一种中空垂直抓取机构的制作方法
1.本发明涉及一种搬运装置,具体涉及一种中空垂直抓取机构。
背景技术:
2.现有的搬运夹持方式,是在产品的底部托起产品,依靠产品的自重产生的摩擦力,带动产品旋转。这样的旋转位置精度无法实现也想要的位置。当达不到需要的位置时,需要增加一套视觉辅助定位,视觉与电机配合作业。这样的组合不能完成解决问题,视觉对产品的外形,颜色有一定的要求。不同的产品外形、颜色,都需要对视觉软件进行调整修正,对环境和光源的要求也会高;
3.现有技术中的电机上下端有伸出一根周长在500mm左右长轴,现有技术中的搬运夹持装置无法在夹持的同时避开电机两端的长轴。
技术实现要素:
4.本发明所要解决的技术问题是提供了一种中空垂直抓取机构,通过在中空旋转模组内设置旋转机构中空通槽,在夹爪组件内设置有夹爪中空通槽,且旋转机构中空通槽与夹爪中空通槽上下相对设置,电机的长轴穿过旋转机构中空通槽与夹爪中空通槽,夹爪靠近电机,对电机本体进行定位夹持,由主动轮上的同步带带动从动轮旋转,驱动中空旋转模组实现电机任意角度旋转,方便来实现对电机的后续作业。
5.本发明中空垂直抓取机构是通过以下技术方案来实现的:包括立架、升降组件、驱动组件、辅助理线模组、中空旋转模组以及夹爪组件;
6.升降组件设置于立架侧面;升降组件上设置有横板;驱动组件与中空旋转模组相对安装在横板上;驱动组件驱动连接中空旋转模组;
7.中空旋转模组上安装有卡盘;卡盘连接辅助理线模组;中空旋转模组下端设置夹爪组件;
8.中空旋转模组内设置有旋转机构中空通槽;夹爪组件内设置有夹爪中空通槽;旋转机构中空通槽与夹爪中空通槽上下相对设置。
9.作为优选的技术方案,立架上端安装有龙门座和拖链钣金以及升降组件;拖链钣金与升降组件之间安装有拖链;
10.升降组件上安装有伺服电机;伺服电机上安装有联轴器;升降组件上安装有滑座板;滑座板与升降组件之间安装有kk模组;
11.横板连接滑座板,且横板与滑座板之间安装有加强筋。
12.作为优选的技术方案,升降组件包括安装在横板一侧的伺服电机,伺服电机上安装有主动轮;
13.横板另一侧安装有连接中空旋转模组的从轮动;主动轮与从轮动之间安装有同步带;横板上安装有限位片;限位片上安装有感应片;
14.限位片设置于从动轮一侧。
15.作为优选的技术方案,横板下表面安装有限位旋转块;限位旋转块限位安装于中空旋转模组外。
16.作为优选的技术方案,夹爪组件包括第一夹爪与第二夹爪相对安装;辅助理线模组包括第一气缸安装板,第一气缸安装板侧面安装有第二气缸安装板;第二气缸安装板上安装有手指气缸;
17.第一气缸安装板上安装有滑台气缸;滑台气缸下端安装有右夹爪。
18.本发明的有益效果是:通过在中空旋转模组内设置旋转机构中空通槽,在夹爪组件内设置有夹爪中空通槽,且旋转机构中空通槽与夹爪中空通槽上下相对设置,电机的长轴穿过旋转机构中空通槽与夹爪中空通槽,夹爪靠近电机,对电机本体进行定位夹持,由主动轮上的同步带带动从动轮旋转,驱动中空旋转模组实现电机任意角度旋转,方便来实现对电机的后续作业,本发明便于搬运取放、任意角度旋转带轴的电机。
附图说明
19.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
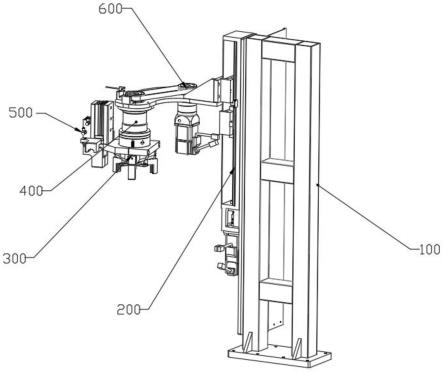
20.图1为本发明中空垂直抓取机构的示意图一;
21.图2为本发明中空垂直抓取机构的示意图二;
22.图3为本发明中空垂直抓取机构的示意图三;
23.图4为本发明中空垂直抓取机构的示意图四;
24.图5为本发明中空垂直抓取机构的示意图五;
25.图6为中空旋转模组的示意图;
26.图7为本发明中空垂直抓取机构的示意图六。
具体实施方式
27.本说明书中公开的所有特征,或公开的所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以以任何方式组合。
28.如图1-图7所示,本发明的一种中空垂直抓取机构,包括立架100、升降组件200、驱动组件600、辅助理线模组500、中空旋转模组400以及夹爪组件300;
29.升降组件200设置于立架100侧面;升降组件200上设置有横板2;驱动组件600与中空旋转模组400相对安装在横板2上;驱动组件600驱动连接中空旋转模组400;
30.中空旋转模组400上安装有卡盘31;卡盘31连接辅助理线模组500;中空旋转模组400下端设置夹爪组件300;
31.中空旋转模组400内设置有旋转机构中空通槽111;夹爪组件300内设置有夹爪中空通槽112;旋转机构中空通槽111与夹爪中空通槽112上下相对设置。
32.本实施例中,立架100上端安装有龙门座1和拖链钣金9以及升降组件200;拖链钣金9与升降组件200之间安装有拖链;
33.升降组件200上安装有伺服电机22;伺服电机22上安装有联轴器20;升降组件200
上安装有滑座板5;滑座板5与升降组件200之间安装有kk模组23;
34.横板2连接滑座板5,且横板2与滑座板5之间安装有加强筋10。
35.本实施例中,升降组件包括安装在横板2一侧的伺服电机15,伺服电机15上安装有主动轮16;横板2另一侧安装有连接中空旋转模组400的从轮动13;主动轮16与从轮动13之间安装有同步带24;横板2上安装有限位片25;限位片25上安装有感应片7;限位片25设置于从动轮13一侧。
36.本实施例中,横板2下表面安装有限位旋转块34;限位旋转块34限位安装于中空旋转模组400外;带轴的电机截面为圆形。
37.本实施例中,夹爪组件300包括第一夹爪3与第二夹爪14相对安装;辅助理线模组500包括第一气缸安装板28,第一气缸安装板28侧面安装有第二气缸安装板30;第二气缸安装板30上安装有手指气缸27;第一气缸安装板28上安装有滑台气缸26;滑台气缸26下端安装有右夹爪32。
38.工作过程如下:升降模组200下降到产品固定位-
‑‑
-夹爪组件300夹住产品-
‑‑
-升降模组200上升到预定位-
‑‑
-中空旋转模组上端的从动轮受力旋转-
‑‑
-中空旋转模组转动400(旋转到软件预设定位置)
‑‑‑
-进行对应的贴标动作
‑‑‑
回到产品初始位-
‑‑
-升降模组200下降到产品固定位-
‑‑
-夹爪组件300释放产品
‑‑‑
升降模组200上升模组初始位。
39.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何不经过创造性劳动想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书所限定的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1