涡电流式制动装置的制作方法
1.本发明的实施方式涉及电梯装置用的涡电流式制动装置。
背景技术:
2.以往,作为在电梯装置中使用的辅助制动器,已知有曳引绳制动器。曳引绳制动器通过把持电梯装置的主曳引绳而得到制动力。
3.但是,根据电梯轿厢的容量等,有时用曳引绳制动器无法得到充分的制动力。另外,曳引绳制动器有可能对主曳引绳造成损伤。进而,在曳引绳制动器损伤的情况下,修复作业需要较多的人员。
4.因此,如jp5514917b2所公开的那样,作为代替曳引绳制动器的辅助制动器,正在研究将涡电流式制动装置应用于电梯。
5.但是,涡电流式制动装置只是正在开始在铁路上使用。因此,在电梯装置中,用于通过涡电流式制动装置获得充分的制动力的研究还不充分。
技术实现要素:
6.本发明考虑到这样的问题而提出,其目的在于提供一种能够得到充分的制动力的电梯装置用的涡电流式制动装置。
7.一个实施方式的涡电流式制动装置是安装在沿导轨移动的电梯轿厢或平衡配重上的涡电流式制动装置,该导轨沿上下方向延伸,所述涡电流式制动装置具备:磁铁单元,其包括至少一个磁铁;以及动作机构,其使所述磁铁单元在接近所述导轨而使制动器动作的动作位置和比所述动作位置远离所述导轨的非动作位置之间移动。
附图说明
8.图1是概略性地表示一个实施方式的电梯装置的结构的图。图2是图1所示的涡电流式制动装置的立体图。图3是示意性地表示磁铁单元处于非动作位置的涡电流式制动装置的图。图4是示意性地表示磁铁单元处于中间位置的涡电流式制动装置的图。图5是示意性地表示磁铁单元处于动作位置的涡电流式制动装置的图。图6a是示意性地表示处于动作位置的磁铁单元和导轨的图。图6b是表示图6a所示的磁铁单元的磁通线的图。图7是与图6a对应的图,是表示涡电流式制动装置的变形例的图。图8是与图6a对应的图,是表示涡电流式制动装置的另一变形例的图。图9a是表示涡电流式制动装置的又一变形例的图,是示意性地表示处于非动作位置的磁铁单元和导轨的图。图9b是沿上下方向观察图9a所示的涡电流式制动装置的图。
图10a是示意性地表示处于中间位置的磁铁单元和导轨的图。图10b是沿上下方向观察图10a所示的涡电流式制动装置的图。图11a是示意性地表示处于动作位置的磁铁单元和导轨的图。图11b是沿上下方向观察图11a所示的涡电流式制动装置的图。图11c是表示涡电流式制动装置的又一变形例的图,是示意性地表示处于动作位置的磁铁单元和导轨的图。图11d是沿上下方向观察图11c所示的涡电流式制动装置的图。图12a是表示涡电流式制动装置的又一变形例的图,是示意性地表示位于中间位置的磁铁单元和导轨的图。图12b是沿上下方向观察图12a所示的涡电流式制动装置的图。图13a是示意性地表示处于动作位置的磁铁单元和导轨的图。图13b是沿上下方向观察图13a所示的涡电流式制动装置的图。图14是与图6a对应的图,是表示涡电流式制动装置的又一变形例的图。图15是与图6a对应的图,是表示涡电流式制动装置的又一变形例的图。图16是与图6a对应的图,是表示涡电流式制动装置的又一变形例的图。图17是与图6a对应的图,是表示涡电流式制动装置的又一变形例的图。
具体实施方式
9.以下,参照附图对一个实施方式进行说明。为了在附图之间明确方向的关系,在几个附图中,通过附加了共同的符号的箭头表示共同的方向。例如如图1所示,通过在圆中设置了点的记号来表示沿着与附图的纸面垂直的方向的箭头。
10.如图1所示,电梯装置1具有能够在升降通道2内升降的电梯轿厢3、经由主曳引绳4与电梯轿厢3连接的平衡配重5、设置在机械室6中并经由主曳引绳4使电梯轿厢3和平衡配重5升降的卷扬机7。主曳引绳4卷挂在与卷扬机7连接的牵引绳轮7a上。在这样的结构中,卷扬机7旋转驱动牵引绳轮7a,主曳引绳4被卷起,电梯轿厢3和平衡配重5分别升降。在升降通道2内设有沿上下方向d1延伸的一对轿厢导轨8、8以及一对配重导轨(未图示)。电梯轿厢3和平衡配重5分别沿着轿厢导轨8、8和配重导轨移动。另外,在卷扬机7上设置有电磁制动器9作为主制动器。另外,作为辅助制动器,在电梯轿厢3的上部和下部设有涡电流式制动装置10。并且,电梯装置1具备控制电梯装置1的各部的控制装置(未图示)。
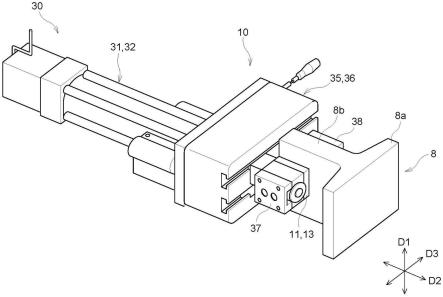
11.下面,参照图2~图6b说明涡电流式制动装置10。图2是涡电流式制动装置10的立体图。图3~图5是示意性地表示涡电流式制动装置10的图。图6a是表示沿着图5的涡电流式制动装置10的a-a线的剖面的图。另外,图6b是表示图6a所示的磁铁单元11、12的磁通线的图。
12.如图2~图5所示,涡电流式制动装置10具备一对磁铁单元11、12、安装于各磁铁单元11、12的低摩擦垫20、使磁铁单元11、12对于轿厢导轨8相对移动的动作机构30。如图6a所示,各磁铁单元11、12具有至少一个磁铁13、14。
13.动作机构30使一对磁铁单元11、12在接近对应的轿厢导轨8而使制动器动作的动作位置(参照图2及图5)和比动作位置远离轿厢导轨8的非动作位置(参照图3)之间移动。如图5所示,当磁铁单元11、12配置在动作位置时,一对磁铁单元11、12位于对应的轿厢导轨8
的两侧。在图示的例子中,轿厢导轨8具有基部8a和从基部8a向电梯轿厢3侧延伸的导轨翼片8b。而且,当磁铁单元11、12配置于动作位置时,一对磁铁单元11、12位于轿厢导轨8的导轨翼片8b的两侧。
14.如图5所示,在磁铁单元11、12配置在动作位置时,各磁铁单元11、12以该磁铁13、14经由低摩擦垫20与轿厢导轨8、8相对的方式保持于动作机构30。
15.在图示的例子中,在使涡电流式制动装置10的制动动作时,动作机构30使一对磁铁单元11、12从图3所示的非动作位置经由图4所示的中间位置移动到图5所示的动作位置。具体而言,动作机构30具有沿着从电梯轿厢3朝向对应的轿厢导轨8的方向d2进行伸缩的伸缩机构31、以及使磁铁单元11、12在轿厢导轨8的宽度方向d3上滑动的滑动机构35。在图示的例子中,方向d1、d2、d3相互正交。
16.伸缩机构31例如包括能够沿方向d2伸缩地配置的缸臂32、以及使缸臂32伸缩的致动器(未图示)。当从电梯装置1的控制装置向动作机构30输入使辅助制动器动作的信号时,伸缩机构31的致动器动作,使缸臂32伸长。另外,当从电梯装置1的控制装置向动作机构30输入使辅助制动器的动作解除的信号时,伸缩机构31的致动器动作,使缸臂32收缩。
17.滑动机构35包括框架36、能够相对于框架36沿方向d3滑动地设置的一对滑块37、38、使各滑块37、38移动的致动器(未图示)。磁铁单元11的磁铁13固定在滑块37上。另外,磁铁单元12的磁铁14固定在滑块38上。当从电梯装置1的控制装置向动作机构30输入使辅助制动器动作的信号时,滑动机构35的致动器动作,使滑块37、38相互接近。另外,当从电梯装置1的控制装置向动作机构30输入使辅助制动器的动作解除的信号时,滑动机构35的致动器动作,使滑块37、38相互离开。
18.此外,在图示的例子中,滑动机构35的滑块37、38由强磁性体构成。这样的滑块37、38作为磁铁单元11、12的后磁轭发挥作用,能够抑制磁铁单元11、12的磁力降低。作为构成滑块37、38的强磁性体,例如能够采用铁、钴及铁钴合金。
19.在图示的例子中,如图6a所示,各磁铁单元11、12包括沿上下方向排列的4个磁铁13a、13b、13c、13d;14a、14b、14c、14d。在一对磁铁单元11、12位于动作位置时,一对磁铁单元11、12的磁极的配置以沿上下方向的轴线为中心呈镜面对称。在图6a所示的例子中,各磁铁单元11、12的多个磁铁13a、13b、13c、13d;14a、14b、14c、14d以海尔贝克排列的方式排列。在该情况下,配置在动作位置的磁铁单元11、12的磁通线如图6b所示。在图6b所示的例子中,各磁铁单元11、12的磁通线不从一对磁铁单元11、12的一方朝向另一方贯通d轿厢导轨8。但是,作为多个磁铁13a、13b、13c、13d;14a、14b、14c、14d的排列方法,并不限于此。即,多个磁铁13a、13b、13c、13d;14a、14b、14c、14d的排列也可以决定为,在磁铁单元11、12配置于动作位置时,各磁铁单元11、12的磁通线从一对磁铁单元11、12的一方朝向另一方贯通轿厢导轨8。
20.低摩擦垫20安装于各磁铁单元11、12。如图6a所示,低摩擦垫20覆盖磁铁单元11、12的磁铁13、14的至少一部分,以便在磁铁单元11、12位于动作位置时位于磁铁单元11、12的磁铁13、14与轿厢导轨8的导轨翼片8b之间。低摩擦垫20由摩擦系数低的材料制成。通过将这样的低摩擦垫20配置在处于动作位置的磁铁单元11、12和轿厢导轨8之间,能够抑制磁铁单元11、12的磁铁13、14吸附于轿厢导轨8,在轿厢导轨8和沿上下方向移动的磁铁单元11、12之间产生摩擦力而损伤轿厢导轨8的可能性。优选地,低摩擦垫20由具有耐磨性的材
料制成。具体而言,作为形成低摩擦垫20的材料,通常能够采用与安装在电梯装置的各种导块上的低摩擦垫相同的材料。由这样的材料形成的低摩擦垫20的摩擦系数低,滑动性优异,耐磨损性也优异。
21.此外,如果低摩擦垫20的厚度过大,则有可能无法使磁铁单元11、12与轿厢导轨8充分接近,无法充分得到磁铁单元11、12所产生的制动力。另一方面,如果低摩擦垫20的厚度过小,则磁铁单元11、12的磁铁13、14吸附于轿厢导轨8,有可能损伤轿厢导轨8。从这样的观点出发,低摩擦垫20的厚度优选为2mm~30mm,更优选为2mm~10mm。通过使低摩擦垫20的厚度为2mm~30mm、更优选为2mm~10mm,能够不损伤轿厢导轨8地得到制动力。
22.下面,对涡电流式制动装置10的动作进行说明。
23.首先,在从电梯装置1的控制装置向动作机构30输入使辅助制动器动作的信号之前,涡电流式制动装置10的一对磁铁单元11、12位于图3所示的非动作位置。此时,涡电流式制动装置10的制动不动作。
24.当从电梯装置1的控制装置向动作机构30输入使辅助制动器动作的信号时,动作机构30使一对磁铁单元11、12从图3所示的非动作位置移动到图4所示的中间位置。具体而言,伸缩机构31的致动器动作,使缸臂32沿着从电梯轿厢3朝向对应的轿厢导轨8的方向d2伸长。由此,一对磁铁单元11、12位于对应的轿厢导轨8的两侧。
25.接着,动作机构30使一对磁铁单元11、12从图4所示的中间位置移动到图5所示的动作位置。具体而言,滑动机构35的致动器动作,使滑块37、38相互接近。由此,磁铁单元11、12被配置成接近轿厢导轨8的导轨翼片8b。在图示的例子中,磁铁单元11、12经由低摩擦垫20与导轨翼片8b接触。如果沿上下方向移动的磁铁单元11、12被配置成接近轿厢导轨8,则在轿厢导轨8内激励涡电流。由此,在一对磁铁单元11、12与轿厢导轨8之间产生电磁相互作用,涡电流式制动装置10的制动动作。其结果,阻止电梯轿厢3相对于轿厢导轨8的移动。在图示的例子中,由于能够通过动作机构30使磁铁单元11、12充分地接近轿厢导轨8,所以能够将磁铁单元11、12的制动力作为辅助制动器而成为充分的大小。
26.另一方面,当从电梯装置1的控制装置向动作机构30输入使辅助制动器的动作解除的信号时,动作机构30使一对磁铁单元11、12从图5所示的动作位置移动到图4所示的中间位置。具体而言,滑动机构35的致动器动作,使滑块37、38相互离开。由此,磁铁单元11、12在轿厢导轨8的宽度方向d3上从轿厢导轨8离开。
27.接着,动作机构30使一对磁铁单元11、12从图4所示的中间位置移动到图3所示的非动作位置。具体而言,伸缩机构31的致动器动作而使缸臂32收缩。由此,磁铁单元11、12被配置成充分地离开轿厢导轨8,从而解除涡电流式制动装置10的制动。
28.此外,在图3~图5所示的例子中,动作机构30在使一对磁铁单元11、12从非动作位置移动到动作位置时,使磁铁单元11、12沿着从电梯轿厢3朝向对应的轿厢导轨8的方向d2移动后在轿厢导轨8的宽度方向d3上移动,但不限于此。也可以是,动作机构30在使一对磁铁单元11、12从非动作位置移动到动作位置时,使磁铁单元11、12在轿厢导轨8的宽度方向d3上移动后沿着从电梯轿厢3朝向对应的轿厢导轨8的方向d2移动。即,也可以动作机构30在使一对磁铁单元11、12从非动作位置移动到动作位置时,在使滑动机构35动作后使伸缩机构31动作。
29.同样,也可以动作机构30在使一对磁铁单元11、12从动作位置移动到非动作位置
时,在使一对磁铁单元11、12沿着从电梯轿厢3朝向对应的轿厢导轨8的方向d2移动后,使磁铁单元11、12在轿厢导轨8的宽度方向d3上移动。即,也可以动作机构30在使一对磁铁单元11、12从动作位置移动到非动作位置时,在使伸缩机构31动作后使滑动机构35动作。
30.此外,还可以对于上述的一个实施方式进行各种变更。
31.《变形例1》例如,如图7所示,涡电流式制动装置10也可以具备辊25来代替低摩擦垫20。在这种情况下,如图7所示,辊25以在磁铁单元11、12位于动作位置时在导轨8上滚动的方式安装于磁铁单元11、12。通过这样的辊25,也能够抑制处于动作位置的磁铁单元11、12的磁铁13、14吸附于轿厢导轨8的可能性,并且,能够抑制在轿厢导轨8和磁铁单元11、12之间产生摩擦力而损伤轿厢导轨8的可能性。
32.(变形例2)另外,如图8所示,涡电流式制动装置10也可以构成为在轿厢导轨8的一侧配置多个磁铁单元11、11,在轿厢导轨8的另一侧配置多个磁铁单元12、12。在图8所示的例子中,包含4个磁铁13a、13b、13c、13d的磁铁单元11有两个,且固定在滑动机构35的滑块37上。另外,包含4个磁铁14a、14b、14c、14d的磁铁单元12有两个,且固定在滑动机构35的滑块38上。一方的磁铁单元11的多个磁铁13a、13b、13c、13d的磁极的配置和另一方的磁铁单元11的多个磁铁13a、13b、13c、13d的磁极的配置彼此相同。另外,一方的磁铁单元12的多个磁铁14a、14b、14c、14d的磁极的配置和另一方的磁铁单元12的多个磁铁14a、14b、14c、14d的磁极的配置彼此相同。
33.当然,涡电流式制动装置10也可以构成为仅在轿厢导轨8的一侧配置磁铁单元11或12。换言之,涡电流式制动装置10也可以不包括磁铁单元12或11。在这种情况下,也能够在磁铁单元11或12与轿厢导轨8之间产生电磁相互作用,使涡电流式制动装置10的制动动作。
34.(变形例3)另外,涡电流式制动装置10不限于包含图2所示的动作机构30的装置。例如,涡电流式制动装置10也可以包括图9a~图11b所示的动作机构40。在图9a~图11b所示的例子中,动作机构40包括连杆机构41、48和使连杆机构41、48动作的致动器50。此外,在图9a~图11b以及后面参照的图11c和图11d中,省略了低摩擦垫20的图示。
35.各连杆机构41、48包括沿上下方向延伸的基构件42和配置在比基构件42靠轿厢导轨8侧的可动构件43。在各可动构件43上固定有磁铁单元11或12。基构件42的下端和可动构件43的下端分别可转动地与转动构件44的一端和另一端连接。另外,基构件42的上端和可动构件43的上端分别可转动地与转动构件45的一端和另一端连接。这样的连杆机构41、48能够从图9a及图9b所示的折叠状态变化到图10a及图10b所示的展开状态,并且,能够从展开状态变化到折叠状态。
36.各基构件42具有旋转机构46。通过比较图10b及图11b可知,旋转机构46允许连杆机构41、48的基构件42、42分别绕沿上下方向d1延伸的轴线x1、x3旋转。由此,连杆机构41、48能够变更相对于该轿厢导轨8的角度,使可动构件43、43接近轿厢导轨8。另外,可动构件43具有旋转机构47。通过比较图10b及图11b可知,旋转机构47允许可动构件43、43分别绕沿上下方向d1延伸的轴线x2、x4旋转。由此,可动构件43能够变更可动构件43相对于轿厢导轨
8的角度,将固定于可动构件43的磁铁单元11、12的磁铁13、14与轿厢导轨8的导轨翼片8b的表面平行地配置。
37.在从电梯装置1的控制装置向动作机构40输入使辅助制动器动作的信号之前,致动器50与连杆机构41、48的可动构件43、43连接,将连杆机构41、48维持在折叠状态。另外,当从电梯装置1的控制装置向动作机构40输入使辅助制动器动作的信号时,致动器50解除与连杆机构41、48的可动构件43、43的连接,使连杆机构41、48变化到展开状态。
38.对具有动作机构40的涡电流式制动装置10的动作进行说明。
39.首先,在从电梯装置1的控制装置向动作机构40输入使辅助制动器动作的信号之前,致动器50与连杆机构41、48的可动构件43、43连接,将连杆机构41、48维持在折叠状态。由此,涡电流式制动装置10的一对磁铁单元11、12位于图9a和图9b所示的非动作位置。此时,涡电流式制动装置10的制动不动作。
40.当从电梯装置1的控制装置向动作机构40输入使辅助制动器动作的信号时,动作机构40使一对磁铁单元11、12从图9a及图9b所示的非动作位置移动到图10a及图10b所示的中间位置。具体而言,致动器50动作,解除与连杆机构41、48的可动构件43、43的连接,连杆机构41、48成为展开状态。由此,一对磁铁单元11、12位于对应的轿厢导轨8的两侧。
41.接着,动作机构40使一对磁铁单元11、12从图10a及图10b所示的中间位置移动到图11a及图11b所示的动作位置。具体而言,通过磁铁单元11、12的磁铁13、14朝向导轨8的吸附力和旋转机构46,连杆机构41、48的基构件42、42分别绕轴线x1、x3旋转,使可动构件43、43接近轿厢导轨8。另外,通过磁铁单元11、12的磁铁13、14朝向导轨8的吸附力和旋转机构47,可动构件43、43分别绕轴线x2、x4旋转,固定于可动构件43的磁铁单元11、12的磁铁13、14与轿厢导轨8的导轨翼片8b的表面平行地配置。由此,磁铁单元11、12经由低摩擦垫20与导轨翼片8b接触。并且,在一对磁铁单元11、12与轿厢导轨8之间产生电磁相互作用,涡电流式制动装置10的制动动作。其结果,阻止电梯轿厢3的移动。
42.在图9a~图11b所示的例子中,磁铁单元11、12从动作位置向非动作位置的移动是由进行电梯装置1的维修、检查作业的人员通过手工作业来进行的。
43.此外,在图9a~图11b所示的例子中,可动构件43具有旋转机构47,但不限于此。如图11c及图11d所示,可动构件43也可以形成为,在连杆机构41、48绕轴线x1、x3旋转之后,固定该磁铁单元11、12的面与轿厢导轨8的导轨翼片8b的表面平行。在这种情况下,即使可动构件43不具有旋转机构47,也能够将磁铁单元11、12的磁铁13、14与轿厢导轨8的导轨翼片8b的表面平行地配置。
44.(变形例4)另外,涡电流式制动装置10也可以包括图12a~图13b所示的动作机构60。在图12a~图13b所示的例子中,动作机构60包括连杆机构61、62和使连杆机构61、62动作的致动器50。另外,连杆机构61、62与图9a~图11b所示的连杆机构41、48同样,包括基构件42、可动构件43和转动构件44、45。在图12a~图13b所示的例子中,基构件42不具有旋转机构46。另外,可动构件43不具有旋转机构47。取而代之,动作机构60能够使连杆机构61、62在轿厢导轨8的宽度方向d3上滑动。具体而言,动作机构60具有沿方向d3延伸的支承构件63。支承构件63插通于设置在连杆机构61、62的各基构件42、42上的开口中。由此,各基构件42、42能够沿着方向d3在支承构件63上移动。此外,在图12a~图13b中,省略了低摩擦垫20的图示。
45.对具备动作机构60的涡电流式制动装置10的动作进行说明。
46.首先,在从电梯装置1的控制装置向动作机构60输入使辅助制动器动作的信号之前,致动器50与连杆机构41、48的可动构件43、43连接,将连杆机构41、48维持在折叠状态。由此,涡电流式制动装置10的一对磁铁单元11、12处于与图9a和图9b所示的位置相同的非动作位置。此时,涡电流式制动装置10的制动不动作。
47.当从电梯装置1的控制装置向动作机构60输入使辅助制动器动作的信号时,动作机构60使一对磁铁单元11、12从非动作位置移动到图12a及图12b所示的中间位置。具体而言,致动器50动作,解除与连杆机构41、48的可动构件43、43的连接,连杆机构41、48成为展开状态。由此,一对磁铁单元11、12位于对应的轿厢导轨8的两侧。
48.接着,动作机构60使一对磁铁单元11、12从图12a及图12b所示的中间位置移动到图13a及图13b所示的动作位置。具体而言,通过磁铁单元11、12的磁铁13、14朝向导轨8的吸附力,连杆机构41、48的基构件42、42沿着方向d3在支承构件63上移动。由此,磁铁单元11、12经由低摩擦垫20与导轨翼片8b接触。并且,在一对磁铁单元11、12与轿厢导轨8之间产生电磁相互作用,涡电流式制动装置10的制动动作。其结果,阻止电梯轿厢3的移动。
49.在图12a~图13b所示的例子中,磁铁单元11、12从动作位置向非动作位置的移动是由进行电梯装置1的维修、检查作业的人员通过手工作业来进行的。
50.(另一变形例)在图6a所示的例子中,磁铁单元11、12的多个磁铁13a、13b、13c、13d;14a、14b、14c、14d以海尔贝克排列的方式排列,但不限于此。作为多个磁铁13、14的排列,只要是能够在轿厢导轨8和沿着轿厢导轨8移动的磁铁单元11、12之间产生电磁相互作用的排列,就可以采用任意的排列。例如,也可以如图14所示,当磁铁单元11、12配置在动作位置时,n极朝向导轨翼片8b侧的磁铁13、14和s极朝向导轨翼片8b侧的磁铁13、14交替配置。另外,也可以如图15所示,多个磁铁13、14沿上下方向隔开间隔地排列。在这种情况下,多个磁铁13a、13b、13c;14a、14b、14c也可以被配置成在磁铁单元11、12配置于动作位置时,相同的极(在图示的例子中为n极)朝向导轨翼片8b的一侧。在图15所示的例子中,在多个磁铁13a、13b、13c;14a、14b、14c之间配置有隔板16。
51.另外,磁铁单元11、12也可以不包含多个磁铁13、14,也可以仅包含一个磁铁13、14。
52.另外,在图示的例子中,涡电流式制动装置10安装在电梯轿厢3上,但不限于此。涡电流式制动装置10也可以安装在平衡配重5上。在这种情况下,涡电流式制动装置10可以通过其磁铁单元11、12与配重导轨之间产生电磁相互作用,从而使制动功能动作。
53.另外,在图3~图5所示的例子中,动作机构30的滑动机构35通过致动器使滑块37、38移动,但不限于此。滑动机构35也可以构成为通过磁铁单元11、12的磁铁13、14朝向导轨8的吸附力使滑块37、38向轿厢导轨8移动。在这种情况下,磁铁单元11、12从动作位置向非动作位置的移动是由进行电梯装置1的维修、检查作业的人员通过手工作业来进行的。
54.另外,在图6a所示的例子中,为了抑制磁铁单元11、12的磁力降低,滑动机构35的滑块37、38由强磁性体构成,但不限于此。也可以如图16~17所示,通过在磁铁13、14与滑块37、38之间配置作为后磁轭发挥功能的强磁性体39,从而抑制磁铁单元11、12的磁力降低。
55.根据上述的一个实施方式及其变形例,涡电流式制动装置10是安装在沿导轨8移
动的电梯轿厢3或平衡配重5上的涡电流式制动装置,具有磁铁单元11、12和动作机构30、40、60,该导轨沿着上下方向延伸。磁铁单元11、12包括至少一个磁铁13、14。动作机构30、40、60使磁铁单元11、12在接近导轨8而使制动器动作的动作位置和比动作位置远离导轨8的非动作位置之间移动。由此,能够使磁铁单元11、12的磁铁13、14充分接近导轨8,能够使涡电流式制动装置10的制动力足够大。
56.另外,根据上述的一个实施方式及其变形例,涡电流式制动装置10还具有在磁铁单元11、12位于动作位置时位于磁铁单元11、12的磁铁13、14与导轨8之间的低摩擦垫20。在这种情况下,能够抑制处于动作位置的磁铁单元11、12的磁铁13、14吸附于轿厢导轨8的可能性,并且,能够抑制在磁铁单元11、12和轿厢导轨8之间产生摩擦力而损伤轿厢导轨8的可能性。
57.另外,根据上述的变形例1,涡电流式制动装置10还具有安装在磁铁单元11、12上的辊25,以便在磁铁单元11、12位于动作位置时在导轨8上滚动。在这种情况下,也能够抑制处于动作位置的磁铁单元11、12的磁铁13、14吸附于轿厢导轨8的可能性,并且,能够抑制在磁铁单元11、12和轿厢导轨8之间产生摩擦力而损伤轿厢导轨8的可能性。
58.另外,在上述的一个实施方式及其变形例中,磁铁单元11、12包括沿上下方向排列的多个磁铁13a、13b、13c、13d;14a、14b、14c、14d。多个磁铁13a、13b、13c、13d;14a、14b、14c、14d以海尔贝克排列的方式排列。在这种情况下,能够以使配置于动作位置的磁铁单元11、12的磁通线不贯通导轨8的方式构成磁铁单元11、12。
59.另外,根据上述的一个实施方式及其变形例,涡电流式制动装置10具备分别包含至少一个磁铁13、14的一对磁铁单元11、12。动作机构30、40、60使一对磁铁单元11、12在接近导轨8而使制动器动作的动作位置和比动作位置远离导轨8的非动作位置之间移动。在动作位置,一对磁铁单元11、12位于导轨8的两侧。在这种情况下,能够在各磁铁单元11、12和导轨8之间产生电磁相互作用,能够提高涡电流式制动装置10的制动功能。
60.另外,根据上述的一个实施方式及其变形例,一对磁铁单元11、12包括分别沿上下方向排列的多个磁铁13a、13b、13c、13d;14a、14b、14c、14d。在一对磁铁单元11、12位于动作位置时,一对磁铁单元11、12的磁极的配置以沿上下方向的轴线为中心呈镜面对称。在这种情况下,能够提高涡电流式制动装置10的制动功能。
61.虽然说明了本发明的若干实施方式和变形例,但这些实施方式和变形例是作为例子而提出的,并不意图限定发明的范围。这些新的实施方式和变形例可以以其他各种方式来实施,在不脱离发明的主旨的范围内,可以进行各种省略、置换、变更。这些实施方式或其变形包含在发明的范围、主旨中,并且包含在与权利要求所记载的发明等同的范围中。另外,当然也可以在本发明的主旨的范围内将这些实施方式和变形例部分地适当组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1