机构,51、滑动套筒,52、安装块,53、u型杆,54、保护横杆,55、锁紧座,56、弹性靠背,57、离合座,58、连接基杆,59、连接块,61、弹性网兜,62、伸缩座,63、连接座,64、超声波传感器,65、电动限位杆,71、放置槽,72、操作按钮,73、限位槽,100、电能表,101、移动轮,102、操作门,103、防护罩,104、升降槽,105、转向槽,211、站立槽,361、安装基座,362、夹持电机,363、夹持丝杠,364、夹持滑块,365、夹持压杆,421、压敏块,422、触发滑块,423、缓冲弹簧,561、安全带,3651、对射式光电传感器。
具体实施方式:
37.下面结合附图与实施例对本技术作进一步说明。
38.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本公开的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
39.在本公开中,术语如“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“侧”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,只是为了便于叙述本公开各部件或元件结构关系而确定的关系词,并非特指本公开中任一部件或元件,不能理解为对本公开的限制。
40.如图1至图12所示,本技术提供了电能表安装更换智能辅助平台,包括底部设置有移动轮101的机柜1,机柜1上设置有升降台2、保护围栏5,机柜1后侧端面开设有顶部贯通的升降槽104,所述升降台2包括可升降设置于升降槽104内的支撑台21,所述保护围栏5包括围设于升降槽104上方的u型杆53且与支撑台21活动连接,u型杆53前侧弯杆上套设有操作台7。
41.机柜1内部开设有储存仓,前部设置有操作门102,顶部前侧开设有沿左右方向对称开设有两个与储存仓贯通的输送口,储存仓内设置有两个输送机构4,机柜1顶部相对于升降槽104的两侧分别开设有后部贯通的转向槽105,所述转向槽105内设置有机械臂3,输送机构4用于将电能表100通过输送口输送至机柜1顶部,机械臂3用于将电能表100传递给操作员。
42.所述操作台7内嵌设有与升降台2、保护围栏5、输送机构4、机械臂3电连接的控制器,控制器控制升降台2带动操作员升降以安装或更换电能表100,控制所述输送机构4、机械臂3实现电能表100在储存仓和操作人员之间的传递。
43.所述操作台7顶部开设有放置槽71以用于盛放工具、设备等物品,操作台7顶部相对于放置槽71两侧设置有若干与控制器电连接的操作按钮72,以用于操作本技术。
44.具体地,所述机柜1内部相对于升降槽104两侧分别开设有驱动内腔,升降槽104两侧开设有与驱动内腔贯通的滑动槽,所述升降台2包括设置于驱动内腔顶部的驱动电机22,驱动电机22输出轴的底部末端连接有主丝杠23,所述主丝杠23的底部旋转连接于轴承座25,轴承座25固设于驱动内腔底部,两个主丝杠23上设置有滑动块24,两个滑动块24滑动贯穿滑动槽分别连接于支撑台21的左右两侧,所述驱动电机22转动带动主丝杠23转动,进而带动滑动块24沿主丝杠23移动,进而带动支撑台21升降,带动操作人员升降以更换电能表100,优选地,所述支撑台21顶部开设有用于操作人人员站立的站立槽211。
45.具体地,所述保护围栏5包括设置于升降槽104两侧的滑动套筒51,所述滑动套筒51贯穿机柜1顶壁延伸至驱动内腔,滑动块24一侧设置有连接块59,连接块59顶部垂设有连接基杆58,所述连接基杆58顶部滑动插设于滑动套筒51,滑动套筒51底部相对于连接基杆58外周设置有离合座57,所述离合座57与连接基杆58活动连接,滑动套筒51顶部设置有安装块52,u型杆53的两端连接于两个安装块52,其中一个安装块52的后侧垂设有铰接轴,另一个的后侧端面连接有锁紧座55,两个安装块52之间设置有保护横杆54,所述保护横杆54的一端套设于铰接轴,另一端与锁紧座55活动连接,所述离合座57用于动态固定连接基杆58和滑动套筒51,以根据操作人员的身高不同调整u型杆53相对于支撑台21的高度,所述锁紧座55用于固定保护横杆54。
46.具体地,所述离合座57包括环设于连接基杆58外周且固接于滑动套筒51底部的安装套筒571,安装套筒571内壁上沿其中心轴线均匀开设有若干个压持槽,所述压持槽内嵌设有压持伸缩机构572,所述压持伸缩机构572的伸缩轴末端连接有离合压块573,所述压持伸缩机构572带动离合压块573朝向连接基杆58移动直至抵触于连接基杆58,实现连接基杆58与滑动套筒51的固定,反之,所述压持伸缩机构572带动离合压块573远离连接基杆58移
动,实现连接基杆58与滑动套筒51的相对滑动,当滑动块24带动连接基杆移动时,连接基杆与滑动套筒51相对运动预定距离p后离合座57动作,使连接基杆58与滑动套筒51固定,滑动块24带动整个保护围栏和支撑台21一起运动,预定距离p根据用户的不同而改变。
47.具体地,所述锁紧座55朝向对侧安装块52的一侧开设有顶部贯通的锁紧槽,保护横杆54的末端活动设置于锁紧槽,锁紧槽的侧壁上嵌设有电动锁销551,保护横杆54的末端一侧开设有与电动锁销551适配的销孔。
48.初始时,电动锁销551的销杆插入销孔以锁紧保护横杆54,当需要使用本技术时,控制器控制电动锁销551的销杆回缩与销孔脱离,用户转动所述保护横杆54以踏上支撑台21,再将保护横杆54转动至锁紧座55,控制电动锁销551的销杆插入销孔以锁紧保护横杆54,所述电动锁销551包括伸缩电缸和连接于伸缩电缸伸缩轴的销杆。
49.优选地,机柜1后侧端面设置有与控制器电连接的用户识别装置8,所述用户识别装置8用于识别用户,防止本技术被不符合条件的人员有意或无意使用,同时,还能根据人员的不同,调整调整保护围栏5和升降台2的相对高度。
50.优选地,所述保护横杆54的前侧设置有弹性靠背56,所述弹性靠背56前侧设置有安全带561,所述弹性靠背56用于提高操作人员的舒适性,所述安全带561用于进一步保护操作人员,安全带561为现有技术,其结构和使用方法本技术不再赘述。
51.具体地,所述保护围栏5上还设有与控制器电连接的防掉落机构6,所述防掉落机构6包括弹性网兜61,所述操作台7后侧端面开设有限位槽73,所述限位槽73内可升降设置垂设有电动限位杆65,所述u型杆53的两侧直杆上前后依次套设有连接座63和伸缩座62,所述连接座63连接于伸缩座62的伸缩轴,所述弹性网兜61卡设于电动限位杆65和限位槽73前侧壁之间,其前侧固接于限位槽73前侧壁,后侧两端分别连接于两个连接座63,所述支撑台21上设置有感应部竖直朝上的超声波传感器64。
52.所述超声波传感器64实时检测操作员和操作台7之间的垂直空域,当发现有电能表100或其他设备掉落时,超声波传感器64通知控制器,控制器控制电动限位杆65向下回缩,弹性网兜61立即弹出以阻挡电能表100或其他设备掉落,用户捡起电能表100后,再控制电动限位杆65向上伸长,手动将弹性网兜61复位,所述伸缩座62带动连接座63在u型杆上移动以调整弹性网兜61的保护区域,进一步地,根据用户识别装置8识别的不同用户的体型,控制器控制伸缩座62伸缩以获得适宜的保护区域。
53.为防止用户身体部位特别是手臂对超声波传感器64传感器的干扰,超声波传感器64采用速度测量方式以区分掉落物和用户身体,当超声波传感器64监测到反射物单位时间垂直下落速度大于预设值v时,通知控制器,控制弹性网兜61弹出;也可以使弹性弹性网兜64一直保持张开状态以防止电能表100意外掉落。
54.具体地,所述输送机构4包括垂设于储存仓内的传送带41,传送带41通过输送口伸出机柜1顶部,伸出部分外部包设有保护罩103,保护罩103上开设有便于机械臂3夹持的开口,所述传送带41上均匀设置有若干托盘42,所述托盘42上设置有夹持机构43,托盘42顶部开设有盛放槽,所述夹持机构43包括对称设于盛放槽前后侧壁和左右侧壁上的4个第三伸缩机构,所述第三伸缩机构的伸缩轴末端设置有弹性压块,盛放槽底部开设有检测孔,所述检测孔顶部设置有压敏块421,所述压敏块421的上下两侧均设置有压敏单元,检测孔底部设置有缓冲弹簧423,缓冲弹簧423顶部连接有触发滑块422,触发滑块422滑动设置于压敏
孔,托盘42内部嵌设有分控器和电池组,所述分控器与夹持机构43、压敏块421电连接,所述电池组用于夹持机构43、压敏块421、分控器的供电,所述传送带41与控制器电连接。
55.打开操作门102,当将电能表100放置于某个托盘42的盛放槽中后,压敏块421的上部压敏单元检测到压力,分控器控制夹持机构43的4个第三伸缩机构伸长预设距离以将电能表100固定于盛放槽中心处,控制器控制相应传送带41转动,依次将电能表100放置于各个托盘42中,在托盘42的移动过程中,压敏块421的下部压敏单元实时检测托盘42是否翻转,当托盘42倾斜或者翻转式时,缓冲弹簧423推动触发滑块422抵触于压敏块421下部,压敏块421的下部压敏单元检测到压力,分控器控制夹持机构43的4个第三伸缩机构继续伸长预设距离以加大对电能表100的压持力,防止电能表100从托盘42掉落,当托盘42运动至正向水平时(盛放槽朝上),第三伸缩机构回复初始压持状态,以便于机械臂3夹持电能表100。
56.具体地,所述机械臂3包括垂直嵌设于转向槽105底部的旋转电机31,所述旋转电机31输出轴顶部末端连接有第一伸缩杆32,所述第一伸缩杆32的伸缩轴顶部设置有翻转座33,所述翻转座33为顶部朝上的u型块,其两个竖臂之间旋转设置有翻转轴,一侧竖臂上设置有翻转电机34,翻转电机34输出轴连接翻转轴,所述翻转轴上套设有第二伸缩杆35,第二伸缩杆35的伸缩轴末端设置有机械手36。
57.所述控制器控制传送带41依次将各个托盘42传输至机柜1顶部预设位置,所述第一伸缩杆32带动翻转座33升降至托盘42对应高度,旋转电机31和翻转电机34配合旋转,带动第二伸缩杆35沿前后方向水平朝向托盘42,如图11所示,此时,第二伸缩杆35、机械手36和托盘42的中轴线共线,第二伸缩杆35带动机械手36移动预设距离,机械手36抓取电能表100,翻转电机34带动第二伸缩杆35旋转至竖直向上,操作员手持电能表100并通过操作台7控制机械手36释放电能表100,进而完成电能表100的传递。
58.两个输送机构4、机械臂3的设计便于操作人员分别接收新的电能表100和将旧的电能表100输送至储存仓,也便于操作人员根据惯用手选取适宜的输送机构4、机械臂3。
59.具体地,所述机械手36包括连接于第二伸缩杆35伸缩轴的安装基座361,所述安装基座361远离第二伸缩杆35的一侧开设有驱动滑槽,所述驱动滑槽的两侧转动设置有夹持丝杠363,所述夹持丝杠363上滑动设置有两个夹持滑块364,两个夹持滑块364螺纹相反,所述安装基座361一侧嵌设有夹持电机362,所述夹持电机362的输出轴连接于夹持丝杠363,两个夹持滑块364上连接有夹持压杆365,所述夹持电机362转动,带动夹持丝杠363转动,进而带动两个夹持滑块364沿夹持丝杠363相对或向背运动,进而夹持或释放电能表100。
60.两个夹持压杆365的相对侧壁上设置有两组对射式光电传感器3651,所述对射式光电传感器3651提高机械手的自动化水平和夹持的准确度,如图11所示,当电能表100同时遮蔽两组对射式光电传感器3651时,控制器控制夹持电机362启动,将电能表100夹持,避免了用户通过操作台7操作机械手36抓取的麻烦,也保证了机械手36、电能表100相对位置的准确。
61.所述第一伸缩杆32、第二伸缩杆35、压持伸缩机构572、第三伸缩机构、电动限位杆65为电缸,所述用户识别装置8为指纹识别装置,所述控制器为工业用控制计算机,所述分控器为单片机,所述移动轮101为可刹车万向轮。
62.本技术提供的电能表安装更换智能辅助平台的操作方法如下:
63.s100:操作人员通过用户识别装置8上传用户信息,控制器控制保护围栏5解锁,操
作人员登上支撑台21,并将保护围栏5重新上锁;
64.s200:操作人员通过操作台7控制支撑台21上升预定高度,控制器控制保护围栏5自适应调整u型杆53和支撑台21的相对高度以及弹性网兜61的保护区域;
65.s300:操作人员通过输送机构4和机械臂3实现电能表100从存储仓至操作人员之间的相互传递,防掉落机构6实时监测并防止电能表100掉落。
66.特殊情况下,操作人员可通过操作台7操作机械臂3,使第二伸缩杆35朝向水平,第二伸缩杆35带动机械手36远离机柜1朝向监护人员水平运动,实现与监护人员的工具或电能表传递。
67.以上仅为本技术的优选实施例而已,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
68.上述虽然结合附图对本技术的具体实施方式进行了描述,但并非对本技术保护范围的限制,所属领域技术人员应该明白,在本技术的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本技术的保护范围以内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1