电梯的导轨设置装置以及导轨设置方法与流程
1.本发明涉及用于将电梯的导轨设置在升降通道内的导轨设置装置以及导轨设置方法。
背景技术:
2.作为在电梯的升降通道内设置导轨的技术,有下述专利文献1所公开的技术。在该专利文献1中记载有如下内容:“固定于电梯轿厢架(或基准架)17的支撑机构45支撑升降通道11的建材42,连同电梯轿厢架17将框架1以钢琴线14为基准进行定位,其结果,由轨道把持机构3将固定于框架1的导轨10进行定位。”。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开平05-278968号公报
技术实现要素:
6.发明所要解决的课题
7.然而,上述的用于定位导轨的支撑机构一体地固定于电梯轿厢架,成为大型且重量大。因此,无法由一个人进行包括该支撑机构在内的导轨设置装置相对于电梯轿厢架的固定及拆除,从而作业负荷变大。
8.因此,本发明的目的在于提供导轨设置装置以及导轨设置方法,能够减轻相对于收纳在升降通道内的作业轿厢的固定及拆除的作业负荷。
9.用于解决课题的方案
10.为了解决上述课题,例如采用技术方案所记载的结构。
11.本技术包括多个解决上述课题的方案,举出其一例,一种导轨设置装置,用于对沿电梯的升降通道的内周壁中的对置的两个横壁配置的一对导轨进行位置调整,其具备:一对前壁用距离调整部件,其固定于升降自如地收纳在升降通道内的作业轿厢,调整上述升降通道的内周壁中的大致垂直于上述两个横壁的前壁与上述作业轿厢之间的第一方向的距离,从上述第一方向调整由固定于上述作业轿厢的导靴夹持的导轨的上述第一方向上的位置;以及横壁用距离调整部件,其固定于上述一对导轨中的至少一方,通过调整上述两个横壁与上述各导轨的距离,来调整上述各导轨的第二方向上的位置。
12.发明的效果如下。
13.根据本发明,能够提供能够减轻相对于收纳在升降通道内的作业轿厢的固定及拆除的作业负荷的导轨设置装置以及导轨设置方法。
附图说明
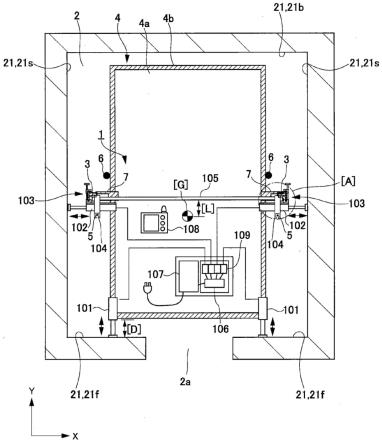
14.图1是示出实施方式的导轨设置装置的结构的俯视图。
15.图2是用于说明实施方式的导轨设置装置的设置环境的俯视图。
16.图3是示出实施方式的导轨设置装置的主要部分的放大图(其一)。
17.图4是示出实施方式的导轨设置装置的主要部分的放大图(其二)。
18.图5是示出使用了实施方式的导轨设置装置的导轨设置方法的流程图(其一)。
19.图6是示出使用了实施方式的导轨设置装置的导轨设置方法的流程图(其二)。
20.图7是说明实施方式的导轨设置方法的俯视图。
21.符号说明
22.1—导轨设置装置,2—升降通道,2a—层站开口,3—导轨,4—作业轿厢,7—导靴,21—内周壁,21f—前壁,21s—横壁,101—前壁用距离调整部件,102—横壁用距离调整部件,103—拆装机构,105—轨距。
具体实施方式
23.以下,基于附图,对应用了本发明的电梯的导轨设置装置以及导轨设置方法的实施方式详细地进行说明。其中,在以下说明的实施方式中,首先说明电梯的导轨设置装置,接着说明使用了该导轨设置装置的导轨设置方法。
24.《电梯的导轨设置装置》
25.图1是示出实施方式的导轨设置装置1的结构的俯视图。并且,图2是用于说明实施方式的导轨设置装置的设置环境的俯视图,且是安装图1所示的导轨设置装置1前的电梯的升降通道2内的图。再有,图3及图4是示出实施方式的导轨设置装置1的主要部分的放大图(其一)及(其二),且是图1的[a]部的放大图。使用上述附图说明的导轨设置装置1是用于将一对导轨3设置于电梯的升降通道2的内周壁21的装置。导轨设置装置1以在升降通道2内垂下的钢琴线5为基准来进行导轨3的定位。作业轿厢4通过绳索6悬吊。并且,在作业轿厢4固定有下述的导靴7。此处,在说明导轨设置装置1的结构之前,对导轨设置装置1的安装环境进行说明。
[0026]
[升降通道2]
[0027]
升降通道2例如是由内周壁21围起四个方向的空间。内周壁21由配置导轨3的两个对置的壁部(以下称为横壁21s)、与上述横壁21s垂直且具有层站开口2a的壁部(以下称为前壁21f)、以及与前壁21f对置的壁部(以下称为后壁21b)构成。
[0028]
[导轨3]
[0029]
导轨3是在电梯的升降通道2内沿行进方向对之后收纳在升降通道2内的电梯轿厢进行引导的钢铁制的部件,是截面呈t字型的t型钢(尤其参照图3、图4)。导轨3例如隔着上述的电梯轿厢的重心[g]沿内周壁21中的对置的两个横壁21s分别配置,并由该导轨设置装置1在从基准位置起几mm的误差范围内定位。并且,定位后的导轨3使用安装金属零件固定于内周壁21(此处为横壁21s)。导轨3的定位以及向内周壁21的固定在垂直方向的多处进行,由此导轨3垂直地竖立设置。
[0030]
在由导轨设置装置1进行定位时,这样的导轨3在使t型钢的凸缘部与横壁21s对置且使从凸缘部的中央突出的板片(
ブレード
)朝向升降通道2的中央侧的状态下配置,并临时固定于横壁21s。
[0031]
[作业轿厢4]
[0032]
作业人员在实施导轨3的设置作业时乘入作业轿厢4。这样的作业轿厢4由例如呈
四边形的作业地板4a、以及竖立设置于作业地板4a的周缘且包围四边形状的区域地配置的扶手4b构成。这样的作业轿厢4通过绳索6在升降通道2内的导轨3之间悬吊,通过绳索6的提升驱动而在升降通道2内行进自如。在由绳索6悬吊的状态下,作业轿厢4形成为扶手4b与升降通道2的内周壁21大致平行。
[0033]
[钢琴线5]
[0034]
钢琴线5是用于导轨3的定位基准的钢线。钢琴线5以安装有配重的状态从设置电梯的建筑物的最上部起悬吊在升降通道2内,并垂直地拉伸。导轨3以该钢琴线5为基准在前后左右方向上进行位置调整。
[0035]
[绳索6]
[0036]
绳索6相对于作业轿厢4的重心[g]在后壁21b侧悬吊作业轿厢4。由此,作业轿厢4成为以向前壁21f侧倾斜的状态悬吊在升降通道2内。并且,此处,将与横壁21s垂直且具有层站开口2a的壁部设为前壁21f。然而,作业轿厢4也可以向不具有层站开口2a的后壁21b侧倾斜。在该情况下,在下文中,未设置层站开口2a的壁部(附图上的后壁21b侧)成为前壁。
[0037]
并且,绳索6卷绕于此处省略图示的卷扬机,通过由该卷扬机卷起绳索6来使作业轿厢4升降自如。
[0038]
[导靴7]
[0039]
导靴7以从作业轿厢4向横壁21s方向突出的状态固定。导靴7具备从前壁21f及后壁21b的方向以具有间隙的方式夹入导轨3的板片的壁部,上述壁部配置为与导轨3的板片轻轻地接触。由此,导靴7使导轨3追随作业轿厢4的在前壁21f与后壁21b之间的前后方向y(第一方向)的移动而移动。此外,为了附图的说明,图3及图4中省略了导靴7的图示。
[0040]
[导轨设置装置1]
[0041]
导轨设置装置1相对于以这样的状态配置在升降通道2内的导轨3和悬吊于升降通道2的作业轿厢4进行固定来使用,是用于以钢琴线5为基准而相对于一对横壁21s定位且固定导轨3的装置。
[0042]
这样的导轨设置装置1具备一对前壁用距离调整部件101、一对横壁用距离调整部件102、拆装机构103、位置测量部件104、轨距105、控制部106、动力供给单元107、操作单元108以及接触检测部件109。上述部件如下构成。
[0043]
〈前壁用距离调整部件101〉
[0044]
前壁用距离调整部件101固定于作业轿厢4,通过调整前壁21f与作业轿厢4的距离,来调整固定于作业轿厢4的导轨3的第一方向上的位置。第一方向是前壁21f与后壁21b之间的前后方向y。
[0045]
该前壁用距离调整部件101在隔着设于前壁21f的层站开口2a的两处位置固定于作业轿厢4。上述一对前壁用距离调整部件101相对于作业轿厢4直接拆装自如。这样的前壁用距离调整部件101以相对于作业轿厢4固定的状态设置于前壁21f侧,在设置于前壁21f侧的状态下进一步向前壁侧延伸,通过延伸来按压前壁21f地设置。
[0046]
此处,作业轿厢4相比重心[g]而在后壁21b侧悬吊,从而成为向前壁21f侧倾斜的状态。由此,通过将固定于作业轿厢4的前壁用距离调整部件101延伸至按压前壁,能够调整前壁21f与作业轿厢4的距离[d]。并且,前壁用距离调整部件101在如上所述那样使作业轿厢4在前后方向y上移动时,能够经由导靴7使导轨3在前后方向y上移动。
[0047]
在以对于作业人员能够确保充足的空间的程度在与前后方向y垂直的左右方向x上分离的两处位置,这样的前壁用距离调整部件101固定于作业轿厢4的扶手4b。并且,各前壁用距离调整部件101优选重叠地固定于扶手4b中与横壁21s平行的部分。由此,根据前壁用距离调整部件101向作业轿厢4的固定,作业轿厢4的内部不会变小,能够确保作业轿厢4内的操作性。
[0048]
上述的伸缩自如的前壁用距离调整部件101由将电、液压、气压作为驱动力的线性促动器构成。尤其,适用由即使在停止时受到按压力而长度也难以变化的电动滚珠丝杠形成的线性促动器。这是因为:前壁用距离调整部件101在将导轨3调整在预定的位置后,在直到固定导轨3为止的期间内,需要保持导轨3的位置。
[0049]
并且,前壁用距离调整部件101也可以具备检测预定的伸缩长度的长度检测部件(图示省略)。该长度检测部件是检测前壁用距离调整部件101为初始的长度亦即使前壁用距离调整部件101延伸前的长度的单元。这样的长度检测部件使用内置于前壁用距离调整部件101的限位开关。除此之外,也可以使用测量前壁用距离调整部件101的前端与内周壁21的距离的距离传感器、或者内置于前壁用距离调整部件101的驱动部的编码器。
[0050]
〈横壁用距离调整部件102〉
[0051]
横壁用距离调整部件102相对于导轨3固定,通过调整两个横壁21s与导轨3的距离,从而调整导轨3的第二方向上的位置。第二方向是两个横壁21s间的左右方向x。
[0052]
该横壁用距离调整部件102例如经由下述的拆装机构103固定于导轨3,通过拆装机构103使相对于导轨3的固定状态变得自如。此外,横壁用距离调整部件102也可以是相对于导轨3直接且自如地固定的结构。
[0053]
在固定于导轨3的状态下,横壁用距离调整部件102在延伸设置方向上伸缩自如,通过伸缩来调整两个横壁21s间的作业轿厢4的位置。由此,横壁用距离调整部件102经由拆装机构103使导轨3在左右方向x上移动。
[0054]
这样的横壁用距离调整部件102在接近导轨3的位置且在相对于导轨3在前后方向y上偏离的位置,经由拆装机构103固定于导轨3。由此,即使在导轨3与横壁21s之间的距离狭窄的情况下,与将横壁用距离调整部件102直接固定于导轨3的情况相比,能够较大地取得横壁用距离调整部件102的伸缩范围。也就是说,在将横壁用距离调整部件102直接固定于导轨3的情况下,横壁用距离调整部件102配置于导轨3的凸缘面与横壁21s之间,因此横壁用距离调整部件102的伸缩范围被导轨3的凸缘面与横壁21s的间隔限定。相对于此,经由拆装机构103将横壁用距离调整部件102固定于相对于导轨3在前后方向y上偏离的位置,横壁用距离调整部件102的伸缩范围不会被导轨3的凸缘面与横壁21s的间隔限定。其结果,能够扩大由各横壁用距离调整部件102进行的导轨3的左右方向的调整范围。
[0055]
这样的横壁用距离调整部件102也优选使用与上述的前壁用距离调整部件101相同的结构。并且,该横壁用距离调整部件102也可以也具备与上述的前壁用距离调整部件101相同的长度检测部件。此外,图1中,示出在作业轿厢4的朝向横壁21s的两侧设有一对横壁用距离调整部件102的结构,但横壁用距离调整部件102也可以为任一个。在该情况下,成为导轨3向设置横壁用距离调整部件102的方向倾斜。
[0056]
〈拆装机构103〉
[0057]
拆装机构103是为了将横壁用距离调整部件102固定于导轨3而使用的机构(尤其
参照图3、图4)。拆装机构103固定于各横壁用距离调整部件102,也可以与各横壁用距离调整部件102一体形成。上述拆装机构103在与各横壁用距离调整部件102的伸缩方向垂直的方向上延伸设置,构成为从前后方向y夹压构成导轨3的t型钢的凸缘部的夹紧机构。
[0058]
这样的拆装机构103具有从两端侧夹压并保持导轨3的凸缘部的一对保持部103a、以及用于调整一对保持部103a的间隔的夹紧把手103b。拆装机构103通过使夹紧把手103b旋转来调整保持部103a的间隔,由此对导轨3夹压得到的保持和解除变得自如。
[0059]
一对保持部103a分别具有从两个方向夹持导轨3的凸缘部的两侧的端缘的c型形状,防止横壁用距离调整部件102从导轨3脱落。此处,图3示出横壁用距离调整部件102延伸的状态,图4示出横壁用距离调整部件102缩短的状态。如上述图3、图4所示,在横壁用距离调整部件102伸缩时,以导轨3的凸缘部的两侧的端缘中离横壁用距离调整部件102较近的部位[b]为轴,相对于拆装机构103产生力矩。此时,利用具有从两个方向夹入凸缘部的两侧的端缘的形状的保持部103a,即使在产生了上述力矩的情况下,也防止从导轨3脱落。
[0060]
〈位置测量部件104〉
[0061]
位置测量部件104是相对于成为导轨3的定心的基准的一对钢琴线5测量导轨3的前后方向y和左右方向x上的位置的单元。该位置测量部件104相对于导轨3的板片直接或者经由托架以预定状态被固定。这样的位置测量部件104的位置测量的方式没有限定,但优选使用小型轻量的部件,例如为光学式的钢琴线位置检测器,具备钢琴线5穿过的孔部104a,测量穿过孔部104a的钢琴线5的位置。
[0062]
〈轨距105〉
[0063]
轨距105是用于将两条导轨3保持为预定间隔的部件,相对于导轨3拆装自如。该轨距105具备以预定状态抱持导轨3的两端的固定部105a(参照图3、图4)。该固定部105a具有向例如在导轨3的两端朝向不同的方向的两面推压的基准面以及将导轨3按压至基准面的夹紧件,保持水平地固定于一对导轨3间,将固定于轨距105的两端的导轨3保持为预定的距离。
[0064]
〈控制部106〉
[0065]
控制部106是用于控制前壁用距离调整部件101和横壁用距离调整部件102所进行的距离调整的单元。这样的控制部106例如由嵌入式微机之类的计算机构成。控制部106接收位置测量部件104所获取到的轨道的位置信息,通过自动控制前壁用距离调整部件101和横壁用距离调整部件102的伸缩来调整导轨3的位置。该控制部106将导轨3的位置调整作业自动化,而且同时进行导轨3的左右方向x、前后方向y的两个方向上的位置调整作业,从而支援导轨3的定位作业。此外,在下文的导轨设置方法中,说明控制部106所进行的导轨3的位置调整的顺序。
[0066]
〈动力供给单元107〉
[0067]
动力供给单元107是供给驱动导轨设置装置1的各部分所需的动力的单元。这样的动力供给单元107可以使用例如将一般的商用电源转换成导轨设置装置1使用的电压的开关电源或者使用充电电池。
[0068]
〈操作单元108〉
[0069]
操作单元108是作业人员用于操作导轨设置装置1的单元。操作单元108具备按钮作为输入部。并且,具备用于作业人员确认前壁用距离调整部件101、横壁用距离调整部件
102、位置测量部件104的状态的输出部。输出部是在显示输出以及作业完成时点亮的显示用的灯等。再有,操作单元108具备用于与控制部106通信的通信部。该通信通过有线或无线的方式进行。
[0070]
〈接触检测部件109〉
[0071]
接触检测部件109是用于检测前壁用距离调整部件101和横壁用距离调整部件102的前端与内周壁21接触的情况的单元。接触检测部件109优选使用测量流向前壁用距离调整部件101和横壁用距离调整部件102的电流的电流传感器。
[0072]
此外,作为接触检测部件109,也能够使用设于前壁用距离调整部件101和横壁用距离调整部件102的前端的接触传感器或距离传感器。但是,接触传感器或距离传感器需要另外设于前壁用距离调整部件101以及横壁用距离调整部件102的前端。因此,需要用于将传感器的信号传递至控制部106的信号线。相对于此,若为电流传感器,则能够安装于控制部106以及动力供给单元107的附近,有作业人员不需要处理信号线的优点。
[0073]
《导轨设置方法》
[0074]
图5及图6是示出使用了实施方式的导轨设置装置的导轨设置方法的流程图(其一)及(其二)。以下,基于上述图5及图6并参照上述的图1~图4及其它需要的附图对导轨设置方法进行说明。
[0075]
〈步骤s00〉
[0076]
在步骤s00中,作业人员乘入作业轿厢4,将前壁用距离调整部件101固定于作业轿厢4的扶手4b。此时,前壁用距离调整部件101缩短为初始的长度以便不会妨碍固定作业。
[0077]
〈步骤s01〉
[0078]
在步骤s01中,作业人员通过操作此处的省略图示的卷扬机,使作业轿厢4升降,移动至预定的高度。
[0079]
〈步骤s02〉
[0080]
在步骤s02中,作业人员经由拆装机构103将一对横壁用距离调整部件102固定于导轨3。此时,横壁用距离调整部件102缩短为初始的长度以便不会妨碍固定作业。并且,作业人员将位置测量部件104以预定状态分别固定于一对导轨3。
[0081]
并且,作业人员将轨距105以预定状态相对于两个导轨3进行固定。在该状态下,如图1所示,作业轿厢4的重心[g]位于相对于轨距105向前壁21f侧离开为距离[l]的地点,作业轿厢4向前壁21f侧倾斜。
[0082]
〈步骤s03〉
[0083]
在步骤s03中,作业人员通过操作单元108的操作,输入使前壁用距离调整部件101和横壁用距离调整部件102的前端与内周壁21接触的指令。
[0084]
由此,控制部106使前壁用距离调整部件101和横壁用距离调整部件102延伸。控制部106根据来自接触检测部件109的信号,在检测到前壁用距离调整部件101和横壁用距离调整部件102的前端分别与内周壁21接触时,分别停止前壁用距离调整部件101和横壁用距离调整部件102的延伸。这样,通过将前壁用距离调整部件101和横壁用距离调整部件102的前端与内周壁21的接触自动化,能够降低作业人员的作业负荷。
[0085]
并且,控制部106将前壁用距离调整部件101和横壁用距离调整部件102的前端已与内周壁21接触的通知输出至操作单元108的输出部。由此,作业人员能够确认前壁用距离
调整部件101和横壁用距离调整部件102的前端与内周壁21的接触已完成。
[0086]
〈步骤s04〉
[0087]
在步骤s04中,作业人员在操作单元108的输出部中确认到前壁用距离调整部件101和横壁用距离调整部件102的前端与内周壁21的接触已完成后,通过操作单元108的操作,输入实施导轨3的定位的指令。
[0088]
由此,控制部106基于来自位置测量部件104的信息,控制前壁用距离调整部件101和横壁用距离调整部件102各自的伸缩,使作业轿厢4移动,从而将固定于作业轿厢4的导轨3定位于预定的位置。这样,通过将导轨3的定位作业进行了自动化,能够降低作业人员的作业负荷。
[0089]
并且,控制部106使导轨3已定位的通知输出至操作单元108的输出部。此时,例如若定位已完成,则操作单元108使作为输出部而设置的显示用的灯点亮,若定位未完成,则操作单元108使灯熄灭。通过该灯的点亮,作业人员能够确认导轨3已定位。
[0090]
〈步骤s05〉
[0091]
在步骤s05中,作业人员使用托架将导轨3固定于内周壁21。此时,在直到固定导轨3为止的期间,前壁用距离调整部件101和横壁用距离调整部件102通过将前端推压至内周壁21来保持导轨3的位置。
[0092]
此外,控制部106基于来自位置测量部件104的信息,总是使导轨3的定位状态输出至操作单元108的输出部。由此,在作业人员所进行的导轨3的固定作业中,在导轨3位置偏离的情况下,操作单元108使作为操作单元108的输出部而设置的显示用的灯熄灭,能够使作业人员认识到导轨3的位置偏离。
[0093]
〈步骤s06〉
[0094]
在步骤s06中,作业人员通过操作单元108中的显示用的灯的点亮来判断导轨3是否处于已定位的状态。若是点亮的情况,则判断为导轨3的位置良好(是)而进入步骤s07。另一方面,在显示用的灯熄灭的情况下,作业人员判断为导轨3的位置不是良好(否)而返回至步骤s04。然后,再次通过操作单元108的操作,输入实施导轨3的定位的指令。
[0095]
〈步骤s07〉
[0096]
在步骤s07中,作业人员判断在已定位的状态下导轨3的固定是否完成,在判断为固定已完成(是)的情况下进入下一步骤s08。另一方面,在固定未完成(否)的情况下返回至步骤s05,继续进行固定作业。
[0097]
〈步骤s08〉
[0098]
在步骤s08中,作业人员通过操作单元108的操作,输入将前壁用距离调整部件101和横壁用距离调整部件102缩短至初始的长度的指令。
[0099]
由此,控制部106将前壁用距离调整部件101和横壁用距离调整部件102分别进行缩短,解除前壁用距离调整部件101和横壁用距离调整部件102的前端与内周壁21的接触。此时,若是前壁用距离调整部件101以及横壁用距离调整部件102具备长度检测部件的情况,则控制部106基于来自长度检测部件的信号,将前壁用距离调整部件101以及横壁用距离调整部件102返回至初始的长度。
[0100]
并且,控制部106使前壁用距离调整部件101以及横壁用距离调整部件102返回至初始的长度的情况显示于操作单元108的输出部。由此,作业人员根据操作单元108的输出
部的输出,能够确认到前壁用距离调整部件101以及横壁用距离调整部件102返回至初始的长度。因此,能够省去作业人员逐次地在前壁用距离调整部件101以及横壁用距离调整部件102中确认前壁用距离调整部件101以及横壁用距离调整部件102的长度的劳力和时间,也能够在这期间实施其它作业,能够降低作业负荷。
[0101]
〈步骤s09〉
[0102]
在步骤s09中,作业人员从两个导轨3拆下轨距105。并且,作业人员从导轨3拆下位置测量部件104。再有,作业人员解除拆装机构103对各导轨3的夹压,从导轨3拆下拆装机构103以及横壁用距离调整部件102。
[0103]
〈步骤s10〉
[0104]
在步骤s10中,作业人员实施导轨3的固定是否已完成的判断。在作业人员在预先决定的所有高度位置都实施了一对导轨3双方的固定的情况下,判断为固定已完成(是)而进入步骤s11。在除此以外的情况下,判断为固定未完成(否)而返回至步骤s01,重复之后的步骤。
[0105]
〈步骤s11〉
[0106]
在步骤s11中,作业人员从作业轿厢4拆下前壁用距离调整部件101,结束导轨3的设置作业。
[0107]
《实施方式的效果》
[0108]
以上说明的实施方式的导轨设置装置1构成为,将在前后方向y上对导轨3进行位置调整的前壁用距离调整部件101以及在左右方向x上对导轨3进行位置调整的横壁用距离调整部件102分割为不同的部件而分开地固定于作业轿厢4和导轨3。由此,导轨设置装置1被分割成小型轻量的多个部件,操作变得容易。因此,导轨设置装置1相对于作业轿厢4以及导轨3的固定及拆除通过被分割为小型轻量的多个各部件的固定来实施。因此,与导轨设置装置1构成为一体的情况相比,能够减轻导轨设置装置1的固定及拆除的作业负荷。
[0109]
并且,图7是说明实施方式的导轨设置方法的俯视图,在步骤s09中,示出从导轨3拆下轨距105、拆装机构103、横壁用距离调整部件102后的状态。如该图所示,当在导轨3的设置顺序中变更作业轿厢4的高度时,能够仅拆下固定于导轨3的部件而前壁用距离调整部件101保持固定于作业轿厢4不变。由此,也能够减轻作业负荷。
[0110]
并且,在该状态下,由于能够确保作业轿厢4内的空间,所以在升降通道2内的各高度实施的其它作业也能够无压力地实施。因此,也能够在升降通道2内的各高度并行地实施导轨3的设置和除此以外的作业。其结果,能够提高电梯装置的设置整体的作业效率。
[0111]
此外,本发明不限定于上述的实施方式以及变形例,还包括各种变形例。例如,上述的实施方式是为了容易理解地说明本发明而进行了详细说明的实施方式,并不限定于必须具备所说明的所有结构。并且,能够将某实施方式的结构的一部分置换成其它实施方式的结构,并且也能够在某实施方式的结构中追加其它实施方式的结构。并且,能够对各实施方式的结构的一部分进行其它结构的追加、删除、置换。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1