一种用于运粮车粮食转运的自动卸车机的制作方法
1.本发明涉及粮食储藏技术领域,更为具体地说是指一种用于运粮车粮食转运的自动卸车机。
背景技术:
2.卸车机是一种用于粮食转运设备,现有的卸车机主要包括一个粮食输送机以及一个固定在粮食输送机上的下料斗,该料斗主要用于将从卸粮口出料的粮食引导到粮食输送机上。
3.当卸车机用于运粮车粮食转运时,运粮车在卸料前需要移动车辆使其尽量靠近卸车机的下料斗。然而,由于运粮车的卸料口与卸车机的下料斗之间通常有较大高度落差,且车辆无法紧贴料斗,因此需要在卸料口与下料斗之间铺上一个导料板以防止粮食抛洒到外部。这种作业方式效率低下,不仅每部车辆停靠后都需要将导料板倾斜安装在卸料口与下料斗之间,然后对导料板底部进行固定,卸料完成后还要再将导料板拆卸。
4.另外,由于运粮车的卸料口与下料斗之间存在较大高度落差,卸粮时会产生大量粉尘,不仅影响作业工人的作业视线,同时也危害作业工人的身体健康。为此,我们提供一种用于运粮车粮食转运的自动料车机。为此,我们提供一种用于运粮车粮食转运的自动卸车机。
技术实现要素:
5.本发明提供一种用于运粮车粮食转运的自动卸车机,以解决现有卸车机在运粮车停靠后需要在卸料口与下料斗之间倾斜安装并固定导料板,不仅效率低下,而且产生大量粉尘,危害作业工人的身体健康等问题。
6.本发明采用如下技术方案:一种用于运粮车粮食转运的自动卸车机,包括粮食输送机及固定于粮食输送机上的下料斗,所述下料斗上方还设有一个卸料斗,所述卸料斗远离运粮车的侧面平行设有一个调节杆,所述卸料斗通过若干套环可滑动套设于所述调节杆上,所述下料斗上设有一个推动卸料斗沿所述调节杆轴向方向移动的卸料斗移动机构,所述卸料斗在所述卸料斗移动机构作用下与运粮车的卸料口对齐;所述调节杆的一端可前后摆动地铰接在所述下料斗上,该调节杆的另一端连接一个卸料斗平行校正机构,所述平行校正机构拉动所述调节杆前后摆动,使连接在调节杆上的卸料斗侧面与运粮车平行;所述卸料斗上还连接一个驱动卸料斗以调节杆为轴向下或向上翻转的卸料斗翻转机构。
7.一较佳实施方案中,上述卸料斗移动机构包括步进电机、涡轮、蜗杆以及移动丝杆,所述步进电机通过基座固定安装于所述调节杆上,该步进电机的输出轴与所述蜗杆连接,所述涡轮与所述蜗杆啮合,且所述涡轮中心开设一个螺纹通孔,所述移动丝杆连接于所述螺纹通孔,该移动丝杆与所述调节杆平行,且一端预留有一个螺纹段,另一端则固定连接一个轴承,卸料斗侧壁上开设一个以调节杆为圆心的圆弧槽,轴承安装在该圆弧槽内。
8.一较佳实施方案中,上述卸料斗平行校正机构包括丝杆电机、丝杆、丝杆螺母以及连杆组件,所述丝杆电机固定于所述下料斗上,所述丝杆一端固定连接于所述丝杆电机的输出端,另一端可以通过轴承固定于下料斗上,所述丝杆螺母连接于所述丝杆上,该丝杆螺母的侧面通过所述连杆组件与所述调节杆连接。
9.一较佳实施方案中,上述卸料斗翻转机构包括调节绳、定滑轮及绳索卷绕电机,所述绳索卷绕电机固定于所述下料斗上,所述定滑轮固定安装于所述卸料斗外侧壁顶端中部的旁侧,所述调节绳一端与所述卸料斗外侧壁顶端中部固定连接,另一端跨过所述定滑轮与所述绳索卷绕电机固定连接。
10.进一步地,本发明自动卸车机的卸料斗上方还设有一个吸尘装置,所述吸尘装置包括吸尘管、沉降箱及吸尘风机,所述吸尘管固定设于所述卸料斗上方,该吸尘管末端连接一个伸缩软管,所述伸缩软管通过所述吸尘风机与沉降箱连接。
11.优选地,上述调节杆的一端铰接在所述沉降箱上。
12.更进一步地,本发明自动卸车机还包括一个plc控制器,所述卸料斗移动机构、所述卸料斗平行校正机构以及所述卸料斗翻转机构的动力源分别与所述plc控制器电性连接。
13.再进一步地,上述卸料斗靠近运粮车的侧面沿同一水平线上间隔设有若干个接近感应器,若干个所述接近感应器分别与所述plc控制器电性连接。
14.由上述对本发明的结构描述可知,和现有技术相比,本发明具有如下优点:1、本发明的自动卸车机,在下料斗的上方增设调节杆及卸料斗,卸料斗可滑动设于调节杆上,并且下料斗上还设有卸料斗移动机构、卸料斗平行校正机构以及卸料斗翻转机构,当运粮车停靠后,车辆与卸料斗不平行时,卸料斗平行校正机构动作,拉动调节杆前后摆动,使卸料斗侧面与运粮车侧壁平行;再由卸料斗移动机构推动卸料斗沿调节杆移动,使卸料斗的顶端开口与运粮车的卸料口对准;最后卸料斗翻转机构工作,驱动卸料斗以调节杆为轴向下翻转,使卸料斗的侧面抵靠在运粮车的侧壁上,运粮车打开卸料口即可进行卸料。该结构的自动卸车机,可完成卸料斗与运粮车的自动对准流程,大大提高了卸粮效率,卸粮时无需现场作业人员,防止现场的粉尘对作业人员的危害。
15.2、本发明的自动卸车机,在卸料斗上方还设有吸尘装置,可对卸料过程中产生的粉尘进行吸收,防止粉尘污染现场环境及危害工人身体健康。
附图说明
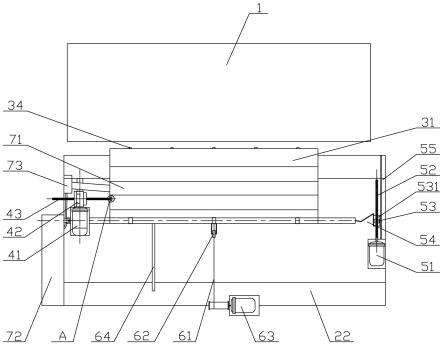
16.图1为本发明省略部分机构的结构示意图。
17.图2为本发明的俯视图。
18.图3为图2中a的放大示意图。
19.图4为本发明的右视图。
具体实施方式
20.下面参照附图说明本发明的具体实施方式。为了全面理解本发明,下面描述到许多细节,但对于本领域技术人员来说,无需这些细节也可实现本发明。对于公知的组件、方法及过程,以下不再详细描述。
21.参照图1至图4。其中,图1中省略了卸料斗移动机构、卸料斗平行校正机构以及卸料斗翻转机构。本发明提供一种用于运粮车粮食转运的自动卸车机,包括粮食输送机21及固定于粮食输送机上的下料斗22。以下所描述到的下料斗中心轴线是指平行于粮食输送机的移动方向。下料斗22上方设有一个卸料斗31,所述卸料斗31远离运粮车1的侧面平行设有一个调节杆32,卸料斗31通过若干套环33可滑动套设于所述调节杆32上。卸料斗31的形状与下料斗近似,而且卸料斗31安装在偏离下料斗22上部中心轴线、靠近运粮车的一侧。其中,卸料斗31靠近运粮车1的一侧伸出下料斗22的外部。
22.参照图2和图4,下料斗22上设有一个推动卸料斗31沿调节杆32轴向方向移动的卸料斗移动机构,所述卸料斗31在所述卸料斗移动机构作用下与运粮车1的卸料口对齐;所述调节杆32的一端可前后摆动地铰接在所述下料斗22上,该调节杆32的另一端连接一个卸料斗平行校正机构,平行校正机构拉动调节杆32前后摆动,使连接在调节杆32上的卸料斗31侧面与运粮车1平行;卸料斗31上还连接一个驱动卸料斗31以调节杆32为轴向下或向上翻转的卸料斗翻转机构。
23.参照图2和图3,上述卸料斗移动机构包括步进电机41、涡轮42、蜗杆以及移动丝杆43,所述步进电机41通过基座411固定安装于所述调节杆32上,该步进电机41的输出轴与所述蜗杆连接,所述涡轮42与所述蜗杆啮合,且所述涡轮42中心开设一个螺纹通孔,所述移动丝杆43连接于所述螺纹通孔,该移动丝杆42与所述调节杆32平行,且一端预留有一个螺纹段,另一端则固定连接一个轴承44,卸料斗31侧壁上开设一个以调节杆32为圆心的圆弧槽310,轴承44安装在该圆弧槽310内。圆弧槽310外表面设有限位凸环311,凸环311内径小于轴承44外径,但大于轴承44内径,防止轴承44脱出。当卸料斗31以调节杆32为中心轴进行摆动时,轴承44外圈可在该圆弧槽310内活动。
24.参照图2和图4,上述卸料斗平行校正机构包括丝杆电机51、丝杆52、丝杆螺母53以及连杆组件54,所述丝杆电机51固定于所述下料斗22上,所述丝杆52一端固定连接于所述丝杆电机51的输出端,另一端为自由端。当然,该丝杆的另一端也可以通过轴承固定于下料斗上。所述丝杆螺母53连接于所述丝杆51上,该丝杆螺母53的侧面通过所述连杆组件54与所述调节杆32连接。
25.参照图2和图4,为提高丝杆螺母移动的平顺性,下料斗上还固定设有一个滑动轨道55,所述丝杆螺母53通过滑块531设于滑动轨道55上。
26.参照图2和图4,上述卸料斗翻转机构包括调节绳61、定滑轮62及绳索卷绕电机63,所述绳索卷绕电机63固定于所述下料斗22上,所述定滑轮62固定安装于所述卸料斗31外侧壁顶端中部的旁侧,所述调节绳61一端与所述卸料斗31外侧壁顶端中部固定连接,另一端跨过所述定滑轮62与所述绳索卷绕电机63固定连接。为防止绳索卷绕电机拉动卸料斗向调节绳一侧翻转至与水平面平行时,仍然继续向下翻转进而导致卸料斗发生侧翻,下料斗上还设有一个限位顶杆64,当绳索卷绕电机拉动卸料斗向调节绳一侧翻转至与水平面平行时,限位顶杆的顶端顶持在卸料斗的中上部侧面,绳索卷绕电机无法继续卷绕调节绳。
27.当卸料斗需要向下翻转抵靠在运粮车上时,绳索卷绕电机工作,使调节绳变长,卸料斗依靠自身重量即可向下翻转;卸粮结束后则切换绳索卷绕电机的旋转方向,将调节绳卷绕,使卸料斗向上翻转,直至其顶面与水平平行。
28.参照图1和图2,本发明自动卸车机的卸料斗上方还设有一个吸尘装置,所述吸尘
装置包括吸尘管71、沉降箱72及吸尘风机73,所述吸尘管71固定设于所述卸料斗31上方,该吸尘管71末端连接一个伸缩软管74,所述伸缩软管74通过所述吸尘风机73与沉降箱72连接。上述调节杆32的一端铰接在沉降箱72上。
29.本发明自动卸车机还包括一个plc控制器,上述卸料斗移动机构的步进电机41、卸料斗平行校正机构的丝杆电机51以及卸料斗翻转机构的绳索卷绕电机63分别与plc控制器电性连接。通过plc控制器控制各电机的动作顺序,以使卸料斗31与运粮车1平行,且与卸料斗31对齐并紧贴车辆,防止粮食抛洒到外部。
30.参照图2和图4,上述卸料斗31靠近运粮车的侧面沿同一水平线上间隔设有若干个接近感应器34,若干个接近感应器34分别与plc控制器电性连接。接近传感器34用于感应卸料斗31侧面与运粮车1侧面之间的间距,并将其采集到的数据传递给plc控制器。当接近传感器34所采集的数据不同时,由plc控制器控制卸料斗平行校正机构的丝杆电机51动作,使采集数据较大(即间距较大)的接近传感器34相对应的卸料斗31一侧朝向运粮车一侧转动,直到各接近传感器34所采集的数据趋近于相等。
31.本发明自动卸车机的工作流程如下:当运粮车停靠后,车辆与卸料斗不平行时,卸料斗平行校正机构动作,拉动调节杆前后摆动,使卸料斗侧面与运粮车侧壁平行;再由卸料斗移动机构推动卸料斗沿调节杆移动,使卸料斗的顶端开口与运粮车的卸料口对准;最后卸料斗翻转机构工作,驱动卸料斗以调节杆为轴向下翻转,使卸料斗的侧面抵靠在运粮车的侧壁上,运粮车打开卸料口即可进行卸料。
32.上述仅为本发明的具体实施方式,但本发明的设计构思并不局限于此,凡利用此构思对本发明进行非实质性的改动,均应属于侵犯本发明保护范围的行为。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1