一种图书自动存取装置
1.本发明涉及图书管理领域,尤其是一种图书自动存取装置。
背景技术:
2.图书馆中两个书柜之间空间不大,图书管机械手需要徘徊在取书和还书之间,因此现有的图书自动存取装置存在存取书不能够流畅,速度慢、操作复杂、效率低的问题。
技术实现要素:
3.为解决上述技术问题,本发明提供了一种图书自动存取装置,包括机械手装置和移动平台,其特征在于,所述机械手装置包括取书机构和夹书机构,所述机械手装置包括用于书籍上方的单个手指夹持器,所述夹书机构包括钳式机械手;所述机械手装置还包括有自动电机驱动源控制单个手指夹持器和钳式机械爪开合,所述自动电机驱动源上方设置有固定板,所述固定板上方固定有单个手指夹持器,所述固定板下部设有滑动轨道,所述钳式机械爪的后端滑动连接在所述滑动轨道上。
4.进一步地,所述固定板上方设置有转盘,所述转盘上方设置有旋转气缸,所述旋转气缸与单个手指夹持器连接,所述手指夹持器的端部设置有薄片,薄片后部下方设置有指垫。
5.进一步地,所述移动平台包括平移机构,所述平移机构包括平移丝杠,所述平移丝杠与机架螺旋配合,平移步进电机位于所述平移丝杠端部;所述机架上方前端设有顶杆,所述机械手装置位于所述机架上方后端。
6.进一步地,所述机架同时与平移导轨轴配合,所述平移丝杠和所述平移导轨轴共同连接在夹持器底座内腔内,所述平移步进电机位于所述夹持器底座的外壳上且位于平移丝杠的端部。
7.进一步地,所述机械手装置采用混合硬铝合金细沙喷塑材料,所述机械手装置的端部安装有摄像头。
8.进一步地,所述移动平台还包括升降机构、搬运机构,所述搬运机构包括轨道,所述轨道位于图书书架上端外边缘,所述轨道与驱动电机机构配合,所述驱动电机输出轴安装有小齿轮,所述小齿轮与所述书架上的轨道同步安装的齿条啮合滚动;所述驱动电机设置于电机安装支架上,所述电机安装支架通过滑块设置于所述轨道上且所述电机安装支架有一部分伸出书架外边缘,所述驱动电机设置于所述电机安装支架位于书架内侧的一端,所述电机安装支架伸出书架外边缘的一端装有升降机构,所述升降机构上设有手部支架,所述平移机构位于所述手部支架上。
9.进一步地,所述轨道为圆导轨机构。
10.进一步地,所述升降机构包括升降步进电机,所述升降步进电机位于电机安装支架上方,所述升降步进电机通过位于所述电机安装支架下方的联轴器与升降丝杠连接;所述升降丝杠与所述手部机架上的螺纹孔配合;所述手部机架上还设有光孔,所
述光孔与升降导轨轴配合,所述升降导轨轴与升降丝杠平行。
11.进一步地,所述电机安装支架呈倒l型,所述电机支架包括横直杠位于驱动电机下方,还包括竖直杠用于固定升降机构中的升降丝杆和所述升降导轨轴,所述升降丝杠与轴承连接,所述轴承通过固定件与竖直杠连接,所述固定件同时与所述升降导轨轴固定连接。
12.进一步地,所述升降导轨轴顶端套设有升降导轨轴端套,所述升降导轨轴端套与所述联轴器共同设置于电机安装支架下方。
13.有益效果:能够确保机械手装置在图书书架狭窄的空间中流畅快速的移动,进行快速取书及还书。简单易操作等,且工作效率高。
附图说明
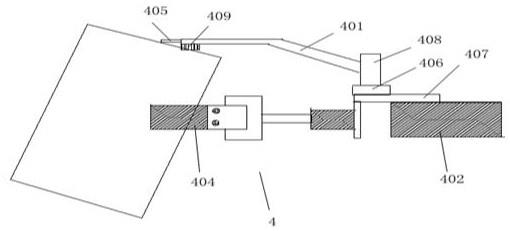
14.图1为机械手装置结构示意图;图2为平移机构结构示意图图3为图书自动存取装置的结构示意图图4为搬运机构结构示意图;图5为升降机构结构示意图。
15.其中,1.搬运机构,101.书架,102.齿条,103.驱动电机,104.电机安装支架,105.小齿轮,106.滑块,107.轨道,2.升降机构,201.手部机架,202.升降导轨轴,203.升降丝杠, 204.升降步进电机,205.联轴器,206.导轨轴端套,207.轴承,3.平移机构,301.平移导轨轴,302.啮合螺母,303.平移丝杠,304.平移步进电机,305.机架,4.机械手装置,401.单个手指夹持器,402.自动电机驱动源,403.顶杆,404.钳式机械爪,405.薄片,406.转盘, 407.固定板,408.旋转气缸,409.指垫。
具体实施方式
16.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
17.根据图1-5所示,本发明中图书自动存取装置的主要结构组成部分有:移动平台以及机械手装置两大重要部分组合而成。移动平台的主要工作是能够装载存取书籍的机械手装置、控制系统以及电源等多种结构的装置。通过移动平台带动机械手装置运动,机械手装置主要工作是能识别条形码,查找书籍具体位置并完成存取工作。
18.当机器自动识别后会发出相应的指令,此时移动平台则会按照指令移动至相应地点。机械手装置部安装有摄像头,扫描条形码后能够识别书籍,成功识别之后,机械手装置由控制系统控制将书籍取下。当在还书时机械手装置也会得到相应的指令,机械手装置会按照指令在移动平台的带领下将书籍取下。当在还书时机械手装置也会得到相应的指令,机械手装置会按照指令在移动平台的带领下将所有书籍归还至指定地点。机械手装置端部的摄像头能够识别书籍所在位置,可由机械手装置将书籍放置在书架最后。在机械手装置端部安装摄像头后,读取条形码便可快速找到所需书籍的位置。能更流畅实现取书工作。
19.一种图书自动存取装置,包括机械手装置4和移动平台,所述机械手装置4包括取书机构和夹书机构,所述机械手装置4包括用于书籍上方的单个手指夹持器401,所述夹书机构包括钳式机械手404;所述机械手装置4还包括有自动电机驱动源402控制单个手指夹
持器401和钳式机械爪404开合,所述自动电机驱动源402上方设置有固定板407,所述固定板407上方固定有单个手指夹持器401,所述固定板407下部设有滑动轨道,所述钳式机械爪404的后端滑动连接在所述滑动轨道上。
20.进一步地,所述固定板407上方设置有转盘406,所述转盘406上方设置有旋转气缸 408,所述旋转气缸408与单个手指夹持器401连接,所述手指夹持器401的端部设置有薄片405,薄片405后部下方设置有指垫409。
21.进一步地,所述机械手装置4的端部安装有摄像头。
22.取书时需要有执行机构带动机械手臂实现夹取以及拨取这两个工作。设计执行机构时需要分成两部分,一是取书机构,二是夹书机构。机械手装置工作模拟人类取书方式,机械手装置在取书时必须先将其他书籍拨开后,才能两个手板将所需书籍夹取出来。设计时也必须严格按照这一动作进行。执行器需要以三个手指的形式。其中一个是用于拨开书籍,其余两个则用于夹取书籍。
23.取书机构的工作是取出书籍,只需要一个手指即可,当机械手装置接到指令后,此时机械手装置根据命令完成取书工作,结构中其中一个手指即单个手指夹持器用于与书籍上方,将力撤销后,会产生一定摩擦力,此时书籍会向外旋转,这是可以实现拨取工作。
24.每一本书尺寸厚度不一致,设计夹取机构时需控制机械手装置闭合范围。且夹取书籍的力度也需受到控制。夹紧力不能过大或过小,过大会浪费力量,过小则会导致书籍从书架上掉落下来。在实现夹取过程中,有一部分会书籍比较重,需要考虑书惯性以及重量。本次设计的夹取结构必须考虑到以上几点问题后,还需保证整体结构简单,易操作,质量不大,且成本不高。
25.设定一本书籍重量不超过2千克,尺寸大小约为a5、a4大小不同,书籍厚度约为 6-20mm左右,所有书籍都垂直放置于书架上,根据序号从左往右一次排列,每一本书籍都有相应的序号,在哪一层哪一列都有标注,同一层可以不按照顺序放置,但必须保证在一层。
26.机械手的执行装置可以使用模块化方式设计,本次设计中使用的是常见的钳式机械手,这类机械手手指部位使用了两舵夹持器,通过单手指夹持并结合机械手手柄工作,确保能更稳定抓取书籍。
27.使用钳式机械手主要原因是,该类型机械手优点多,是结合多种机械手改进后得出的设计,刚性好,在平行抓取物体更平稳,可以适用于多种标准尺寸的舵机。手指开距较大,能够抓取多种形状的物体,且扩展性能更高。
28.进一步地,所述机械手装置采用混合硬铝合金细沙喷塑材料。
29.这种类型机械手装置的材料比较特殊,使用了混合硬铝合金细沙喷塑材料,机械手手爪以及滑块和轨道等都需要使用架构结构的工程塑料,这类材料有较高的刚度且能承受一定载荷,强度更高,不仅简单易使用且工作寿命更长。一个手爪的质量约72克左右,增宽器重量约为28克。不需要使用增宽器之前,手爪能够撑开距离约52mm左右,通过单节增宽器则能撑开距离约100mm左右。虽然可以使用多个平行增宽器确保手爪能撑开更大间距,但必须保证尺寸在150mm以下。过大可能会导致手爪失灵。
30.进一步地,所述移动平台包括平移机构3,所述平移机构3包括平移丝杠303,所述平移丝杠303与机架305通过啮合螺母302螺旋配合,平移步进电机304位于所述平移丝杠 303端部;所述机架305上方前端设有顶杆403,所述机械手装置位于所述机架305上方后端。
31.进一步地,所述机架305同时与平移导轨轴301配合,所述平移丝杠303和所述平移导轨轴301共同连接在夹持器底座内腔内,所述平移步进电机304位于所述夹持器底座的外壳上且位于平移丝杠303的端部。
32.所述平移丝杠的303的两端且位于宽u型夹持器底座内腔设置有两个轴承,所述轴承为深沟球轴承,设置深沟球轴承,可实现支撑作用。
33.平移机构采用步进电机驱动,平移丝杠303与机架305螺旋配合,机架305同时与平移导轨轴301配合,保证位置精度和刚性以及具备一定承载力,顶杆403为推书机构,用于将书推至倾斜,随机机械手装置闭合夹住书籍,实现取书工作。
34.进行存书工作时,旋转气缸408带动单个手指夹持器401翻转90度,使手指夹持器 401翻转过来,使薄片305垂直状态,所述薄片405插入图书之间,随着薄片405的深入,所述转盘406能够慢慢旋转,撑开图书之间的空隙,方便图书的插入,夹紧图书的钳式机械爪404在固定板407下方向前滑动到端部,将图书送入书架。
35.进行取书的工作时,旋转气缸408带动单个手指夹持器401翻转90度,使手指夹持器401翻转过来,使薄片305水平状态,转盘406带动手指夹持器401与钳式机械爪404 的方向平行。钳式机械爪404在固定板407下方划到末端,顶杆403为推书机构,用于将书推至倾斜,指垫409按在书籍的上方,然后平移机构带动机械手装置向远离图书的方向运动,此时书向外旋转,然后钳式机械爪404在固定板407下方滑到端部,张开抓住书籍,然后在平移机构的带动下,将图书取出。
36.进一步地,所述移动平台还包括升降机构2、搬运机构1,所述搬运机构包括轨道 107,所述轨道107位于图书书架101上端外边缘,所述轨道107与驱动电机103机构配合,所述驱动电机103输出轴安装有小齿轮105,所述小齿轮105与所述书架101上的轨道同步安装的齿条102啮合滚动;所述驱动电机103设置于电机安装支架104上,所述电机安装支架104通过滑块106设置于所述轨道107上且所述电机安装支架104有一部分伸出书架101外边缘,所述驱动电机103 设置于所述电机安装支架104位于书架101内侧的一端,所述电机安装支架104伸出书架 101外边缘的一端装有升降机构2,所述升降机构2上设有手部支架201,所述平移机构3 位于所述手部支架201上。
37.进一步地,所述轨道107为圆导轨机构。
38.在图书书架的顶部安装了齿条机构以及导轨机构,整个搬运机械手主体依靠轨道107 与滑块106机构安装在书架上。为了保证整体结构的相对平衡,选用的是直线圆导轨机构,同时在内侧安装有驱动电机机构,依靠电机的质量和杠杆原理,保持相对平衡。书籍搬运从图书管理员位置移动至对应图书位置,取出或放入图书后,机构自动复位到待命位置,等待下一步指令。
39.进一步地,所述升降机构2包括升降步进电机204,所述升降步进电机204位于电机安装支架104上方,所述升降步进电机204通过位于所述电机安装支架104下方的联轴器 205与升降丝杠203连接;所述升降丝杠203与所述手部机架201上的螺纹孔配合;所述手部机架201上还设有光孔,所述光孔与升降导轨轴202配合,所述升降导轨轴202与升降丝杠203平行。
40.进一步地,所述电机安装支架104呈倒l型,所述电机支架104包括横直杠位于驱动
电机103下方,还包括竖直杠用于固定升降机构2中的升降丝杆203和所述升降导轨轴 202,所述升降丝杠203与轴承207连接,所述轴承207通过固定件与竖直杠连接,所述固定件同时与所述升降导轨轴202固定连接。
41.进一步地,所述升降导轨轴202顶端套设有升降导轨轴端套206,所述升降导轨轴端套206与所述联轴器205共同设置于电机安装支架104下方。
42.本发明中平移机构,升降机构和搬运机构都使用电动机驱动。使用该驱动方式的优点是:不会污染环境,不会产生烟尘,不会发出过度噪声。更适用于图书馆这种安静的场合工作。
43.以上所述仅为本发明较佳的实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1