一种自动化生产线机器人输送系统的制作方法
1.本发明涉及运输装置技术领域,尤其涉及一种自动化生产线机器人输送系统。
背景技术:
2.目前的自动化生产线机器人输送系统,不便于工作人员将零件输送到较高位置,需要工作人员手动进行搬运,导致工作人员劳动强度大。
3.现有技术通过底板、外壳一、外壳二、横板、方块、滑杆三、升降结构和驱动结构的配合,使得该装置在使用时,可以通过电机带动圆板转动,圆板带动斜杆移动,斜杆带动直板移动,直板带动直块移动,直块带动齿板转动,齿板带动齿条移动,齿条带动方块移动,方块带动横板移动,进而便于工作人员将零件输送到较高位置,降低工作人员劳动强度。
4.但现有技术的输送系统角度固定,不能对不同方位的物品进行夹持后进行运输,导致适用范围窄。
技术实现要素:
5.本发明的目的在于提供一种自动化生产线机器人输送系统,解决了输送系统角度固定,不能对不同方位的物品进行夹持后进行运输,导致适用范围窄的技术问题。
6.为实现上述目的,本发明提供了一种自动化生产线机器人输送系统,包括前进底座和升降装置,
7.还包括运输装置;
8.所述运输装置包括转向竖杆、转向座、转向电机、转向带、升降滑块和夹紧组件,所述转向竖杆与所述前进底座转动连接,并位于所述前进底座的一侧,所述转向座与所述转向竖杆固定连接,并位于所述转向竖杆靠近所述前进底座的一侧,所述转向电机与所述前进底座固定连接,并位于所述前进底座靠近所述转向竖杆的一侧,所述转向带的一端套设在所述转向竖杆上,所述转向带的另一端套设在所述转向电机的输出端上,所述转向带位于所述转向竖杆靠近所述转向电机的一侧,所述升降滑块与所述转向座通过所述升降装置连接,并位于所述转向座靠近所述转向竖杆的一侧,所述升降装置驱动所述升降滑块进行升降,所述夹紧组件设置在所述升降滑块上,并对物品进行夹紧。
9.其中,所述夹紧组件包括固定座、夹紧座和移动构件,所述固定座与所述升降滑块固定连接,并位于所述升降滑块靠近所述转向座的一侧;所述夹紧座与所述升降滑块滑动连接,并位于所述升降滑块靠近所述固定座的一侧;所述移动构件驱动所述夹紧座移动。
10.其中,所述移动构件包括夹紧气缸和夹紧杆,所述夹紧气缸与所述升降滑块固定连接,并位于所述升降滑块靠近所述夹紧座的一侧;所述夹紧杆与所述夹紧座固定连接,并与所述夹紧气缸的输出端连接,且位于所述夹紧座靠近所述夹紧气缸的一侧。
11.其中,所述升降装置包括升降导轨、控制组件和导向组件,所述升降导轨与所述转向座固定连接,并与所述升降滑块滑动连接,且位于所述转向座靠近所述升降滑块的一侧;所述控制组件控制所述升降滑块进行升降;所述导向组件对所述升降滑块进行导向。
12.其中,所述控制组件包括控制液压缸和控制连杆,所述控制液压缸与所述升降导轨固定连接,并位于所述升降导轨靠近所述升降滑块的一侧;所述控制连杆与所述升降滑块固定连接,并与所述控制液压缸的输出端连接,且位于所述升降滑块靠近所述控制液压缸的一侧。
13.其中,所述自动化生产线机器人输送系统还包括前进装置,所述前进装置驱动所述前进底座前进。
14.其中,所述前进装置包括前进滚轮和驱动组件,所述前进滚轮与所述前进底座通过所述驱动组件转动连接,并位于所述前进底座靠近所述转向竖杆的一侧;所述驱动组件驱动所述前进滚轮转动。
15.本发明的一种自动化生产线机器人输送系统,通过所述转向电机的工作,带动所述转向带转动,同步带动所述转向竖杆在所述前进底座上进行转动,从而使所述转向座进行转动,进而使所述升降滑块的方向进行调节,进一步通过所述夹紧组件的工作,使物品夹紧在所述升降滑块上,通过所述升降装置的工作,使所述升降滑块带动物品进行升降,从而可对不同方位的物品进行运输,进而提高适用范围。
附图说明
16.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。
17.图1是本发明第一实施例的自动化生产线机器人输送系统的整体结构示意图。
18.图2是本发明第一实施例的自动化生产线机器人输送系统的右视图。
19.图3是本发明第二实施例的自动化生产线机器人输送系统的整体结构示意图。
20.图4是本发明第二实施例的自动化生产线机器人输送系统的右视图。
21.图5是本发明第三实施例的自动化生产线机器人输送系统的整体结构示意图。
22.图6是本发明第三实施例的自动化生产线机器人输送系统的右视图。
23.图中:101-前进底座、102-转向竖杆、103-转向座、104-转向电机、105-转向带、106-升降滑块、107-固定座、108-夹紧座、109-夹紧气缸、110-夹紧杆、201-升降导轨、202-控制液压缸、203-控制连杆、204-导向杆、205-限位顶块、301-前进滚轮、302-驱动马达、302-前进轴杆。
具体实施方式
24.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
25.本技术第一实施例为:
26.请参阅图1和图2,其中图1是本发明第一实施例的自动化生产线机器人输送系统的整体结构示意图,图2是本发明第一实施例的自动化生产线机器人输送系统的右视图。本发明提供一种自动化生产线机器人输送系统:包括前进底座101、升降装置和运输装置,所述运输装置包括转向竖杆102、转向座103、转向电机104、转向带105、升降滑块106和夹紧组件,所述夹紧组件包括固定座107、夹紧座108和移动构件,所述移动构件包括夹紧气缸109和夹紧杆110。
27.针对本具体实施方式,所述前进底座101为矩形座,所述前进底座101用于安装所述运输装置。
28.其中,所述转向竖杆102与所述前进底座101转动连接,并位于所述前进底座101的一侧,所述转向座103与所述转向竖杆102固定连接,并位于所述转向竖杆102靠近所述前进底座101的一侧,所述转向电机104与所述前进底座101固定连接,并位于所述前进底座101靠近所述转向竖杆102的一侧,所述转向带105的一端套设在所述转向竖杆102上,所述转向带105的另一端套设在所述转向电机104的输出端上,所述转向带105位于所述转向竖杆102靠近所述转向电机104的一侧,所述升降滑块106与所述转向座103通过所述升降装置连接,并位于所述转向座103靠近所述转向竖杆102的一侧,所述升降装置驱动所述升降滑块106进行升降,所述夹紧组件设置在所述升降滑块106上,并对物品进行夹紧。所述转向竖杆102为圆柱杆,所述转向竖杆102与所述前进底座101通过轴承转动连接,并竖直安装在所述前进底座101的上方,所述转向座103为圆形座,所述转向座103固定安装在所述转向竖杆102的上方,所述转向电机104由电机本体、输出轴杆和输出套构成,所述转向电机104固定安装在所述前进底座101上方,所述转向带105为环状,所述转向带105的一端套设在所述转向竖杆102上,所述转向带105的另一端套设在所述转向电机104的输出套上,所述升降滑块106为具有圆形通孔的矩形块,所述升降滑块106与所述转向座103通过所述升降装置连接,并安装在所述转向座103的上方,所述升降装置驱动所述升降滑块106上下升降,所述夹紧组件对物品进行夹紧,通过所述转向电机104的工作,带动所述转向带105转动,同步带动所述转向竖杆102在所述前进底座101上进行转动,从而使所述转向座103进行转动,进而使所述升降滑块106的方向进行调节,进一步通过所述夹紧组件的工作,使物品夹紧在所述升降滑块106上,通过所述升降装置的工作,使所述升降滑块106带动物品进行升降,从而可对不同方位的物品进行运输,进而提高适用范围。
29.其次,所述固定座107与所述升降滑块106固定连接,并位于所述升降滑块106靠近所述转向座103的一侧;所述夹紧座108与所述升降滑块106滑动连接,并位于所述升降滑块106靠近所述固定座107的一侧;所述移动构件驱动所述夹紧座108移动。所述固定座107为u形座,所述固定座107固定安装在所述升降滑块106的左侧,所述夹紧座108为u形座,所述夹紧座108与所述升降滑块106通过内部的滚轮滑动连接,并安装在所述升降滑块106的右侧,所述移动构件驱动所述夹紧座108横向移动,通过所述夹紧座108的横向移动,使所述夹紧座108与所述固定座107之间的间距进行调节,从而对物品进行夹紧。
30.同时,所述夹紧气缸109与所述升降滑块106固定连接,并位于所述升降滑块106靠近所述夹紧座108的一侧;所述夹紧杆110与所述夹紧座108固定连接,并与所述夹紧气缸109的输出端连接,且位于所述夹紧座108靠近所述夹紧气缸109的一侧。所述夹紧气缸109为直线往复气缸,所述夹紧气缸109固定安装在所述升降滑块106的右侧,所述夹紧杆110为可横向移动的圆柱杆,所述夹紧杆110的左端与所述夹紧座108固定连接,所述夹紧杆110的右端与所述夹紧气缸109内部的往复活塞固定连接,通过所述夹紧气缸109的往复运动,带动所述夹紧杆110横向移动,从而带动所述夹紧座108横向移动。
31.使用本实施例的一种自动化生产线机器人输送系统时,通过所述转向电机104的工作,带动所述转向带105转动,同步带动所述转向竖杆102在所述前进底座101上进行转动,从而使所述转向座103进行转动,进而使所述升降滑块106的方向进行调节,进一步通过
所述夹紧气缸109的往复运动,带动所述夹紧杆110横向移动,从而带动所述夹紧座108横向移动,使所述夹紧座108与所述固定座107之间的间距进行调节,进而使物品夹紧在所述升降滑块106上,通过所述升降装置的工作,使所述升降滑块106带动物品进行升降,从而可对不同方位的物品进行运输,进而提高适用范围。
32.本技术第二实施例为:
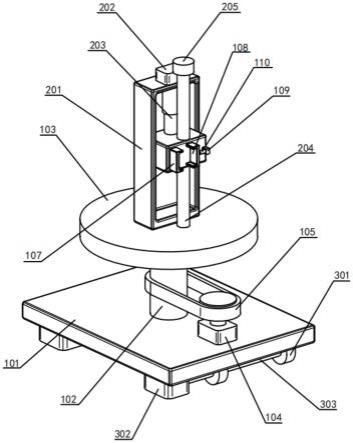
33.在第一实施例的基础上,请参阅图3和图4,其中图3是本发明第二实施例的自动化生产线机器人输送系统的整体结构示意图,图4是本发明第二实施例的自动化生产线机器人输送系统的右视图。所述升降装置包括升降导轨201、控制组件和导向组件,所述控制组件包括控制液压缸202和控制连杆203,所述导向组件包括导向杆204和限位顶块205。
34.针对本具体实施方式,所述升降装置驱动所述升降滑块106进行升降,从而将物品运至不同高度。
35.其中,所述升降导轨201与所述转向座103固定连接,并与所述升降滑块106滑动连接,且位于所述转向座103靠近所述升降滑块106的一侧;所述控制组件控制所述升降滑块106进行升降;所述导向组件对所述升降滑块106进行导向。所述升降导轨201为具有矩形升降槽的矩形导轨,所述升降导轨201与所述转向座103固定连接,并竖直安装在所述转向座103的上方,所述升降滑块106与所述升降导轨201通过内部的滚轮滑动连接,并位于所述升降导轨201的矩形升降槽内,所述控制组件控制所述升降滑块106进行升降,通过所述控制组件的工作,使所述升降滑块106在所述升降导轨201内滑动,从而使物品运至不同高度。
36.其次,所述控制液压缸202与所述升降导轨201固定连接,并位于所述升降导轨201靠近所述升降滑块106的一侧;所述控制连杆203与所述升降滑块106固定连接,并与所述控制液压缸202的输出端连接,且位于所述升降滑块106靠近所述控制液压缸202的一侧。所述控制液压缸202为直线液压缸,所述控制液压缸202固定安装在所述升降导轨201的顶端,所述控制连杆203为竖向设置的圆柱杆,所述控制连杆203的底端与所述升降滑块106固定连接,所述控制连杆203的顶端与所述控制液压缸202的输出端固定连接,通过所述控制液压缸202的往复运动,使所述控制连杆203上下移动,从而使所述升降滑块106上下升降。
37.同时,所述导向杆204与所述转向座103固定连接,并与所述升降滑块106滑动连接,且位于所述转向座103靠近所述升降滑块106的一侧;所述限位顶块205与所述导向杆204固定连接,并位于所述导向杆204靠近所述升降滑块106的一侧。所述导向杆204为圆柱杆,所述导向杆204的直径与所述升降滑块106的圆形通孔的直径相等,所述导向杆204固定安装在所述转向座103上,并通过圆形通孔贯穿所述升降滑块106,且与所述升降滑块106通过外表面滑动连接,所述限位顶块205为圆形块,所述限位顶块205的直径大于所述导向杆204的直径,并同轴设置在所述导向杆204的顶端,通过所述导向杆204的导向作用,使所述升降滑块106升降的方向不易偏移,进一步通过所述限位顶块205的限位作用,避免所述升降滑块106滑出所述导向杆204。
38.使用本实施例的一种自动化生产线机器人输送系统时,通过所述控制液压缸202的往复运动,使所述控制连杆203上下移动,从而使所述升降滑块106上下升降,进而使物品运至不同高度,通过所述导向杆204的导向作用,使所述升降滑块106升降的方向不易偏移,进一步通过所述限位顶块205的限位作用,避免所述升降滑块106滑出所述导向杆204。
39.本技术第三实施例为:
40.在第一实施例的基础上,请参阅图5和图6,其中图5是本发明第三实施例的自动化生产线机器人输送系统的整体结构示意图,图6是本发明第三实施例的自动化生产线机器人输送系统的右视图。本发明提供一种所述自动化生产线机器人输送系统还包括前进装置,所述前进装置包括前进滚轮301和驱动组件,所述驱动组件包括驱动马达302和前进轴杆303。
41.针对本具体实施方式,所述前进装置驱动所述前进底座101前进。使所述前进底座101的移动更方便。
42.其中,所述前进滚轮301与所述前进底座101通过所述驱动组件转动连接,并位于所述前进底座101靠近所述转向竖杆102的一侧;所述驱动组件驱动所述前进滚轮301转动。所述前进滚轮301为圆形滚轮,所述前进滚轮301的数量为四个,并与所述前进底座101通过所述驱动组件转动连接,且安装在所述前进底座101的下方,所述驱动组件驱动所述前进滚轮301转动,从而带动所述前进底座101进行移动,进而使所述自动化生产线机器人输送系统整体进行移动。
43.其次,所述驱动马达302与所述前进底座101固定连接,并位于所述前进底座101靠近所述前进滚轮301的一侧;所述前进轴杆303与所述前进滚轮301固定连接,并与所述驱动马达302的输出端连接,且位于所述前进滚轮301靠近所述驱动马达302的一侧。所述驱动马达302为旋转马达,所述驱动轴杆固定安装在所述前进底座101的下方,所述前进轴杆303为圆柱杆,所述前进轴杆303与所述前进滚轮301通过螺栓固定,并与所述驱动马达302内的转子固定连接,通过所述驱动马达302的工作,使所述前进轴杆303进行转动,从而带动所述前进滚轮301转动。
44.使用本实施例的一种自动化生产线机器人输送系统时,通过所述驱动马达302的工作,使所述前进轴杆303进行转动,从而带动所述前进滚轮301转动,进而带动所述前进底座101进行移动,进一步使所述自动化生产线机器人输送系统整体进行移动。
45.以上所揭露的仅为本技术一种或多种较佳实施例而已,不能以此来限定本技术之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本技术权利要求所作的等同变化,仍属于本技术所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1