一种管带机、管带机检测装置及检测方法与流程
1.本发明涉及管带机技术领域,具体涉及一种管带机、管带机检测装置及检测方法。
背景技术:
2.管状带式输送机简称为管带机,是一种承载和回程分支的输送带卷曲成管形的带式输送机。随着管带机技术的发展,其输送距离越来越长,输送带两端的距离可以达到几十公里,对管带机的日常检测、维护也愈加困难。
3.在管带机运行时,输送带存在两种状态,即用于装卸物料的展开状态和用于运输物料的卷绕状态,两种状态的输送带分别位于管带机的展开段和卷绕段;在管带机的运行过程中,位于展开段的输送带可能出现跑偏问题,位于卷绕段的输送带可能出现扭管问题,而一旦出现跑偏问题或扭管问题,便可能导致输送带撕裂甚至断裂,而且管带机的托辊受力不均,也可能会对管带机的机械结构造成损坏,造成严重损失。
4.因此,如何提供一种能够实时检测各处输送带是否存在跑偏或扭管问题的检测方法,是本领域技术人员亟待解决的技术问题。
技术实现要素:
5.本发明的目的是提供一种能够实时检测各处输送带是否存在跑偏或扭管问题的检测方法。
6.为解决上述技术问题,本发明提供一种管带机检测装置,包括壳体和固定结构,所述壳体的内部设有检测模块、数据模块、定位模块和通讯模块,所述壳体通过所述固定结构固定于管带机的输送带的侧边沿,所述检测模块能够采集所述输送带至少一侧侧边沿的第一位置信息,所述定位模块能够采集所述管带机检测装置的第二位置信息,所述数据模块能够采集并存储所述第一位置信息以及所述第二位置信息,所述通讯模块能够输出所述数据模块采集存储的信息并传输至处理单元,所述处理单元能够根据所述第一位置信息、所述第二位置信息判断所述输送带是否存在跑偏或扭管现象。
7.采用如上结构,管带机检测装置随输送带在管带机各处共同移动,通过检测模块和定位模块采集第一位置信息和第二位置信息,并通过数据模块和通讯模块统合信息并传输至处理单元,处理单元判断该位置是否存在跑偏或扭管现象,实现实时检测判断各处输送带是否出现跑偏和扭管问题。
8.在一种具体实施方式中,所述固定结构固定于所述输送带的内侧侧边沿。
9.在一种具体实施方式中,还包括示警模块,当所述处理单元判断所述管带机检测装置对应位置的所述输送带存在跑偏或扭管现象时,所述示警模块能够发出声光示警。
10.在一种具体实施方式中,所述检测模块包括角度模块,用于检测对应所述侧边沿的角度信息,所述第一位置信息包括所述角度信息,所述第一位置信息包括所述角度信息或所述第一位置信息包括由所述角度信息换算获得的位移信息。
11.本发明还提供一种管带机,包括输送带和若干托辊,所述输送带的侧边沿内侧沿
运行方向均匀设置有若干管带机检测装置,所述管带机检测装置即为上文所描述的管带机检测装置。
12.在一种具体实施方式中,还包括多个通讯节点,多个所述通讯节点沿所述管带机运行方向均匀设置,当所述管带机检测装置经过所述通讯节点时,所述通讯模块能够将所述数据模块采集的信息传输至处理单元。
13.本发明还提供一种管带机检测方法,基于上述第五或第六项所描述的管带机,包括如下步骤:
14.s1、通过管带机模拟实验和/或实际运行,管带机检测装置采集输送带在所述管带机的第二位置信息和第一正常信息,并传输至处理单元;
15.s2、所述处理单元对采集的第二位置信息和所述第一位置信息进行分析、计算,得出所述输送带的侧边沿在各位置的正常位置信息范围参数;
16.s3、启动所述管带机和各所述管带机检测装置,基于s2步骤中的所述侧边沿在各位置的正常位置信息范围参数对所述管带机各个对应位置进行实时检测,以判断是否存在跑偏或扭管现象。
17.在一种具体实施方式中,步骤s1中包括如下步骤:
18.s1.1、通过所述管带机模拟实验和/或实际运行,所述管带机检测装置分别采集所述输送带的侧边沿在展开段和卷绕段的正常位置信息,并传输至所述处理单元;
19.s2.1、所述处理单元对采集的正常位置信息进行分析、计算,通过筛选将正常位置信息范围参数分为展开段正常位置信息范围参数和卷绕段正常位置信息范围参数。
20.在一种具体实施方式中,步骤s3中包括如下步骤:
21.s3.1、所述管带机正常运行后,通过所述管带机检测装置采集所述管带机各个位置的所述输送带的第一位置信息和第二位置信息,并上传至所述处理单元;
22.s3.2、所述处理单元根据所述第二位置信息判断所述输送带是否在展开段位置,若是,则判断第一位置信息是否符合所述展开段的正常位置信息范围参数,若不符合,则判断存在跑偏现象;若所述输送带在卷绕段位置,则判断第一位置信息是否符合所述卷绕段的正常角度范围参数,若不符合,则判断存在扭管现象。
23.在一种具体实施方式中,管带机检测装置还包括多个通讯节点,多个所述通讯节点沿所述管带机运行方向均匀设置;所述管带机检测方法包括如下步骤:
24.s4、当各所述管带机检测装置经过通讯节点时,将当前的第一位置信息和第二位置信息传输至所述处理单元,所述处理单元将各所述通讯节点输出的第一位置信息进行整合分析,基于各位置的正常位置范围参数输出所述管带机的整体跑偏或扭管曲线。
附图说明
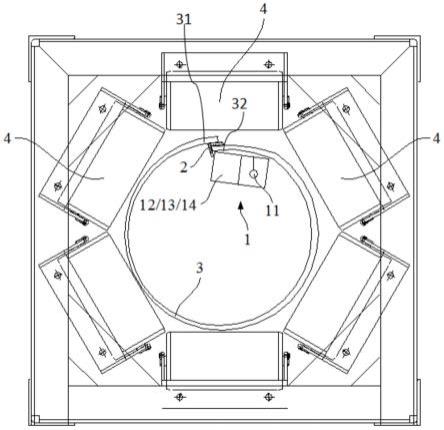
25.图1是本发明实施例所提供管带机在卷绕段的截面结构示意图;
26.图2是本发明实施例所提供管带机在展开段的截面结构示意图;
27.图3是本发明实施例所提供管带机检测装置的总体传输结构;
28.图4是本发明实施例所提供管带机检测方法的逻辑流程图。
29.图1-4中的附图标记说明如下:
30.1壳体、11角度模块、12数据模块、13定位模块、14通讯模块、2固定结构、3输送带、
31外侧侧边沿、32内侧侧边沿、4托辊。
具体实施方式
31.为了使本领域的技术人员更好地理解本发明的技术方案,下面结合附图和具体实施例对本发明作进一步的详细说明。
32.本发明实施例提供一种管带机检测装置,请参考图1-2,包括壳体1和固定结构2,壳体1的内部设有检测模块、数据模块12、定位模块13和通讯模块14,壳体1通过固定结构2固定于管带机的输送带3的至少一个侧边沿的内侧。具体如图1,图1中为管带机的中部,即卷绕段的径向截面图,此时输送带3卷绕为管状结构,其两侧的侧边沿相互搭接设置,搭接在内侧的侧边沿为内侧侧边沿32,搭接在外侧的侧边沿为外侧侧边沿31,本实施例中管带机检测装置具体固定于输送带3内侧侧边沿32的内侧,即设置于管状输送带3的内部,当处于图2所示的展开段时,管带机检测装置依然设置在内侧侧边沿32,但此时内侧侧边沿32和另一侧的外侧侧边沿31分离,实际上不存在内、外限制,本文将壳体1描述为设置在内侧侧边沿32,是以卷绕段时的位置为基准进行定义,方便说明管带机检测装置相对输送带的位置。
33.检测模块用于检测内侧侧边沿32的第一位置信息,在本实施例中检测模块具体包括角度模块11,角度模块11能够采集输送带3内侧侧边沿32的角度信息,第一位置信息包括该角度信息,即通过检测内侧侧边沿32的倾角确定内侧侧边沿32的位置,此倾角可以是相对水平方向的倾角或者是相对某一固定参考系的倾角。当内侧侧边沿32的倾角发生变化,表明内侧侧边沿32的位置发生了变化,可以反应出此位置出的输送带可能出现了跑偏、扭管现象。可知,角度模块11可以检测一侧的侧边沿的角度信息,或者分别设置检测两侧侧边沿的角度信息,都可以。本实施例主要是检测内侧侧边沿32的角度信息,因为跑偏、扭管是内侧侧边沿32和外侧侧边沿31的相对位置关系发生变化,故检测一侧的侧边沿的角度信息即可,而且设置在输送带的内部,也利于管带机检测装置的稳定。
34.此外,跑偏或扭管现象通过位移描述更为直观,故上述在检测角度信息后,可以换算为输送带两侧侧边沿的相对位移,可针对具体管带机标定坐标原点,通过倾角计算出管带机内侧侧边沿32的位移。当然,不进行角度和位移的换算,而直接以角度进行对比分析也可以是的,或者,检测模块为位移检测模块,直接检测内侧侧边沿32相对外侧侧边缘的位移变化也可以。
35.上述的定位模块13能够采集管带机检测装置的第二位置信息,即管带机检测装置在整个管带机上的位置,具体是处于管带机输送带运输方向上的具体位置,这样在检测出偏离或扭管现象时,可以获悉输送带出现此现象的具体位置。
36.数据模块12能够采集并存储上述的第一角度信息和第二位置信息,通讯模块14能够将第一位置信息和第二位置信息传输至处理单元,处理单元能够根据第一位置信息和第二位置信息判断输送带3是否存在跑偏或扭管现象。
37.采用如上结构,管带机检测装置随输送带3在管带机各处共同移动,通过角度模块11和定位模块13采集角度信息和第二位置信息,并通过数据模块12和通讯模块14统合信息并传输至处理单元,处理单元可以根据上述信息判断输送带在第二位置信息处是否存在跑偏或扭管现象,实现实时检测输送带设置管带机检测装置的各位置是否出现跑偏和扭管问
题。
38.当输送带3沿管带机移动时,与之相对固定的管带机检测装置也共同移动;图2中为管带机的两端部位置的示意图,即管带机展开段的径向截面图,此时输送带3展开为截面大致呈弧形的带状结构,管带机检测装置同样固定于用于搭接的两侧边沿中卷绕于内侧的侧边沿,且设置于弧状输送带3的开口方向,即位于侧边沿的内侧,这样卷绕后才可以位于输送带3的内部。当完成一次送料运行至管带机的头部时,管带机检测装置可通过自带翻转导轨片,与输送带同步完成翻转,即始终处于输送带的内部。
39.需要说明的是,当输送带3在卷绕状态和展开状态之间切换时,即在图1所示的状态和图2所示的状态间切换时,固定于输送带3侧边沿的管带机检测装置同样随之移动,也在图1所示的状态和图2所示的状态间切换,且管带机检测装置的设置角度始终与输送带3的内侧侧边沿32的设置角度相对固定,因此,管带机检测装置中角度模块11能够采集输送带3对应的内侧侧边沿32的设置角度,以确认对应的内侧侧边是否产生倾角变化。
40.具体的,本实施例中固定结构2为卡扣连接件,壳体1能够通过卡扣连接件固定于输送带3的内侧侧边沿32,则壳体1会与输送带3内侧侧边沿32保持位置的同步变化。
41.如图1和图2所示,卡扣连接件的一端能够卡住输送带3的内侧侧边沿32,另一端与壳体1固定连接,当输送带3的内侧侧边沿32的位置或角度改变时,其便能够带动壳体1一同改变。卡扣连接件固定方式简单,且易于拆卸。
42.本实施例中角度模块11具体为数字倾角仪,数字倾角仪能够采集自身角度,以间接采集输送带3内侧侧边沿32的角度;定位模块13具体为无线定位器,其能够实时采集自身所在位置,即采集管带机检测装置的位置,以确认所固定输送带3的位置;数据模块12可以是存储器、服务器等,其能够存储所在管带机检测装置的角度信息和位置信息,并统计、整合传输至通讯模块14;通讯模块14具体为无线通讯收发装置,可通过无线网络的方式传输信息。
43.可以理解,角度模块11、数据模块12、定位模块13和通讯模块14还可以是除上文所描述的其他结构,本发明对此均不做限定,只要其能够实现上文所描述的功能即可。
44.本实施例中管带机检测装置还进一步包括示警模块,当处理单元判断管带机检测装置对应位置的输送带3存在跑偏或扭管现象时,示警模块能够发出声光等示警信号。示警模块可以是警报器等结构,其在管带机检测装置检测出输送带3存在跑偏或扭管现象时,能够发出声光示警,以提醒工作人员进行处理,且能够较为方便地找到问题位置。
45.本发明实施例还提供一种管带机,请参考图1和图2,包括输送带3和若干托辊4,输送带3的内侧侧边沿32内侧沿运行方向均匀设置有若干管带机检测装置,管带机检测装置即为上文所描述的管带机检测装置,由于管带机检测装置已经具有如上的技术效果,那么包含该管带机检测装置的管带机也应具有相同的技术效果,故在此不再赘述。
46.本实施例中若干管带机检测装置沿运行方向均匀分布于输送带3,即无论是输送带3的输送方向还是输送带3的回程方向均设有管带机检测装置,各管带机检测装置与输送带3的相对位置不变,随输送带3共同输送、回程。
47.当然,管带机检测装置的总数量以及相邻管带机检测装置的设置距离均可根据实际情况而定,本发明对此不做限定,只要保证其能够及时检测到跑偏或扭管现象即可,即,相邻管带机检测装置之间的距离应不大于跑偏或扭管现象出现的最短距离。
48.本实施例还包括若干通讯节点,各通讯节点沿管带机运行方向均匀设置,当管带机检测装置经过通讯节点时,其通讯模块14将数据模块12采集的角度信息和位置信息传输至处理单元。可知,通讯模块14也可以实时连续地进行信息传递,这里通过通讯节点触发传递,更加高效。
49.当管带机检测装置经过通讯节点时,通讯节点能够触发通讯模块14,使通讯模块14将数据模块12内的角度信息和第二位置信息传输至处理单元,如此处理单元即可根据各管带机检测装置的实时角度信息和第二位置信息统计出管带机整体的跑偏或扭管情况,以判断管带机整体的运行状态。
50.本发明实施例还提供一种管带机检测方法,基于上文所描述的管带机,请参考图3和图4,包括如下步骤:
51.s1、通过管带机模拟实验和/或实际运行,管带机检测装置采集输送带3在管带机的第二位置信息和第一正常信息,并传输至处理单元;
52.s2、处理单元对采集的第二位置信息和第一位置信息进行分析、计算,得出输送带3的侧边沿在各位置的正常位置信息范围参数;
53.s3、启动管带机和各管带机检测装置,基于s2步骤中的侧边沿在各位置的正常位置信息范围参数对管带机各个对应位置进行实时检测,以判断是否存在跑偏或扭管现象。
54.步骤s1中在模拟实验或者实际运行中,在不会发生扭转、偏离的情况下,检测分析输送带的内侧侧边沿32和外侧侧边沿31的相对角度或者相对位移,获得正常位置信息范围参数,以作为后续s3在管带机正常工作过程中判断偏离或者扭管的依据。
55.采用如上方法,能够通过各管带机检测装置采集所在输送带3位置的角度信息和第二位置信息,并传输至处理单元,以分析判断输送带3是否发生跑偏或扭管问题以及产生该问题的具体位置。
56.需要说明,管带机检测装置所采集的角度信息和第二位置信息为该管带机检测装置自身角度模块11的角度信息和定位模块13的位置信息,而由于角度模块11与该处输送带3的内侧侧边沿32的角度保持相对固定,定位模块13的位置也与该处输送带3保持相对固定,因此该位置信息可视为该处输送带3的位置信息,角度信息也可视为或者转换为该处输送带3的角度信息。
57.在s1步骤中,通过管带机模拟实验或实际运行,在保证不出现跑偏和扭管现象的前提下,可以多次采集输送带3各位置的角度信息和第二位置信息,此时该角度信息为不存在跑偏或扭管现象的正常位置信息,经过处理单元进行分析、计算,即可得出在输送带3各位置的正常位置信息范围参数,正常位置信息范围参数可以存储到处理单元中;在s3步骤中,当管带机检测装置在某个位置,而采集的角度信息在正常角度范围参数外时,即处理单元可判断该位置出现跑偏或扭管问题。
58.上述步骤s3中具体包括如下步骤:
59.s1.1、通过管带机模拟实验和/或实际运行,管带机检测装置分别采集所述输送带3的内侧侧边沿32在展开段和卷绕段的正常位置信息,并传输至所述处理单元;
60.s2.1、处理单元对采集的正常位置信息进行分析、计算,通过筛选将正常位置信息范围参数分为展开段正常位置信息范围参数和卷绕段正常位置信息范围参数;
61.s3.1、管带机正常运行后,通过管带机检测装置采集管带机各个位置的所述输送
带3的第一位置信息和第二位置信息,并上传至所述处理单元;
62.s3.2、处理单元根据第二位置信息判断输送带3是否在展开段位置,若是,则判断第一位置信息是否符合展开段的正常位置信息范围参数,若不符合,则判断存在跑偏现象;若输送带3在卷绕段位置,则判断第一位置信息是否符合卷绕段的正常角度范围参数,若不符合,则判断存在扭管现象。
63.输送带3在展开段出现的扭转即为跑偏现象,在卷绕段出现的扭转即为扭管现象,而通过统计展开段对应的位置信息和卷绕段对应的位置信息,在管带机检测装置采集第二位置信息并传输至处理单元后,处理单元便能够通过该位置信息判断该管带机检测装置在展开段或卷绕段,以对该位置出现跑偏问题或扭管问题做具体判断。
64.本方法中还可以包括如下步骤:
65.s4、当各管带机检测装置经过通讯节点时,将当前的位置信息和角度信息传输至处理单元,处理单元将各通讯节点的角度信息进行整合分析,基于各位置的正常角度范围参数输出管带机的整体跑偏或扭管曲线。
66.如图4所示,通过各通讯节点对各管带机检测装置的第一位置信息和第二位置信息做定时采集,经过处理单元的计算即可得出输送带3各位置的运行状况,再经过整合、模拟绘制等,即可在处理单元的人机界面显示出实时的输送带运行曲线和输送带运行状况图示,以便工作人员随时、方便的了解管带机的整体运行情况,提升工作人员对管带机的控制便捷性。
67.以上仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1