一种带AI识别的行车自动上料系统的制作方法
一种带ai识别的行车自动上料系统
技术领域
1.本发明涉及机电自动化装置技术领域,尤其涉及一种带ai识别的行车自动上料系统。
背景技术:
2.天车在垃圾焚烧领域应用广泛,作为一个能提高工作效率的通用设备,一直以来得到广泛的应用。但天车按照特种设备管理,操作也需要合格的操作工,由于工人操作水平不一致,存在安全隐患,且极易发生安全事故。如果能提高天车的自动控制水平,逐步替代工人,不仅能提高操作效率,降低企业成本,还能更加安全可靠。
技术实现要素:
3.本发明提出的一种带ai识别的行车自动上料系统,解决了上述背景技术中所提出的问题。
4.为了实现上述目的,本发明采用了如下技术方案:
5.一种带ai识别的行车自动上料系统,包括天车、防摇摆控制系统、plc系统、低压配系统、上位机系统和零点机构,其中:
6.所述防摇摆控制系统包括传感器、编码器、限位开关和雷达;
7.所述低压配系统包括空气开关、接触器和变频器;
8.所述plc系统包括电源、cpu、io模块、继电器和安全栅;
9.所述上位机系统包括工控机和软件;
10.优选的,所述零点机构包括横梁和天车,横梁上安装有用于天车移动的轨道,横梁上开设有工艺槽,工艺槽内安装有光电开关。
11.优选的,所述限位开关与编码器电性连接,传感器与编码器电性连接,传感器与雷达电性连接。
12.优选的,所述变频器与接触器电性连接,接触器与空气开关电性连接,空气开关与安全栅电性连接。
13.优选的,所述电源与cpu电性连接,cpu与io模块电性连接,io模块与继电器电性连接,继电器与安全栅电性连接。
14.优选的,所述工控机与软件电性连接,软件与变频器电性连接,变频器与限位开关电性连接。
15.优选的,所述天车中的就地操作台和中控操作台上均安装有ai识别摄像头。
16.优选的,包括以下步骤:
17.s101:在天车底部加装料位安装有检测探头;
18.s102:在待命状态时,通过检测探头对前一个抓取分区内料位标高进行实时监测,剔除坏值后,综合计算分区内的平均料位标高;
19.s103:通过雷达精准探测分区内料位标高,实现物料堆积情况的三维建模,作为行
车自动上料的数据支撑,并通过三维图形显现在屏幕上,作为工作人员对实际情况的监控。
20.优选的,包括以下步骤:
21.s201:在储料坑设置几个分区,操作人员制定分区;
22.s202:给出上料指令后,天车自动执行指令,自动移动到指定分区处,放下抓斗;
23.s302:抓料后提升,自动移动到落料斗处,放下抓斗,打开抓斗落料,一个动作完成后,自动回到原始位置,进入新一轮待命状态
24.有益效果:
25.1、本发明增加防摇摆控制系统,防摇摆控制系统能自动消除吊物在运行过程中产生的摇摆,可以更快地完成吊物的转运,特别是带有定位功能的自动化天车,能使天车的操作变得更高效更安全。
26.2、本发明中天车设置自动归零点,定期运行到设计零点,与编码器产生的绝对位置比对,确认是否有偏移,如果偏移量超过设计范围,自动增加或减少偏移量,重新归零,解决目前大车定位距离跑偏的问题。
27.3、本发明中就地操作台和中控操作台带ai识别摄像头,不仅能够识别出操作人员是否具备操作天车的资格且给予操作权限,不具备操作权限不能操作,同时自动切换操作权限,以就地操作权限为最高级;此外夜间还能识别操作工人是否清醒,是否存在安全隐患,并适时给以提醒。
28.4、本发明中天车增加全自动上料功能,在储料坑设置几个分区,操作人员制定分区,给出上料指令后,天车自动执行指令,自动移动到指定分区处,放下抓斗,抓料后提升,自动移动到落料斗处,放下抓斗,打开抓斗落料,一个动作完成后,自动回到原始位置,进入新一轮待命状态。
29.5、本发明中天车底部加装料位检测探头,在待命状态时,对前一个抓取分区内料位标高进行实时监测,剔除坏值后,综合计算分区内的平均料位标高,同时在三维建模系统中实时显示,直观清晰。
附图说明
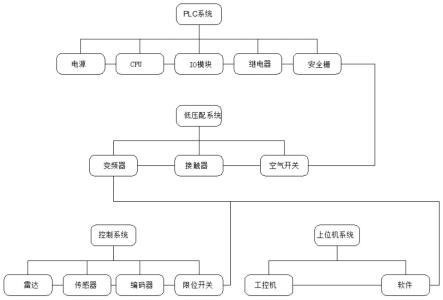
30.图1为本发明提出的一种带ai识别的行车自动上料系统的结构示意图。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
32.参照图1,一种带ai识别的行车自动上料系统,包括天车、防摇摆控制系统、plc系统、低压配系统、上位机系统和零点机构,其中:
33.所述防摇摆控制系统包括传感器、编码器、限位开关和雷达;
34.所述低压配系统包括空气开关、接触器和变频器;
35.所述plc系统包括电源、cpu、io模块、继电器和安全栅;
36.所述上位机系统包括工控机和软件;通过控制系统自带的加速、减速调节功能控制抓斗在起步和停止阶段的大幅度摆动,变频自带加减速调节功能,可以通过设定从静止到最高速的加速时间以及加速曲线来控制启动阶段行车抓斗的摆动幅度,通过设定从运行
状态到静止的减速时间和减速曲线来控制行车转斗停止阶段抓斗的摆动幅度;天车在轨道上移动至光电开关时,光电开关导通,自动确认,置零,同时与编码器产生的绝对位置比对,确认是否有偏移,如果偏移量超过设计范围,自动增加或减少偏移量,重新归零,解决目前大车定位距离跑偏的问题;通过雷达精准探测分区内料位标高,实现物料堆积情况的三维建模,作为行车自动上料的数据支撑,并通过三维图形显现在屏幕上,作为工作人员对实际情况的监控,剔除坏值,由于标高测量过程中,比如料坑中插了一根树干,标高明显比周边数值高,差距大,就可以默认为坏值。
37.零点机构包括横梁和天车,横梁上安装有用于天车移动的轨道,横梁上开设有工艺槽,工艺槽内安装有光电开关;天车通过横梁上的轨道移动,当天车移动至光电开关处时,光电开关导通,从而自动确认,置零,同时定期运行到设计零点,与编码器产生的绝对位置比对,确认是否有偏移,如果偏移量超过设计范围,自动增加或减少偏移量,重新归零,解决目前大车定位距离跑偏的问题。
38.限位开关与编码器电性连接,传感器与编码器电性连接,传感器与雷达电性连接;通过限位开关控制编码器和传感器是否工作,雷达检测到相应物体之后将信号传递至传感器,传感器再将信号传送至编码器进行处理,从而判断是否与设定值一致。
39.变频器与接触器电性连接,接触器与空气开关电性连接,空气开关与安全栅电性连接;通过空气开关控制接触器和变频器。
40.电源与cpu电性连接,cpu与io模块电性连接,io模块与继电器电性连接,继电器与安全栅电性连接;电源为cpu、io模块和继电器提供工作动力。
41.工控机与软件电性连接,软件与变频器电性连接,变频器与限位开关电性连接;软件对工控机进行操控。
42.天车中的就地操作台和中控操作台上均安装有ai识别摄像头;不仅能够识别出操作人员是否具备操作天车的资格且给予操作权限,不具备操作权限不能操作,同时自动切换操作权限,以就地操作权限为最高级;此外夜间还能识别操作工人是否清醒,是否存在安全隐患,并适时给以提醒。
43.s101:在天车底部加装料位安装有检测探头;
44.s102:在待命状态时,通过检测探头对前一个抓取分区内料位标高进行实时监测,剔除坏值后,综合计算分区内的平均料位标高;
45.s103:通过雷达精准探测分区内料位标高,实现物料堆积情况的三维建模,作为行车自动上料的数据支撑,并通过三维图形显现在屏幕上,作为工作人员对实际情况的监控;
46.s201:在储料坑设置几个分区,操作人员制定分区;
47.s202:给出上料指令后,天车自动执行指令,自动移动到指定分区处,放下抓斗;
48.s302:抓料后提升,自动移动到落料斗处,放下抓斗,打开抓斗落料,一个动作完成后,自动回到原始位置,进入新一轮待命状态;
49.工作原理:通过控制系统自带的加速、减速调节功能控制抓斗在起步和停止阶段的大幅度摆动,变频自带加减速调节功能,可以通过设定从静止到最高速的加速时间以及加速曲线来控制启动阶段行车抓斗的摆动幅度,通过设定从运行状态到静止的减速时间和减速曲线来控制行车转斗停止阶段抓斗的摆动幅度;天车在轨道上移动至光电开关时,光电开关导通,自动确认,置零,同时与编码器产生的绝对位置比对,确认是否有偏移,如果偏
移量超过设计范围,自动增加或减少偏移量,重新归零,解决目前大车定位距离跑偏的问题;通过雷达精准探测分区内料位标高,实现物料堆积情况的三维建模,作为行车自动上料的数据支撑,并通过三维图形显现在屏幕上,作为工作人员对实际情况的监控,剔除坏值,由于标高测量过程中,比如料坑中插了一根树干,标高明显比周边数值高,差距大,就可以默认为坏值。
50.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
51.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
52.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1