一种扶手分段同步的安全式自动扶梯的制作方法
1.本发明涉及自动扶梯技术领域,尤其是一种扶手分段同步的安全式自动扶梯。
背景技术:
2.乘客输送装置有自动扶梯、自动人行道等,当自动扶梯的提升高度增大或载荷增加情况下,对应的驱动装置、链条等构成部件大型化,或者使用特殊部件,但是制动装置不会随着乘客运输装置的提升高度增大或载荷的增加而增加。目前制动装置只有在乘客运输装置上部设置,当制动装置失效或链条断裂时,必定会造成运输装置逆转或加速运行,进而造成人员伤亡或财产损失。乘客运输装置高度越高或长度越长,扶手带传送设备的摩擦力越大,目前扶手带动力源普遍设置在设备的上端部,单靠乘客传输装置一端驱动十分困难并存在与主传送装置不同步风险。在专利文献cn_215666534_u中,公开了一种安全型自动扶梯,同时此发明具备各段具有独立驱动的扶手模块,可以让一部乘客运输装置根据实际情况分段分流乘客,运输装置的同步性确保乘客不会聚集,但是各个独立驱动的扶手模块导致了新的技术问题,各个独立驱动间需要保持高度一致的同步性,当扶手带分段过多或提升高度过高时,会大幅增加安装难度及设备成本,同时扶手带与梯级同步不可控,此外目前自动扶梯或自动人行道制动装置普遍在乘客运输装置上部设置,自动扶梯或自动人行道提升高度到达一定高度以后,制动装置数量及位置固定不再变化,当制动装置失效或链条断裂时,集中制动效果并不太好,必定会造成运输装置逆转或加速运行。
技术实现要素:
3.本发明解决了扶手分段安装独立驱动同步性差制动效果差的问题,提出一种扶手分段同步的安全式自动扶梯,通过对设备分散驱动及制动,使输送装置上的乘客安全分段分流、使遇到突发紧急情况时能够分段制动让乘客更安全、使进一步一梯多用降低成本方便施工。
4.为实现上述目的,提出以下技术方案:
5.一种扶手分段同步的安全式自动扶梯,包括扶梯主体,所述扶梯主体两侧设有若干分段的扶手带,所述扶梯主体设有主驱动部和链条,每个所述扶手带对应设有至少一个拖动装置,所述主驱动部通过链条带动拖动装置转动,所述拖动装置带动扶手带转动,所述拖动装置设有制动结构,所述制动结构用于锁紧拖动装置。
6.本发明的扶手带为一段或多段,呈现环状运动轨迹;本发明链条设有双边并呈环状地连结,以链条作为动能传递介质,主驱动部带动拖动装置同步转动,拖动装置同时带动扶手带转动,而梯级作用在链条上,并与链条轨迹呈现环状运行,实现梯级与扶手带同步转动,在自动扶梯或人行道遇见提升高度较高或水平跨度较大时,需要多部扶梯运输乘客时,本发明的扶手带分段设置实现,可使一部扶梯或人行道实现多部扶梯的功能,提高乘客乘坐扶梯的输送效率。同时本发明的拖动装置设有制动结构,当手扶梯断电或发生链条断裂的情况下会对拖动装置进行紧急制动,实现梯级和扶手带同时制动,保证乘客的安全性。主
驱动部设有一个或两个驱动马达,其使所述链条循环移动。
7.作为优选,所述拖动装置设有轴体,所述轴体两端对称设有驱动轮和驱动齿盘,所述驱动轮和驱动齿盘同轴固定在轴体的一端,所述制动结构用于锁紧驱动齿盘,所述驱动轮用于拖动扶手带,所述驱动齿盘用于与链条传动连接。
8.作为优选,所述制动结构包括固定设置在轴体上的动力构件和刹车构件,所述动力构件设有联杆,所述联杆对刹车构件进行限位,所述刹车构件包括左右对称的抱紧箍,所述抱紧箍的下部连接有第一螺栓和第二螺栓,所述抱紧箍的上部连接有第三螺栓,所述抱紧箍通过第一螺栓转动连接于轴体上,所述第二螺栓和抱紧箍外壁之间及第三螺栓和抱紧箍外壁止之间套设有弹簧,所述驱动齿盘设有制动力作用轴,所述抱紧箍用于抱紧制动力作用轴,所述联杆末端设有锥台,所述抱紧箍对应锥台的位置上设有锥槽,所述联杆滑动连接于锥槽内,所述抱紧箍的上部设有连接滑槽,所述连接滑槽内设有连接抱紧箍和轴体的第四螺栓。
9.作为优选,所述动力构件包括导套,所述导套内设有隔磁环,所述隔磁环两侧对称设有复位弹簧,所述复位弹簧连接有永磁体,所述导套内设有滑动轴承,所述永磁体套设在滑动轴承内,所述导套的外侧上围绕永磁体四周设有线圈,所述联杆与永磁体的一端固定连接,所述导套靠近联杆一侧设有挡片。
10.作为优选,所述制动力作用轴靠近轴体的一端设有挡台,所述抱紧箍设置在挡台和驱动齿盘的端面之间。
11.作为优选,所述驱动齿盘和驱动轮分体设置,所述驱动齿盘和驱动轮同轴设有贯穿的、直径相同的圆槽,所述轴体末端设有若干螺纹孔,所述轴体一端依次穿过驱动齿盘和驱动轮,驱动轮外侧设有固定挡块,所述固定挡块对应螺纹孔设有若干通孔,所述通孔上设有若干锁紧螺杆与螺纹孔螺纹连接。
12.本发明分体设置的目的是方便实际安装时对两侧的驱动齿盘的初始位置进行调试。同时若驱动齿盘发生崩齿,本发明的分体设置能够方便驱动齿盘的拆卸维修。
13.作为优选,所述扶梯主体上设有用于检测扶手带速度的第二测速传感器、用于检测主驱动部输出速度的第一测速传感器和主控单元,所述主控单元与第一测速传感器、第二测速传感器和制动结构电连接。本发明的主控单元控制驱动马达的运转/停止及控制拖动装置的辅助制动;所述拖动装置和制动结构是根据扶手带分段或扶手带的长度增加或减少;所述拖动装置和制动结构可以反向制动驱动链条运动。
14.作为优选,所述主控单元设有以下控制逻辑:
15.s1,主控单元判断主驱动部和拖动装置是否全部处于正常状态,若是,进行s2,若否,反馈设备异常;
16.s2,第一测速传感器检测主驱动部的输出速度,第二测速传感器检测检测扶手带的运行速度;
17.s3,主控单元判断主驱动部的输出速度和检测检测扶手带的运行速度是否均在设定的目标阈值范围内,若是,返回s2;若否,主控单元控制制动结构进行锁紧操作,并反馈设备异常。
18.本发明的有益效果是:根据链条同时驱动多个拖动装置和制动结构,进一步使扶手带同步运行;根据多个拖动装置和制动结构制动时对链条的反作用力,进一步分段分散
链条的制动力,遇到突发风险进一步防止扶梯的加速下行或逆转,增加扶梯安全可靠性;根据不同的扶手带分段出口位置,进一步实现乘客根据实际需求进行出入,进一步提高设备利用率,减少多设备的成本;根据多个拖动装置和制动结构的分散布局,进一步减少传统设备上部设备空间,进一步减少设备的安装制造难度。
附图说明
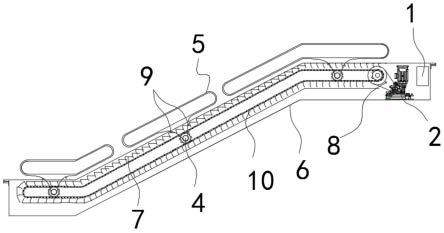
19.图1是实施例整体构成简图;
20.图2是实施例拖动装置局部装配示意图;
21.图3是实施例拖动装置和制动结构装配图;
22.图4是实施例制动结构的爆炸视图;
23.图5是实施例驱动齿盘的结构示意图;
24.图6是实施例抱紧箍的结构示意图;
25.图7是实施例动力构件的剖视图;
26.图8是实施例主控单元的控制流程图;
27.其中:1、主控单元2、主驱动部4、拖动装置5、扶手带6、扶梯主体7、梯级8、第一测速传感器9、第二测速传感器10、链条21、第四螺栓22、连接滑槽23、第一螺栓24、第二螺栓25、第三螺栓28、锥槽31、锥台32、滑动轴承33、挡片34、复位弹簧35、导套36、线圈37、隔磁环38、永磁体39、联杆420、驱动轮421、制动力作用轴422、驱动齿盘423、刹车构件430、动力构件。
具体实施方式
28.实施例:
29.本实施例提出一种扶手分段同步的安全式自动扶梯,参考图1和图2包括扶梯主体6,扶梯主体6两侧设有若干分段的扶手带5,扶梯主体6设有主驱动部2和链条10,每个扶手带5对应设有至少一个拖动装置4,主驱动部2通过链条10带动拖动装置4转动,拖动装置4带动扶手带5转动,拖动装置4设有制动结构,制动结构用于锁紧拖动装置4。扶梯主体6上设有用于检测扶手带5速度的第二测速传感器9、用于检测主驱动部2输出速度的第一测速传感器8和主控单元1,主控单元1与第一测速传感器8、第二测速传感器9和制动结构电连接。第一测速传感器8、第二测速传感器9的具体结构在专利文献cn_215666534_u已经披露,作为现有技术,本实施例不再阐述。
30.本发明的扶手带5为一段或多段,呈现环状运动轨迹;本发明链条10设有双边并呈环状地连结,以链条10作为动能传递介质,主驱动部2带动拖动装置4同步转动,拖动装置4同时带动扶手带5转动,而梯级7作用在链条上,并与链条轨迹呈现环状运行,实现梯级7与扶手带5同步转动,在自动扶梯或人行道遇见提升高度较高或水平跨度较大时,需要多部扶梯运输乘客时,本发明的扶手带5分段设置实现,可使一部扶梯或人行道实现多部扶梯的功能,提高乘客乘坐扶梯的输送效率。同时本发明的拖动装置4设有制动结构,当手扶梯断电或发生链条断裂的情况下会对拖动装置4进行紧急制动,实现梯级和扶手带5同时制动,保证乘客的安全性。主驱动部2设有一个或两个驱动马达,其使链条循环移动。
31.参考图3和图4,拖动装置4设有轴体,轴体两端对称设有驱动轮420和驱动齿盘422,驱动轮420和驱动齿盘422同轴固定在轴体的一端,制动结构用于锁紧驱动齿盘422,驱
动轮420用于拖动扶手带5,驱动齿盘422用于与链条10传动连接。驱动齿盘422和驱动轮420分体设置,驱动齿盘422和驱动轮420同轴设有贯穿的、直径相同的圆槽,轴体末端设有若干螺纹孔,轴体一端依次穿过驱动齿盘422和驱动轮420,驱动轮420外侧设有固定挡块,固定挡块对应螺纹孔设有若干通孔,通孔上设有若干锁紧螺杆与螺纹孔螺纹连接。制动结构包括固定设置在轴体上的动力构件430和刹车构件423,动力构件430设有联杆39,联杆39对刹车构件423进行限位,参考图6,刹车构件423包括左右对称的抱紧箍,参考图4,抱紧箍的下部连接有第一螺栓23和第二螺栓24,抱紧箍的上部连接有第三螺栓25,抱紧箍通过第一螺栓23转动连接于轴体上,第二螺栓24和抱紧箍外壁之间及第三螺栓25和抱紧箍外壁止之间套设有弹簧,参考图5,驱动齿盘422设有制动力作用轴421,抱紧箍用于抱紧制动力作用轴421,联杆39末端设有锥台31,抱紧箍对应锥台31的位置上设有锥槽28,联杆39滑动连接于锥槽28内,抱紧箍的上部设有连接滑槽22,连接滑槽22内设有连接抱紧箍和轴体的第四螺栓21。制动力作用轴421靠近轴体的一端设有挡台27,抱紧箍设置在挡台27和驱动齿盘422的端面之间。
32.参考图7,动力构件430包括导套35,导套35内设有隔磁环37,隔磁环37两侧对称设有复位弹簧34,复位弹簧34连接有永磁体38,导套35内设有滑动轴承32,永磁体38套设在滑动轴承32内,导套35的外侧上围绕永磁体38四周设有线圈36,联杆39与永磁体38的一端固定连接,导套35靠近联杆39一侧设有挡片33。
33.本发明分体设置的目的是方便实际安装时对两侧的驱动齿盘422的初始位置进行调试。同时若驱动齿盘422发生崩齿,本发明的分体设置能够方便驱动齿盘422的拆卸维修。
34.本实施例的工作过程如下:主控单元1执行控制命令,主控单元1分别控制打开制动结构,此时线圈36通电,联杆收缩,使锥台31收进锥槽28,此时抱紧箍打开,当拖动装置正常时,会执行到驱动马达制动装置,直至所有拖动装置均正常运行。当需要进行制动时,线圈36断电,联杆在复位弹簧作用下伸展,使锥台31离开锥槽28,由于联杆直径小于锥槽28的最小直径,抱紧箍外侧的弹簧复位,使得抱紧箍紧紧抱住制动力作用轴421使得驱动齿盘停止转动。
35.本发明根据链条同时驱动多个拖动装置和制动结构,进一步使扶手带同步运行;根据多个拖动装置和制动结构制动时对链条的反作用力,进一步分段分散链条的制动力,遇到突发风险进一步防止扶梯的加速下行或逆转,增加扶梯安全可靠性;根据不同的扶手带分段出口位置,进一步实现乘客根据实际需求进行出入,进一步提高设备利用率,减少多设备的成本;根据多个拖动装置和制动结构的分散布局,进一步减少传统设备上部设备空间,进一步减少设备的安装制造难度。
36.参考图8,所述主控单元1设有以下控制逻辑:
37.s1,主控单元1判断主驱动部2和拖动装置4是否全部处于正常状态,若是,进行s2,若否,反馈设备异常;
38.s2,第一测速传感器8检测主驱动部2的输出速度,第二测速传感器9检测检测扶手带5的运行速度;
39.s3,主控单元1判断主驱动部2的输出速度和检测检测扶手带5的运行速度是否均在设定的目标阈值范围内,若是,返回s2;若否,主控单元1控制制动结构进行锁紧操作,并反馈设备异常。在本实施例中锁紧操作为对电磁铁进行断电,即对线圈进行断电。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1