一种塔式起重机运行安全预警系统的制作方法
1.本发明涉及塔式起重机监控领域,特别是涉及一种塔式起重机运行安全预警系统。
背景技术:
2.塔式起重机又称塔吊,是建筑工地上最常用的一种起重设备,用来起吊钢筋、混凝土和钢管等施工原材料,随着施工工地越来越多,塔吊的数量也越来越多,有时一个工地会有好多塔吊,好多塔吊在同时作业时存在交叉重叠作业,而现在是靠指挥员在地面指挥操作员进行吊装作业,这种操作方式对人的综合素质要求严格,需要指挥员与操作员建立统一关系、密切配合才可完成吊装作业,操控流程复杂,人力成本高,另外,人为操作或指挥失误容易引发安全事故,比如塔吊之间碰撞,而且经常发生在作业时塔吊倾倒造成人员伤亡的现象,所以为避免塔吊机群在交叉重叠区域进行吊装作业时发生碰撞事故且避免塔吊倾倒造成人员伤亡,需要一种能实时监控塔吊运行状态的安全预警系统。
技术实现要素:
3.本发明的目的是提供一种塔式起重机运行安全预警系统,可以同时对塔吊的倾斜和塔吊间的碰撞进行预警。
4.为实现上述目的,本发明提供了如下方案:
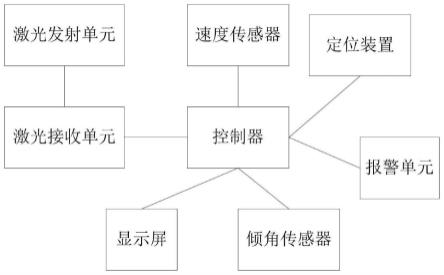
5.一种塔式起重机运行安全预警系统,包括:控制器、激光发射单元和均与所述控制器连接的速度传感器、定位装置、报警单元、显示屏和激光接收单元;
6.所述速度传感器和所述定位装置设置在塔式起重机的动臂上,所述激光发射单元设置在所述塔式起重机独立塔身的顶部标准节中心,所述激光接收单元设置在所述塔式起重机的底部中心,所述激光接收单元用于接收所述激光发射单元发射的激光信号,当所述塔式起重机没有倾斜或者倾斜角度不超过设定阈值时,所述激光接收单元可以接收到所述激光发射单元发射的激光信号,当所述塔式起重机倾斜角度超过设定阈值时,所述激光接收单元接收不到所述激光发射单元发射的激光信号;所述激光发射单元发出的激光信号垂直于水平面;所述显示屏设置在所述塔式起重机的操作室内;
7.所述速度传感器用于测量所述动臂的运行速度,所述定位装置用于对所述动臂进行定位,所述控制器用于根据所述定位和所述运行速度控制所述报警单元报警;所述控制器还用于将所述激光接收单元接收的激光信号显示在所述显示屏。
8.可选的,所述塔式起重机运行安全预警系统,还包括:设置在所述塔式起重机的操作室门上且与所述控制器连接的位移传感器,所述位移传感器用于测量所述操作室门的位移。
9.可选的,所述塔式起重机运行安全预警系统,还包括:设置在所述塔式起重机上且与所述控制器连接的风速传感器。
10.可选的,所述塔式起重机运行安全预警系统,还包括:设置在所述动臂上且与所述
控制器连接的形变传感器。
11.可选的,所述塔式起重机运行安全预警系统,还包括:设置在所述塔式起重机的操作室门上的射频识别模块。
12.可选的,所述报警单元为声光报警器。
13.可选的,所述塔式起重机运行安全预警系统,还包括:设置在所述动臂上且与所述控制器连接的方向传感器。
14.可选的,所述塔式起重机运行安全预警系统,还包括:设置在所述动臂上且与所述控制器连接的成像装置;所述成像装置用于拍摄所述动臂在设定范围内环境的图像,所述控制器用于根据所述图像控制所述报警单元进行报警。
15.可选的,所述塔式起重机运行安全预警系统,还包括:设置在所述塔式起重机的顶部且与所述控制器连接的倾角传感器,所述控制器用于根据所述倾角传感器测量的倾角控制所述报警单元报警。
16.根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明中速度传感器和定位装置设置在塔式起重机的动臂上,控制器通过速度传感器测量的速度和定位装置的定位得到两个相邻塔式起重机的动臂到达重叠位置时的时间,判断在重叠位置会不会碰撞进行碰撞预警;激光发射单元设置在塔式起重机独立塔身的顶部标准节中心,激光接收单元设置在塔式起重机的底部中心,激光接收单元用于接收激光发射单元发射的激光信号,激光发射单元发出的激光信号垂直于水平面,控制器用于将激光接收单元接收的激光信号发送到显示屏,当塔式起重机倾斜超标时,激光接收装置无法接收到激光发射单元发射的激光,实现实时监测塔吊是否倾斜并进行预警。
附图说明
17.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
18.图1为本发明实施例提供的塔式起重机运行安全预警系统的结构框图;
19.图2为本发明实施例提供的塔式起重机运行安全预警系统的结构示意图。
20.符号说明:
21.1-激光发射单元、2-速度传感器、3-定位装置、4-倾角传感器、5-激光接收单元。
具体实施方式
22.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
24.如图1和图2所示,本实施例提供的塔式起重机运行安全预警系统,包括:控制器、
激光发射单元1和均与所述控制器连接的速度传感器2、定位装置3、报警单元、显示屏和激光接收单元5。
25.所述速度传感器2和所述定位装置3设置在塔式起重机的动臂上,所述激光发射单元1设置在所述塔式起重机独立塔身的顶部标准节中心,所述激光接收单元5设置在所述塔式起重机的底部中心,所述激光接收单元5用于接收所述激光发射单元1发射的激光信号;所述激光发射单元1发出的激光信号垂直于水平面;所述显示屏设置在所述塔式起重机的操作室内。
26.所述速度传感器2用于测量所述动臂的运行速度,所述定位装置3用于对所述动臂进行定位,所述控制器用于根据所述定位和所述运行速度控制报警单元报警;控制器还用于根据设定位置、目标动臂的定位和运行速度计算目标动臂到达设定位置的时间,根据设定位置、相邻动臂的定位和运行速度计算与相邻动臂到达设定位置的时间,相邻动臂所在的塔式起重机与目标动臂所在的塔式起重机相邻,通过比较两者到达设定位置的时间判断两个动臂是否会在设定位置发生碰撞,如果会,则发出预警信号(发出会发生碰撞的语音提示)并控制目标动臂的运行速度,使其避免碰撞。在实际应用中一般设定位置就是两个动臂作业时重叠的位置。
27.所述控制器还用于将所述激光接收单元5接收的激光信号发送到所述显示屏,当塔式起重机没有倾斜或倾斜角度不超过设定阈值时,激光接收单元可以接收到激光发射单元发出的信号;当塔式起重机倾斜超过设定阈值时,由于激光发射单元发射的激光是垂直水平面的,激光接收单元接收不到激光发射单元发射的信号,那么控制器也就无法将激光接收单元接收的激光信号发送到显示屏上,此时操作员就可以了解到显示屏上没有激光信号,此时可以判断塔式起重机倾斜超标。
28.作为一种可选的实施方式,所述塔式起重机运行安全预警系统,包括:设置在所述塔式起重机的操作室门上且与所述控制器连接的位移传感器,所述位移传感器用于测量所述操作室门的位移。本实施例的工作过程为:当位移传感器超过设定阈值时则判断门是打开的,这时如果塔式起重机的电源没有关闭控制器则控制报警单元发出门未关好的提示音。
29.作为一种可选的实施方式,所述塔式起重机运行安全预警系统,包括:设置在所述塔式起重机上且与所述控制器连接的风速传感器。本实施例的工作过程为:当停止作业后应该让动臂随风运动,若风速传感器测量到的风速达到设定范围但是速度传感器没有测量到速度那么控制器就会向管理人员的手机发送短信告知这一特殊情况。
30.作为一种可选的实施方式,所述塔式起重机运行安全预警系统,包括:设置在所述动臂上且与所述控制器连接的形变传感器。本实施例的工作过程为:当形变传感器达到设定数值时,说明吊的物品超重,所以控制器会控制报警单元发出超重的提示音。
31.作为一种可选的实施方式,所述塔式起重机运行安全预警系统,包括:设置在所述塔式起重机的操作室门上的射频识别模块,当操作员想要开门进去操作的话就需要刷卡,避免其他人员进入操作室。
32.作为一种可选的实施方式,所述报警单元为声光报警器。
33.作为一种可选的实施方式,所述塔式起重机运行安全预警系统,包括:设置在所述动臂上且与所述控制器连接的方向传感器。本实施例的工作过程为:当动臂的方向不在设
定的运动方向上时,动臂脱离设定方向运行,可能会存在倾翻的现象,那么控制器就会控制报警装置报警。
34.作为一种可选的实施方式,所述塔式起重机运行安全预警系统,包括:设置在所述动臂上且与所述控制器连接的成像装置;所述成像装置用于拍摄所述动臂在设定范围内环境的图像,所述控制器用于根据所述图像控制所述报警单元进行报警。本实施例的工作过程为:控制器根据图像判断设定范围内环境是否出现人员,当出现人员后控制器就会控制报警单元发出请勿靠近的语音对人员进行提醒。
35.作为一种可选的实施方式,所述塔式起重机运行安全预警系统,包括:设置在所述塔式起重机的顶部且与所述控制器连接的倾角传感器,所述控制器用于根据所述倾角传感器测量的倾角控制所述报警单元报警,本实施例的工作过程为:当激光接收单元没有接收到激光信号时,再联合倾角传感器测量的倾角可以更加准确地判断塔式起重机倾斜。
36.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
37.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1