一种物品自动化包装设备及其包装方法与流程
1.本发明涉及包装领域,尤其涉及一种物品自动化包装设备及其包装方法。
背景技术:
2.目前,中国专利申请号:cn202021424170.x公开了一种包装盒间歇式进给的包装机,包括底座、第一电机、包装机本体、第二电机和电动伸缩杆,所述底座的左端内部卡合连接有齿轮,且齿轮的前侧连接有第一电机的输出轴,所述齿轮的外侧啮合连接有皮带,且皮带的上表面设置有包装箱本体,所述底座的左右两端上表面分别固定连接有第一固定条和第二固定条,所述包装机本体位于底座的右端上侧,所述电动伸缩杆的上表面固定连接有连接块,所述第二电机位于底座的前端内侧,所述主动块的后侧卡合连接有带动块,公开了现有一般结构的包装机,该包装机为间歇式输送,由通常为人工手动放入包装盒内,但是包装物品如果包装物品可以活动转动,包装物品到包装工位时,包装物品会松垮变形,需要人工手动将包装物品恢复原来装配形状,导致生产效率低。
技术实现要素:
3.因此,针对上述的问题,本发明提出一种物品自动化包装设备及其包装方法,其解决了包装物品如果包装物品可以活动转动,包装物品到包装工位时,包装物品会松垮变形,需要人工手动将包装物品恢复原来装配形状,导致生产效率低的技术问题。
4.为实现上述目的,本发明采用了以下技术方案:一种物品自动化包装设备,包括用于将物品输入的第一输送带、用于将第一输送带上物品夹持转移的第一机械臂、用于将第一机械臂夹持物品转移输送的移动平台、用于将包装盒输入的第二输送带、用于对包装盒定位的定位装置、用于将移动平台上的物品夹持输送到第二输送带上包装盒内的第二机械臂、用于将第二输送带上包装盒盖合的第三机械臂、用于将第二输送带输出包装盒码垛的第四机械臂,所述第三机械臂和第四机械臂上设有摄像头,所述第三机械臂和第四机械臂上设有用于对包装盒吸附的吸附头;所述第一机械臂包括支撑座、设于支撑座上方的支撑柱、用于驱动支撑柱旋转的第一旋转台、可转动地设于支撑柱顶端的第一转杆、用于驱动第一转杆旋转且可转动地设于支撑柱上的第一驱动装置、可转动地设于第一转杆远离第一驱动装置一端的第二转杆、设于第一转杆上且用于驱动第二转杆旋转的第二驱动装置、可转动地设于第二转杆远离第一转杆一端的第二旋转台、设于第二旋转台远离第二转杆一端的第三转杆、设于第二旋转台上且用于驱动第三转杆旋转的第四驱动装置、可转动地设于第三转杆远离第二旋转台一端的驱动缸体、设于第三转杆上且控制驱动缸体旋转的第五驱动装置、设于驱动缸体远离第三转杆一端的连接部、设于连接部远离驱动缸体一侧的多个夹持部和用于驱动夹持部旋转的第六驱动装置,所述第一旋转台顶端面与支撑柱相连接,所述第一驱动装置远离第一旋转台一端与第一转杆可转动地连接,所述第四驱动装置两端分别与第二旋转台和第三转杆铰接,所述夹持部包括至少两个第一夹持装置以及至少两个第二夹持装置。
5.进一步的,所述第一夹持装置包括与夹持部可转动地连接的第一夹块、与第一夹块呈夹角设置的延伸块、设于第一夹块内的第一导向块、设于延伸块上的第二导向块以及滑动设于第一导向块和第二导向块内的第一齿条,所述第一夹块与第二延伸部接触部分平滑过渡,所述第一夹块与第二延伸部接触部分可转动地设有第一齿轮,所述延伸块上设有与第一齿轮可转动连接的支撑架,所述支撑架一侧设有用于驱动第一齿轮旋转的第一电机,所述第一齿轮与第一齿条啮合,所述第一齿条为柔性齿条,所述延伸块底部设有用于对柔性齿条底部进行的第一支撑部件,所述连接部靠近第一夹块一端面中部设有顶压装置,所述顶压装置底部设有吸盘,所述顶压装置底部吸盘吸附设有用于包围物品的外壳,所述外壳由两个横侧板、两个纵侧板、顶板以及底板拼接形成,所述横侧板和纵侧板软性板,所述顶板和底板为硬板,所述横侧板和纵侧板上设有向外壳内部延伸且对物品横向四周包围贴合的延伸块,所述顶板设有向外壳内部延伸的第二延伸部,所述外壳远离吸盘一端面设有圆形开孔,所述移动平台上设有与圆形开孔旋合的螺纹柱。
6.进一步的,所述外壳上设有用于外壳内部空气排出的单向阀,所述顶压装置横向一侧设有与单向阀对接的吸气管。
7.进一步的,所述第一支撑部件包括设于延伸块底部的支撑块以及设于支撑块内的第一支撑缸体,所述第一支撑缸体包括与支撑块相连接的第一缸体、滑动设于第一缸体内的第二缸体以及滑动设于第二缸体内的第三缸体,所述第二缸体上设有与第一缸体内侧相连通的限位孔,所述第一缸体设有第一气孔,所述第二缸体远离第一气缸方向设有第二气孔,所述第一缸体远离第一气孔一端设有第三气孔。
8.进一步的,所述第二夹持装置包括与夹持部相连接的第二夹块、设于第二夹块内的第四导向块、滑动设于第四导向块内且用于对两个间隔的第一夹块侧面覆盖的第三齿条、可转动地设于第二夹块上且与第三齿条啮合的第四齿轮、用于驱动第四齿轮旋转的第三电机以及设于第二夹块上远离第三齿条一端面的连接块,所述连接块内横向两侧设有第二支撑缸体,所述第二支撑缸体底部设有用于对第三齿条横向两侧底部遮挡的遮挡块。
9.进一步的,所述第一夹块和第二夹块顶部分别设有对第一齿条和第三齿条180度弯折的弯折件,所述弯折件内设有用于第一齿条和第三齿条穿过中空部。
10.进一步的,所述第一支撑部件包括设于第一夹块和延伸块外侧的第三导向块,所述第三导向块位于延伸块中部位置设有导向口,所述第三导向块内滑动连接设有第二齿条,所述第一夹块上可转动连接设有与第二齿条相啮合的第二齿轮,所述第二齿轮间隔设于第一夹块顶部上方,所述延伸块位于导向口处设有与第二齿条相啮合的第三齿轮,所述第一夹块上设有与第一齿轮和第二齿轮相连接的同步带,所述第一夹块上设有用于驱动第二齿轮旋转的第二电机;所述第一齿条靠近第二齿条一端面设有第一软磁条,所述第二齿条靠近第一齿轮一端面设有与第一软磁条吸合的第二软磁条。
11.进一步的,所述延伸块远离第一齿轮一端厚度逐渐减小,所述延伸块上设有从左到右、从下到上倾斜的斜面,所述延伸块远离第一齿轮一端面设有形状为三角形的分离块;所述第一齿条和第二齿条远离第一齿条一端分别设有第一磁铁和第二磁铁,靠近所述第一磁铁和第二磁铁另一侧的第一齿条和第二齿条内设有与第一磁铁和第二磁铁吸合的第三磁铁。
12.通过采用前述技术方案,本发明的有益效果是:
本物品自动化包装设备,通过第一机械臂、移动平台和第二机械臂配合,物品可保持装配状态,同时可自动对物品进行包装,解决了物品输送时会松垮变形,需要人工手动将包装物品恢复原来装配形状,再由人工手动放入包装盒内,导致生产效率低;进一步的,第一夹持装置的设置,通过驱动第一齿条滑动,对包装物底端面进行包围,不需要夹块横移张开,更方便第一夹块插入小型物品包装;进一步的,单向阀的设置,延伸块将进一步与物品紧贴,与物品装配状态紧贴可进一步防止变形物品松动变形,可持续保持装配形态;第一支撑部件的设置,该三段式推送气缸,相比两段式推送气缸,相同收缩状态下的缸体,推送距离更远,减少第一缸体所占用空间;第二夹持装置的设置,对第一齿面一侧进行盖合,第一齿面和第三齿面将对夹持物进行包围夹持,可防止夹持物从第一齿面前后空面掉出的缺点;弯折件的设置,第一齿条通过折弯件将180弯折,并通过弯折板向下导向输出,避免第一齿条顶部乱移动;通过第一支撑部件的设置,该第一支撑部件改善了结构,保持在保持支撑性能的同时,具有占用空间小的优点。
附图说明
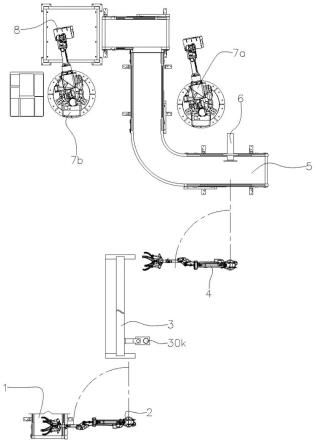
13.图1是本发明的现有变形物品结构参考示意图;图2是本发明的结构俯视示意图;图3是本发明的第四机械臂和第二输送带使用状态结构平面示意图;图4是本发明的第一机械臂结构示意图;图5是本发明的第一夹持装置和第二夹持装置结构平面示意图;图6是本发明的第一夹持装置结构平面示意图;图7是本发明的第一夹持装置内部结构平面示意图;图8是本发明的外壳结构示意图;图9是本发明的外壳结构剖面示意图;图10是本发明的第一支撑部件与第二齿条使用状态平面结构示意图;图11是本发明的第一支撑部件结构示意图;图12是本发明的第一夹持装置局部结构右视示意图;图13是本发明的方法流程简画示意图。
具体实施方式
14.现结合附图和具体实施方式对本发明进一步说明。参考图1至图13,本实施例提供一种物品自动化包装设备,包括用于将物品输入的第一输送带1、用于将第一输送带上物品夹持转移的第一机械臂2、用于将第一机械臂夹持物品转移输送的移动平台3、用于将包装盒输入的第二输送带5、用于对包装盒定位的定位装置6、用于将移动平台上的物品夹持输送到第二输送带上包装盒内的第二机械臂4、用于将第二输送带上包装盒盖合的第三机械臂7a、用于将第二输送带输出包装盒码垛的第四机械臂7b,所述第三机械臂和第四机械臂上设有摄像头8,所述第三机械臂和第四机械臂上设有用于对包装盒吸附的吸附头9,第一机械臂和第二机械臂结构相同;所述第一机械臂2包括支撑座41、设于支撑座41上方的支撑柱42、用于驱动支撑柱42旋转的第一旋转台43、可转动地设于支撑柱42顶端的第一转杆44、用于驱动第一转杆44旋转且可转动地设于支撑柱42上的第一驱动装置45、可转动地设于第
一转杆44远离第一驱动装置45一端的第二转杆46、设于第一转杆44上且用于驱动第二转杆46旋转的第二驱动装置47、可转动地设于第二转杆46远离第一转杆44一端的第二旋转台48、设于第二旋转台48远离第二转杆46一端的第三转杆49、设于第二旋转台48上且用于驱动第三转杆49旋转的第四驱动装置410、可转动地设于第三转杆49远离第二旋转台48一端的驱动缸体411、设于第三转杆49上且控制驱动缸体411旋转的第五驱动装置412、设于驱动缸体411远离第三转杆49一端的连接部413、设于连接部413远离驱动缸体411一侧的多个夹持部414和用于驱动夹持部414旋转的第六驱动装置415,所述第一旋转台43顶端面与支撑柱42相连接,所述第一驱动装置45远离第一旋转台43一端与第一转杆44可转动地连接,所述第二转杆46优选地包括与第一转杆44可转动连接的第一外杆46a、与第二旋转台48固定连接的第一内杆46b以及用于驱动第一外杆46a和第一内杆之间距离的第三驱动装置46c,所述第一外杆46a与第一内杆46b滑动连接,所述第三驱动装置46c两端别分与第一外杆46a和第一内杆铰接,所述第四驱动装置410两端分别与第二旋转台48和第三转杆49铰接,所述连接部底部优选地等角度设有四个夹持部;第二旋转台的设置,如果夹持部夹持物件需要翻转180度时,通过第四驱动装置先将第三转杆和驱动缸体伸直,完成后旋转180度,在旋转到特定位置卡入外部包装盒内,该机械手臂通过五个驱动装置控制夹持部摆动角度,并且增加第二旋转台对工件实现180度旋转,自由度相比相同机械手臂更高,适用行业更多更广;所述夹持部414包括至少两个第一夹持装置4141以及至少两个第二夹持装置4142;可变形物品可参考图1,该变形物品为本包装设备所要包装物品,当需要对变形物品夹持时,变形物品包括车架部1’,车架部横向一侧可转动连接设有车头翻折部2’,车架部横向另一侧可转动连接设有两个车腿部5’,车腿部可转动连接设有车尾外壳6’,所述车架纵向两侧可转动连接设有车臂部3’,车臂部远离车架部一端活动连接有车门外壳4’,当该玩具为本包装设备所要包装物品,由于该变形物品在使用中可活动,通常通过人工装配后,再通过输送带输送到包装工位,由人工手动放入包装盒内,优选地为变形玩具或者其它变形物品,本包装物品不限于图1中的形式,可包装现有所有松散的物品,图1中的样式仅提供参考,图13左上角第一个为包装物品简画示意图;该包装物品在使用中可活动,通常通过人工装配后,再通过输送带输送到包装工位,其中第一输送带将装配的物品输入,通过第一旋转台将夹持部旋转到第一输送带上方,完成后再通过第二驱动装置驱动第一转杆和第二转杆展开,完成后再通过第四驱动装置驱动驱动缸体向下摆动,驱动缸体底部的夹持部将垂直朝下,驱动缸体再驱动连接部向下移动,横轴两侧的夹持部通过第六驱动装置调整至物品横轴宽度,纵轴两侧的夹持部通过第六驱动装置调整至物品纵轴宽度以实现对物品进行夹持,完成后驱动缸体驱动夹持部向上移动离开输送带,第二驱动装置和第四驱动装置调整机械手臂相应的垂直抬起,完成后第一旋转台将夹持部旋转到移动平台上方,当距离不够时,第三驱动装置驱动第一外杆和第一内杆分离,增加夹持部移动距离,同时,驱动缸体也可以进一步增加夹持部移动距离,该机械手臂夹持距离更大,应用范围更广;再通过移动平台移动到第二机械臂上,第二机械臂通过内置夹持部对物品包围夹持输送到包装盒内,通过第二输送带输送经过第三机械臂,第三机械臂将外部包装盖固定盖合在包装盒顶端面,再通过第四机械臂将包装盒码垛堆放;输送过程中无需人工手动进行将物品放入包装盒内,并且夹持部对物品前后左右包围夹持,移动过程中物品不易松散,第二机械臂直接对移动平台输出的物品前后左右包围夹持转移到包装盒内,物品可保持装配状态,同时可自动对物品进
行包装,解决了物品输送时会松垮变形,需要人工手动将包装物品恢复原来装配形状,再由人工手动放入包装盒内,导致生产效率低。
15.所述第一夹持装置包括与夹持部可转动地连接的第一夹块4301、与第一夹块呈夹角设置的延伸块4302、设于第一夹块内的第一导向块4303、设于延伸块上的第二导向块4304以及滑动设于第一导向块和第二导向块内的第一齿条4305,所述第一夹块与第二延伸部接触部分平滑过渡,所述第一夹块与第二延伸部接触部分可转动地设有第一齿轮4306,所述延伸块上设有与第一齿轮可转动连接的支撑架4307,所述支撑架一侧设有用于驱动第一齿轮旋转的第一电机4308,所述第一齿轮与第一齿条啮合,所述第一齿条为柔性齿条,所述延伸块底部设有用于对柔性齿条底部进行的第一支撑部件43a,所述连接部413靠近第一夹块一端面中部设有顶压装置30a,所述顶压装置底部设有吸盘30b,所述顶压装置底部吸盘吸附设有用于包围物品的外壳30c,所述外壳30c由两个横侧板30d、两个纵侧板30e、顶板30f以及底板30g拼接形成,所述横侧板30d和纵侧板30e上设有向外壳30c内部延伸且对物品横向四周包围贴合的延伸块30h,所述顶板30f设有向外壳30c内部延伸的第二延伸部30i,所述外壳30c远离吸盘30b一端面设有圆形开孔30j,所述移动平台3上设有与圆形开孔30j旋合的螺纹柱30k;螺纹柱和海绵块可具体参考图13;圆形开孔30j优选地为螺纹孔,或者替换为与螺纹柱插接的插孔,螺纹柱为光滑表面,外壳圆形开孔与螺纹柱为现有卡扣连接,或替换为现有其他可拆卸连接方式,可实现螺纹柱与外壳可拆卸连接即可;所述螺纹柱30k靠近外壳30c一端面中部设有海绵块30n,可避免螺纹柱旋合过紧与物品接触导致表面产生损坏的问题;物品装配精度低,尤其为玩具变形物品,直接通过夹持部夹持,各物品装配精度低,对物品装夹过程中容易造成损坏,夹过紧容易导致物品损坏,夹的过松,容易导致物品从夹块内脱落;通过第一夹持装置的设置,其中当物品经过顶压装置下方时,第六驱动装置驱动夹持部展开,完成后顶压装置通过内置推杆带动吸盘向下移动,吸盘带动外壳套设在物品外侧,完成后,外部顶压装置a上升将物品顶起,同时,顶压装置随着外部顶压装置a上升而向上移动,完成后物品将位于齿条上方,第一电机驱动第一齿轮旋转,第一齿轮旋转带动第一齿条向第一夹持装置中心位置移动,两侧方向的第一齿条移动到物品件下方时,外部顶压装置将向下退出,变形物品将置于第一齿面上,第一支撑部件为两面第一齿面之间的位置进行支撑,避免变形物品过重从两个第一齿面之间向下掉落,该夹持方式相比传统夹具用两个夹块对变形物品两个进行受力夹持,通过两个第一齿条将变形物品托起,夹持部通过五个驱动装置调整方向后,再通过第二旋转台旋转180度,由于外壳内置纵侧板和顶板延伸块和第二延伸部对变形物品横向外侧和顶端贴合进行包围,顶压装置向下移动外壳内置物品底端面将贴合在第一齿面上,由于变形物品为包围状态,可避免旋转过程中松散,旋转180度后;第六驱动装置驱动夹持部张开,顶压装置带动外壳上升,使外壳底端两端与第一夹块平行,第六驱动装置再驱动夹持部内置延伸块对外壳横向两侧进行夹持,完成后移动平台带动螺纹柱移动到外壳圆形开孔上方,移动平台驱动螺纹柱与圆形开孔旋合固定,第六驱动装置驱动夹持部张开,顶压装置底部的吸盘通过外部气动系统与外壳分离,完成后移动平台直接通过螺纹柱带动外壳移动,移动平台可带动变形物品输送较远的距离,输送过程中由于通过外壳对变形物品进行包围保护,长距离输送中即使移动平台走走停停,变形物品也不会松散,该外壳朝下移动时,变形物品车架部1’上方,该朝上的状态将变形物品外围置于外壳内,变形物品向上的活动角度少,变形物品朝向上方输送时,更不易
松散松动,保持好的装配状态完成后,将移动到第二机械臂对接位置时,第二机械臂内置第六驱动装置驱动夹持部张开,待外壳进入第一夹块内部时,顶压装置向上驱动带动吸盘与外壳吸合,第六驱动装置驱动夹持部对外壳横向两侧夹紧,移动平台逆向旋转与外壳分离,完成后再通过第一夹持装置内置第一齿轮驱动第一齿条再对外壳包围,第二机械臂再带动内置夹持部逆向旋转180度,第二输送带将物品盒输入,通过定位装置时,定位装置向前移动对物品盒进行定位,完成后第二机械臂通过内置第一旋转台旋转到第二输送带物品盒上方,再通过各个驱动装置和调整方向后,将插入物品盒内,完成后内置齿轮旋转带动第一齿条向横向两侧展开分离,内置变形物品将下落到物品盒内指定包装位置处,物品盒内置托板对物品物件底部和横向外围进行包围,通过第二输送带输送时,物品物件将不会松散,物品物件通过第三机械臂时,第三机械臂将外部输入的物品物件内部端盖固定盖合在物品盒内,再将物品盒顶端盖子盖合密封在物品盒顶部,再通过第二输送带输送到尾部时,通过第四机械臂上对物品盒进行抓取码垛;可将物品物件持续保持装配状态,即使装夹过程中夹持部剧烈晃动,外壳内物品物件也不会产生松散,物品物件将保持同一形态,避免输送带在对物品物件走走停停时,物品物件容易松散,导致需要人工手动恢复形状的缺点;并且外壳对物品物件包围保护,可避免传统的夹块对物品物件受力夹持装夹时,对物品物件产生损坏的缺点;优选地,第一夹块和延伸块呈90度夹角设置,或者为其它角度夹角;第一电机带动第一齿轮旋转时,将带动第一齿条从第一导向块和夹块之间滑动,通过第一齿条弯折90度,向第一夹持装置中心位置移动,延伸块和第一齿轮体积可根据实际使用情况进行适量缩小,不限于附图中所展示的尺寸,由于延伸块和齿轮体积占用空间小,只要两个第一夹块可插入外部包装内,在对两个第一夹块内夹持物品放置掉落到包装内时,通过驱动第一齿条滑动,对包装物底端面进行包围,不需要夹块横移张开,更方便第一夹块插入小型物品包装,直接通过带动第一齿条向上滑动,使物品掉落到包装内。
16.所述外壳30c上设有用于外壳30c内部空气排出的单向阀30l,所述顶压装置30a横向一侧设有与单向阀30l对接的吸气管30m;单向阀的设置,其中顶压装置向下与顶板贴合过程中,顶压装置横向一侧的吸气管与单向阀对接,外部气动系统与吸气管相接,当螺纹柱插入外壳圆形开孔时,外部气动系统通过吸气管和单向阀将外壳内气体吸出,外壳的横侧板和纵侧板收缩,延伸块将进一步与物品物件紧贴,与物品物件装配状态紧贴可进一步防止变形物品松动变形,将保持销售形态,并且当吸盘与外壳分离时,连接管也将与单向阀分离,外壳内由于与螺纹柱旋合密封,即使吸气管与外壳分离,外壳内也保持负压状态,在通过输送平台输送时,也将外壳也保持与物品紧密贴合状态,利于物品输送,第四机械臂内没有设有吸气管,此时无需输送;所述横侧板30d和纵侧板30e软性板,所述顶板30f和底板30g为硬板,单向阀收缩时,横侧板30d和纵侧板30e为软板,容易形变相内部收缩,软性板具体的为软性塑料薄壳,硬板为厚度较厚的硬质塑料板,在输送过程中与吸盘和螺纹柱配合不易损坏;单向阀具体为单向通气阀,当对外壳吸气时,气流通过单向阀内置硅胶垫弯曲变形,当外壳内部为负压状态时,单向阀内置硅胶垫对外壳单向阀通气孔遮挡,避免进气。
17.所述第一支撑部件43a第一使用状态包括设于延伸块30h底部的支撑块4309以及设于支撑块4309内的第一支撑缸体4310,所述第一支撑缸体4310包括与支撑块4309相连接的第一缸体43b、滑动设于第一缸体43b内的第二缸体43c以及滑动设于第二缸体43c内的第三缸体43d,所述第二缸体43c上设有与第一缸体43b内侧相连通的限位孔43e,所述第一缸
体43b设有第一气孔43f,所述第二缸体43c远离第一气缸方向设有第二气孔43g,所述第一缸体43b远离第一气孔43f一端设有第三气孔43h;通过第一支撑部件的设置,其中第一气孔和第三气孔与外部气动系统相连,完成后,需要驱动第三缸体移动时,通过外部气动系统将第一气孔通气,第二缸体将向前移动,第一缸体内的空气从第三气孔排出,完成后第一气孔继续通气,第三气缸继续向前移动,第二缸体内的空气从第二气孔内排出,再通过第三气孔排出,该三段式推送气缸,相比两段式推送气缸,相同收缩状态下的缸体,推送距离更远,减少第一缸体所占用空间,更方便在小的空间内伸缩,利于使用。第一缸体、第二缸体以及第三缸体外侧分别套设有第一支撑套43k、第二支撑套43l以及第三支撑套43m,所述第一支撑套、第二支撑套以及第三支撑套顶端面分别设有支撑片43n,三个所述支撑片顶端面位于同一个平面对第一齿面底端面支撑,当三个缸体展开后,顶端面的支撑片可对顶端的第一齿面支撑,相比单个气缸在底部支撑,支撑效果更好,并且与三个缸体配合,支撑点更多,不影响缸体行程距离。
18.所述第二夹持装置4142包括与夹持部414相连接的第二夹块4401、设于第二夹块4401内的第四导向块4402、滑动设于第四导向块4402内且用于对两个间隔的第一夹块4301侧面覆盖的第三齿条4403、可转动地设于第二夹块4401上且与第三齿条4403啮合的第四齿轮4404、用于驱动第四齿轮4404旋转的第三电机4405以及设于第二夹块4401上远离第三齿条4403一端面的连接块4406,所述连接块4406内横向两侧设有第二支撑缸体4407,所述第二支撑缸体4407底部设有用于对第三齿条4403横向两侧底部遮挡的遮挡块4408。第四齿轮可以设有两个,分别位于第三齿条上下两端,也可以设有一个,根据实际使用情况进行调整;第二夹持装置的设置,其中第一夹持装置内的两个第一齿面向中贴合后,第三电机驱动第四齿轮旋转,第四齿轮旋转带动第三齿条向下移动,第三齿条向下移动过程中,对第一齿面一侧进行盖合,第一齿面和第三齿面将对夹持物进行包围夹持,可防止夹持物从第一齿面前后空面掉出的缺点;第二支撑缸体的设置,其中第二支撑缸体可驱动遮挡块向下移动,遮挡块可对位于第二夹块横向两侧的第三齿条进行遮挡,由于第三齿条向下滑动过程中,与第一齿条贴合部位卷起翘起导致具有一定空隙,遮挡块对第三齿条盖合时,可压制住第三齿条翘起部分,第三齿条将与第一齿条紧紧贴合,避免了第三齿条与第一齿条贴合过程中容易翘起产生间隙的问题,对加持物密封效果更好,加持物更不容易从第一齿条和第三齿条包围的空间内掉出。
19.所述第一夹块4301和第二夹块4401顶部分别设有对第一齿条4305和第三齿条4403进行180度弯折的弯折件,所述弯折件内设有用于第一齿条4305和第三齿条4403穿过中空部;所述中空部位于中间位置设有分隔板416a,所述折弯件形状为由左向右、由下到上的倾斜的椭圆状;通过折弯件的设置,其中第一齿条长度过长时,通过第四齿轮驱动向上移动,第一齿条通过弯折件内的中空部,由于弯折件形状为由左向右、由下到上的倾斜的椭圆状,第一齿条通过折弯件将180弯折,并通过弯折板向下导向输出;第二夹持装置内的分隔板纵轴位置与第四导向块间隔设置,可防止第三齿条向下移动过程中弯折部分与齿面接触。所述第一支撑部件43a第二使用状态包括设于第一夹块4301和延伸块4302外侧的第三导向块4311,所述第三导向块4311位于延伸块4302中部位置设有导向口4312,所述第三导向块4311内滑动连接设有第二齿条4313,所述第一夹块4301上可转动连接设有与第二齿条4313相啮合的第二齿轮4314,所述第二齿轮4314间隔设于第一夹块4301顶部上方,所述延
伸块4302位于导向口4312处设有与第二齿条4313相啮合的第三齿轮4315,所述第一夹块4301上设有与第一齿轮4306和第二齿轮4314相连接的同步带4316,所述第一夹块4301上设有用于驱动第二齿轮4314旋转的第二电机4317;所述第一齿条4305靠近第二齿条4313一端面设有第一软磁条4320,所述第二齿条4313靠近第一齿轮4306一端面设有与第一软磁条4320吸合的第二软磁条4321。也可以不设有同步带,直接设置一内置电机驱动第三齿轮旋转也可以,或者替换为其它形式,可实现该功能即可;若第二齿条内含有铁丝,可不设有第三齿轮,直接通过第二齿轮驱动第二齿条上下移动即可;虽然第一齿条从名字上来看为窄性条状物,参考附图6~7,齿条具体可以为柔性齿面板通过第一支撑部件的设置,相比于用气缸对第一齿面底端面支撑,但受气缸结构影响,即使是用多节收缩气缸,由于气缸需要远距离行程,最终收缩状态下受占用一定的空间;其中两个齿条需要向中间位置移动时,第一电机驱动第一齿轮带动第一齿条移动时,第二电机将同时带动第二齿轮旋转,第二齿轮旋转带动第二齿条向下移动,通过第三导向块弯折从底部输出,同时,第三齿轮将带同步带动齿条向一侧移动,第二齿条移动速度将控制与第一齿条移动速度相同,第一齿条和第二齿条将同时从延伸块输出向中部位置移动,输出的第一齿条上的和第二齿条第一软磁条和第二齿条上的第二软磁条吸合,完成后同时向中间位置移动,上下两个齿条通过软磁条吸合,第一齿条和第二齿条硬度更好,第一齿条和第二齿条支撑性好,且更不易受力弯曲变形,方便支撑更重的物品,该第一支撑部件改善了结构,保持在保持支撑性能的同时,具有占用空间小的优点;避免用气缸收缩状态下受占用一定的空间的缺点;第二齿轮克位于同步带顶部,由于第二齿轮位于同步带顶部,第一夹块底部插入外部包装即可,顶部第二齿轮不插入,该设置方式具有占用空间更小的好处。
20.所述延伸块4302远离第一齿轮4306一端厚度逐渐减小,所述延伸块4302上设有从左到右、从下到上倾斜的斜面4318,所述延伸块4302远离第一齿轮4306一端面设有形状为三角形的分离块4319;所述第一齿条4305和第二齿条4313远离第一齿条4305一端分别设有第一磁铁4322和第二磁铁4323,靠近所述第一磁铁和第二磁铁另一侧的第一齿条4305和第二齿条4313内设有与第一磁铁和第二磁铁吸合的第三磁铁4324。
21.第一软磁条和第二软磁条不易上下吸合并且分离瞬间阻力大,不便于使用;第一软磁条和第二软磁条离开延伸块时,间隔距离将逐渐减小,慢慢吸合吸附在一起,避免了设置厚度过大时,第一软磁条和第二软磁条不易上下吸合并且分离瞬间阻力大,不便于使用的问题,并且延伸块一侧具有分离块,便有对吸合在一起的第一软磁条和第二软磁条分离,分离阻力更小,利于与第一软磁条和第二软磁条配合使用;第一磁铁和第二磁铁的设置,其中左右两侧第一齿条和第二齿条向中部移动吸合时,可通过第一磁铁和第二磁铁吸合,避免了左右两侧第一齿条和第二齿条向中部移动闭合时,物品存在从左右两侧第一齿条和第二齿条对接处掉落的问题;上述第一输送带、第二输送带、摄像头、吸附头、第一旋转台、第一电机、第二电机和第三电机均为市面上可以购得的产品,结构已为公知,可以根据生产需要选购相应型号,在此不予赘述;移动平台可以为三轴移动平台,可以为专利号:cn202120282434.0一种方便清理激光切割头的激光切割机中的移动方式和旋转方法,或替换为现有其它实现功能的装置;第三机械臂和第四机械臂也可以为与第一机械臂相同结构,或者为专利号:cn202020399732.3一种可靠的机械臂物料搬运装置中的机械臂,其均为现有常规技术,在此不予赘述。
22.实施例二是一种基于同一发明构思的自动化包装方法,包括以下步骤:步骤1:第一输送带将装配的物品输入,通过第一旋转台将夹持部旋转到第一输送带上方,完成后再通过第二驱动装置驱动第一转杆和第二转杆展开,完成后再通过第四驱动装置驱动驱动缸体向下摆动,驱动缸体底部的夹持部将垂直朝下,驱动缸体再驱动连接部向下移动,横轴两侧的夹持部通过第六驱动装置调整至物品横轴宽度;步骤2:顶压装置通过内置推杆带动吸盘向下移动,吸盘带动外壳套设在物品外侧,完成后,外部顶压装置上升将物品顶起,同时,顶压装置随着外部顶压装置上升而向上移动,完成后物品将位于齿条上方;步骤3;第一电机驱动第一齿轮旋转,第一齿轮旋转带动第一齿条向第一夹持装置中心位置移动,两侧方向的第一齿条移动到物品下方时,外部顶压装置将向下退出,物品将置于第一齿面上,第一支撑部件为两面第一齿面之间的位置进行支撑,通过两个第一齿条将物品托起,夹持部通过五个驱动装置调整方向后,再通过第二旋转台旋转180度,由于外壳内置纵侧板和顶板延伸块和第二延伸部对物品横向外侧和顶端贴合进行包围,顶压装置向下移动外壳内置物品底端面将贴合在第一齿面上,第六驱动装置驱动夹持部张开,顶压装置带动外壳上升,使外壳底端两端与第一夹块平行,第六驱动装置再驱动夹持部内置延伸块对外壳横向两侧进行夹持,完成后移动平台带动螺纹柱移动到外壳圆形开孔上方,移动平台驱动螺纹柱与圆形开孔旋合固定,第六驱动装置驱动夹持部张开;步骤4:顶压装置底部的吸盘通过外部气动系统与外壳分离,完成后移动平台直接通过螺纹柱带动外壳移动,移动平台可带动物品输送较远的距离,移动到第二机械臂对接位置时,第二机械臂内置第六驱动装置驱动夹持部张开,待外壳进入第一夹块内部时,顶压装置向上驱动带动吸盘与外壳吸合,第六驱动装置驱动夹持部对外壳横向两侧夹紧,移动平台逆向旋转与外壳分离;步骤5:再通过第一夹持装置内置第一齿轮驱动第一齿条再对外壳包围,第二机械臂再带动内置夹持部逆向旋转180度,第二输送带将物品盒输入,通过定位装置时,定位装置向前移动对物品盒进行定位,完成后第二机械臂通过内置第一旋转台旋转到第二输送带物品盒上方,再通过各个驱动装置和调整方向后,将插入物品盒内,完成后内置齿轮旋转带动第一齿条向横向两侧展开分离,内置变形物品将下落到物品盒内指定包装位置处,物品盒内置托板对物品底部和横向外围进行包围;步骤6:再通过第二输送带输送经过第三机械臂时,第三机械臂将外部输入的物品内部端盖固定盖合在物品盒内置托板上,再将物品盒顶端盖子盖合密封在物品盒顶部,再通过第二输送带输送到尾部时,通过第四机械臂上对物品盒进行抓取码垛;利于对变形物品进行装夹,可保持变形物品装配状态,防止变形物品输送过程中走走停停散开变形。在步骤3中,第二电机将同时带动第二齿轮旋转,第二齿轮旋转带动第二齿条向下移动,通过第三导向块弯折从底部输出,同时,第三齿轮将带同步带动齿条向一侧移动,第二齿条移动速度将控制与第一齿条移动速度相同,第一齿条和第二齿条将同时从延伸块输出向中部位置移动,输出的第一齿条上的和第二齿条第一软磁条和第二齿条上的第二软磁条吸合,完成后同时向中间位置移动,上下两个齿条通过软磁条吸合,不使用气缸对第一齿轮底端支撑,占用空间更小,利于第二机械爪伸入包装内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1