基于视觉处理的电力吊装作业用安全边界搭建装置的制作方法
1.本发明涉及电力施工技术领域,具体地说,涉及一种基于视觉处理的电力吊装作业用安全边界搭建装置。
背景技术:
2.在如变电站(所)改扩建工程等电力施工中,其施工过程须在多种电力设备运行的条件下进行;故在该类施工中,安全管理的重点是加强对施工现场临近带电体的监督管理。
3.在该类改扩建工程中,要求操作区域与带电体需达到足够的安全距离。但在实际施工中,普遍存在安全边界难以确定的问题;主要原因在于,目前实际施工中,安全距离的确定均是通过人工采用如皮尺等工具点对点的测量获取,但安全边界线为一条线,该种测定方法,难以保证直线上的每个点均能够与带电体保持足够的安全距离。
4.此外,目前的施工过程中,在确定安全边界线后,通常是通过设置围栏实现对安全边界的标识,该种方式难以实现对越界操作的主动检测及警报,尤其是在高空作业中,更是难以判定当前操作是否越界。
技术实现要素:
5.本发明提供了一种基于视觉处理的电力吊装作业用安全边界搭建装置,其能够克服现有电力施工过程中难以划定安全边界的问题。
6.根据本发明的一种基于视觉处理的电力吊装作业用安全边界搭建装置,其包括支架,支架包括在水平面上可转动设置的安装架,安装架具有位于下部的底层安装盘和位于上部的顶层安装盘,底层安装盘和顶层安装盘相对固定设置;顶层安装盘具有水平设置的顶层安装面,顶层安装面处设置图像采集机构和测距机构,测距机构的测距方向与图像采集机构的光轴方向平行;图像采集机构用于对环境图像进行采集,测距机构用于采集其与其测距方向上的物体的间距进行测量;底层安装盘处设置有在竖直面上可转动的光源安装架,光源安装架具有与其旋转轴线平行的光源安装面,光源安装面处设置第一直线光源和第二直线光源,第一直线光源和第二直线光源之间形成夹角;第一直线光源和第二直线光源用于在地面形成投影光斑。
7.通过上述方案,能够较佳地以支架作为测量点,实现对相邻带电体的识别以及与测量点间间距的测量,基于该参数能够较佳地实现对测量点与相邻带电体连线间的间距的获取,之后基于该垂直间距,能够较佳地通过调节第一直线光源和第二直线光源的角度,实现在地面上形成2个投影光斑,该个投影光斑的连线即可较佳地作为安全边界线。
8.作为优选,安装架处设置处理器,处理器具有识别单元、计算单元和控制单元;识别单元用于对图像采集机构所采集的环境图像中的带电体进行识别,测距机构具有测量基准点且用于在识别单元识别到带电体时采集带电体与测量基准点间的间距;计算单元用于依据在所识别出的第一个和第二个带电体处的图像采集机构的对应旋转角度以及对应间距,对第一直线光源和第二直线光源在水平面和竖直面上的旋转角
度进行计算;控制单元,用于实现对图像采集机构、识别单元、测距机构、第一直线光源、第二直线光源以及计算单元的运行进行控制。
9.故而能够较佳地实现相关数据的自动处理。
10.作为优选,光源安装架的旋转轴线与测量基准点在同一竖直面上。故而能够较佳地降低测量误差。
11.作为优选,第一直线光源用于产生第一光射线,第二直线光源用于产生第二光射线,第一光射线与测距机构的测距方向在同一竖直面上,第一光射线和第二光射线间形成夹角。故而能够较佳地实现角度基准的对齐。
12.作为优选,安装架可转动地与一支撑架进行配合,支撑架处固定设置第一驱动机构,第一驱动机构用于带动安装架转动。故而能够较佳地实现安装架的可转动设置。
13.作为优选,支撑架具有增高杆和设于增高杆上部的支撑架安装部,支撑架安装部具有用于与增高杆配合的安装部底板和用于与安装架配合的安装部顶板;安装部底板与安装部顶板间形成用于设置第一驱动机构的第一驱动机构安装腔,安装部顶板中部形成配合通孔,底层安装盘对应配合通孔处形成用于与第一驱动机构动力联接的联接部。故而能够较佳地实现第一驱动机构的安装。
14.作为优选,配合通孔外周形成定位圆槽,底层安装盘对应定位圆槽处形成用于与定位圆槽间隙配合的定位圆环。故而使得定位圆槽与定位圆环间能够形成较佳地配合。
15.作为优选,第一驱动机构采用步进电机,第一驱动机构处设置角度传感器。故而能够较佳地实现角度数据的采集。
16.作为优选,底层安装盘处形成铰接架,光源安装架处形成用于与铰接架可转动配合的铰接轴,铰接轴的中轴线构成光源安装架的旋转轴线。故而能够较佳地形成底层安装盘的可转动连接。
17.作为优选,底层安装盘对应铰接架处形成缺口部。故而能够较佳地不对光源安装架处所设置的第一直线光源和第二直线光源形成遮挡。
附图说明
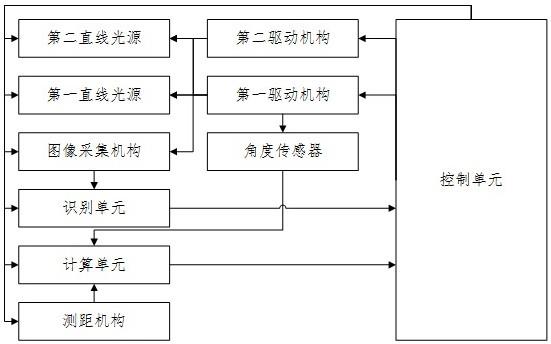
18.图1为实施例1中的安全边界搭建系统的框图示意图;图2为实施例1中的安全边界搭建方法的流程示意图;图3为实施例1中的计算单元的计算原理示意图之一;图4为实施例1中的计算单元的计算原理示意图之一;图5为实施例1中的计算单元的计算原理示意图之一;图6为实施例2中的全边界搭建装置的结构示意图;图7为实施例2中的安装架与支撑架配合示意图;图8为实施例2中的支撑架的结构示意图;图9为实施例2中的安装架的结构示意图;图10为实施例2中的光源安装架的结构示意图。
具体实施方式
19.为进一步了解本发明的内容,结合附图和实施例对本发明作详细描述。应当理解的是,实施例仅仅是对本发明进行解释而并非限定。
20.实施例1结合图1所示,本实施例提供了一种基于视觉处理的电力吊装作业用安全边界搭建系统,其具有:图像采集机构,其能够在水平面上进行转动并用于持续采集环境图像;识别单元,其用于对图像采集机构所采集的环境图像中的带电体进行识别;测距机构,其具有测量基准点且测距方向与图像采集机构的光轴方向始终平行,其用于在识别单元识别到带电体时采集带电体与测量基准点间的间距;第一直线光源和第二直线光源,第一直线光源用于产生第一光射线,第二直线光源用于产生第二光射线,第一直线光源和第二直线光源能够在竖直面上进行同步旋转,第一光射线与测距机构的测距方向在同一竖直面上,第一光射线和第二光射线间形成夹角,第一光射线和第二光射线所成的平面与第一直线光源和第二直线光源的旋转轴线平行;计算单元,其用于依据在所识别出的第一个和第二个带电体处的图像采集机构的对应旋转角度以及对应间距,对第一直线光源和第二直线光源在水平面和竖直面上的旋转角度进行计算;以及控制单元,其用于实现对图像采集机构、识别单元、测距机构、第一直线光源、第二直线光源以及计算单元的运行进行控制。
21.通过上述系统使得,能够基于图像采集机构和识别单元识别出相邻近的两个带电体,并能够获取所识别出的第一个和第二个带电体处的图像采集机构的对应旋转角度以及对应间距,通过计算单元能够较佳地计算出第一直线光源和第二直线光源在水平面和竖直面上的旋转角度,之后通过控制第一直线光源和第二直线光源运行,即可较佳地在地面处形成两处光斑,该两处光斑的连线即可较佳地作为安全边界线,故而能够较佳地实现安全边界的搭建。
22.其中,通过控制第一光射线与测距机构的测距方向在同一竖直面上,故而能够较佳地采用在第一光射线所在的竖直平面上进行计算,故而能够较佳地实现对安全距离的控制;通过控制第一光射线和第二光射线所成的平面与第一直线光源和第二直线光源的旋转轴线平行,能够较佳地实现所需安全边界线的建立。
23.本实施例中,测距机构能够包括激光测距仪,第一直线光源和第二直线光源能够包括激光发生器,图像采集机构能够包括摄像头,控制单元和计算单元能够基于单片机实现。
24.本实施例中,第一直线光源和第二直线光源的旋转轴线与测量基准点在同一竖直面上。故而能够较佳地降低计算误差。
25.本实施例中,图像采集机构、测距机构、第一直线光源和第二直线光源相对固定设置且均通过一第一驱动机构在水平面上同步带动旋转。故而使得其能够具备相同的初始角度,从而能够较佳地简化计算。
26.其中,第一驱动机构能够采用步进电机,故而能够较佳地实现角度的精准控制。
27.本实施例中,第一驱动机构处设置角度传感器,角度传感器用于对第一驱动机构
的旋转角度进行采集。故而能够较佳地实现角度数据的采集。
28.本实施例中,第一直线光源和第二直线光源相对固定设置且通过一第二驱动机构在竖直面上同步带动旋转。故而能够较佳地保持第一直线光源和第二直线光源的同步运行。
29.其中,第二驱动机构能够采用步进电机,故而能够较佳地实现角度的精准控制。
30.本实施例中,识别单元基于图像识别算法对环境图像中的带电体进行识别。故而能够较佳地实现相关数据的处理。
31.本实施例中的系统设置于一支架10处。故而能够较佳地实现系统的集成。
32.结合图2所示,基于本实施例中的系统,本实施例还提供了一种基于视觉处理的电力吊装作业用安全边界搭建方法,其包括如下步骤:步骤s1、控制图像采集机构旋转并持续采集环境图像;步骤s2、通过识别单元对环境图像中出现的带电体进行识别,识别单元所识别的第一个和第二个带电体分别记为第一带电体和第二带电体;步骤s3、在识别到第一带电体和第二带电体时,采集当前的旋转角度并分别记为第一偏转角度和第二偏转角度,并通过测距机构获取对应的第一间距和第二间距;步骤s4、控制图像采集机构旋转至角度处,步骤s5、控制第一直线光源和第二直线光源旋转至角度处,角度处,其中,为设定安全间距,为第一直线光源和第二直线光源的旋转轴线与地面的间距;步骤s6、控制第一直线光源和第二直线光源工作,以第一直线光源和第二直线光源在地面的投影光斑的连线作为安全边界线。
33.通过上述步骤s1-s6,能够较佳地自动计算出检测点(即整个系统所在的位置)与相邻两个带电体连线间的垂直距离,故无需人工测量,且能够较佳地保证测量的精度;基于该垂直距离,能够较佳地引入安全距离并通过第一直线光源和第二直线光源在地面形成两个光斑,该两个光斑的连线即可较佳地作为安全边界线,故而能够较佳地实现安全边界的
建立。
34.结合图3所示:在步骤s1中,在进行测量之初,能够首先将整套系统(实际上整套系统设置于一装置处,故能够较佳地随地设置)设置于施工区域处,此时图像采集机构、第一直线光源和第二直线光源能够具备一个初始的、相同的在水平面上的初始角度;之后,能够控制图像采集机构以该初始角度作为0
°
进行旋转,在旋转过程中能够持续采集环境图像;具体地,能够每旋转一个角度则拍摄对应的环境图像;在步骤s2中,在环境图像的采集过程中,在每完成一次环境图像的拍摄后,均通过识别单元识别图像中心是否存在带电体,进而完成第一带电体和第二带电体的识别;并获取与第一带电体和第二带电体相对应的第一偏转角度和第二偏转角度以及第一间距和第二间距;图3中,第一偏转角度为∠bac,第二偏转角度为∠bad,第一间距为线段ac的长度,第二间距为线段ad的长度;在步骤s3中,通过计算单元计算获取第一直线光源和第二直线光源在水平面所需旋转的角度和在竖直面所需旋转的角度;图3中,角度即为∠bae,角度即为∠eaf;在步骤s4中,结合图4所示,计算单元能够在水平面上进行计算,进而获取∠acd的角度,之后即可较佳地获取角度,其中,同时,能够获取测量点至第一带电体和第二带电体连线间垂直距离l,及线段ae的长度;在步骤s5中,结合图5所示,计算单元能够在过线段ae的竖直面上对角度进行计算;在图5中,安全间距d即为线段fg的长度,线段og的长度等于l,线段om的长度即为第一直线光源和第二直线光源的旋转轴线与地面的间距h;在步骤s6中,即可较佳地控制第一直线光源和第二直线光源工作,进而在地面处形成光斑f和光斑h,光斑f和光斑h的连线即为安全边界线。
35.在上述过程中,由于图像采集机构、测距机构、第一直线光源和第二直线光源相对固定设置且均通过一第一驱动机构在水平面上同步带动旋转,故而使得其能够具备相同的初始角度,故而能够较佳地简化计算。
36.在上述过程中,通过控制第一光射线与测距机构的测距方向在同一竖直面上,故
而能够较佳地将∠bae的角度作为角度,从而能够较佳地便于计算。
37.结合图5所示,点a为测距机构的测量基准点所在的位置,点m为第一直线光源和第二直线光源的旋转轴线所在的位置,点k为第一直线光源和第二直线光源所在的位置,故通过设置第一直线光源和第二直线光源的旋转轴线与测量基准点在同一竖直面上,能够较佳地保证计算基准的同一,故而能够较佳地降低计算误差。
38.在上述过程中,通过保证第一光射线和第二光射线所成的平面与第一直线光源和第二直线光源的旋转轴线平行,故而能够较佳地保证两个光斑的连线能够与两个带电体的连线保持平行。
39.本实施例中,设定安全间距d能够设置为如6m。
40.本实施例的步骤s1中,通过一第一驱动机构带动图像采集机构的旋转;步骤s3中,通过设于第一驱动机构处的角度传感器实现对第一驱动机构的旋转角度的采集。故而能够较佳地实现相关角度数据的获取。
41.本实施例的步骤s2中,识别单元基于图像识别算法实现对带电体的识别。故而能够较佳地借助现有的识别算法实现对带电体的识别。
42.具体地,本实施例中的图像识别算法能够采用基于yolo的目标检测算法。
43.实施例2结合图6-10所示,本实施例提供了一种基于视觉处理的电力吊装作业用安全边界搭建装置,其包括支架10,支架10处设置实施例1中的系统。
44.本实施例中的支架10包括在水平面上可转动设置的安装架11,安装架11具有位于下部的底层安装盘11a和位于上部的顶层安装盘11b,底层安装盘11a和顶层安装盘11b相对固定设置;顶层安装盘11b具有水平设置的顶层安装面11b1,顶层安装面11b1处设置图像采集机构1和测距机构2,测距机构2的测距方向与图像采集机构的光轴方向平行;图像采集机构1用于对环境图像进行采集,测距机构2用于采集其与其测距方向上的物体的间距进行测量;底层安装盘11a处设置有在竖直面上可转动的光源安装架11c,光源安装架11c具有与其旋转轴线平行的光源安装面11c1,光源安装面11c1处设置第一直线光源3和第二直线光源4,第一直线光源3和第二直线光源4之间形成夹角;第一直线光源3和第二直线光源4用于在地面形成投影光斑。
45.通过上述方案,能够较佳地以支架10作为测量点,实现对相邻带电体的识别以及与测量点间间距的测量,基于该参数能够较佳地实现对测量点与相邻带电体连线间的间距的获取,之后基于该垂直间距,能够较佳地通过调节第一直线光源3和第二直线光源4的角度,实现在地面上形成2个投影光斑,该2个投影光斑的连线即可较佳地作为安全边界线。
46.基于此种方法所绘制的安全边界线,能够较佳地与对应相邻带电体的连线相互平行,也即能够较佳地保证安全距离。
47.安装架11处设置处理器5,处理器5具有识别单元、计算单元和控制单元;识别单元用于对图像采集机构所采集的环境图像中的带电体进行识别,测距机构具有测量基准点且用于在识别单元识别到带电体时采集带电体与测量基准点间的间距;
计算单元用于依据在所识别出的第一个和第二个带电体处的图像采集机构的对应旋转角度以及对应间距,对第一直线光源和第二直线光源在水平面和竖直面上的旋转角度进行计算;控制单元,用于实现对图像采集机构、识别单元、测距机构、第一直线光源、第二直线光源以及计算单元的运行进行控制。
48.故而能够较佳地实现相关数据的自动处理。
49.光源安装架11c的旋转轴线与测量基准点在同一竖直面上。故而能够较佳地降低测量误差。
50.第一直线光源3用于产生第一光射线,第二直线光源4于产生第二光射线,第一光射线与测距机构2的测距方向在同一竖直面上,第一光射线和第二光射线间形成夹角。故而能够较佳地实现角度基准的对齐。
51.安装架11可转动地与一支撑架12进行配合,支撑架12处固定设置第一驱动机构6,第一驱动机构6用于带动安装架11转动。故而能够较佳地实现安装架11的可转动设置。
52.支撑架12具有增高杆12a和设于增高杆12a上部的支撑架安装部12b,支撑架安装部12b具有用于与增高杆12a配合的安装部底板12b1和用于与安装架11配合的安装部顶板12b2;安装部底板12b1与安装部顶板12b2间形成用于设置第一驱动机构6的第一驱动机构安装腔12b3,安装部顶板12b2中部形成配合通孔12b4,底层安装盘11a对应配合通孔12b4处形成用于与第一驱动机构6动力联接的联接部11a1。故而能够较佳地实现第一驱动机构6的安装。
53.配合通孔12b4外周形成定位圆槽12b5,底层安装盘11a对应定位圆槽12b5处形成用于与定位圆槽12b5间隙配合的定位圆环11a2。故而使得定位圆槽12b5与定位圆环11a2间能够形成较佳地配合。
54.第一驱动机构6采用步进电机,第一驱动机构6处设置角度传感器。故而能够较佳地实现角度数据的采集。
55.底层安装盘11a处形成铰接架11a3,光源安装架11c处形成用于与铰接架11a3可转动配合的铰接轴11c1,铰接轴11c1的中轴线构成光源安装架11c的旋转轴线。故而能够较佳地形成底层安装盘11a的可转动连接。
56.底层安装盘11a对应铰接架11a3处形成缺口部11a4。故而能够较佳地不对光源安装架11c处所设置的第一直线光源3和第二直线光源4形成遮挡。
57.铰接轴11c1与一第二驱动机构7动力联接,第二驱动机构7采用步进电机。故而能够较佳地实现对底层安装盘11a的旋转控制。
58.支撑架12下部设有一支脚13处。故而便于部署。
59.本实施例中,测距机构能够包括激光测距仪,第一直线光源和第二直线光源能够包括激光发生器,图像采集机构能够包括摄像头,处理器能够基于单片机实现。
60.以上示意性的对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1