多工位运输加工平台
1.本发明涉及一种多工位运输加工平台,属于流水线加工设备领域。
背景技术:
2.物料运输平台应用广泛,如加工生产线。生产线上的物料在加工时常常需要从一个工序运输到另外一个工序,同时不同工序物料加工的位置一般不同,即需要重新调整物料在平台上的方位以适应新的加工工序要求。
3.传统的方式是物料的运输采用一套物料运输机构完成,物料加工位置的调整再采用另外一套机构实现,两套机构互为独立,不具备通用性且生产使用成本高。本国专利cn 215695372u公开了一种高精度多工位点胶设备,通过x轴移动组件、z轴移动组件及y轴移动载台分别控制工件的位置,才能满足点胶加工的要求,而此方案同时涉及的构件多散乱且结构复杂,通用性差且不具备远距离物料运输功能。
技术实现要素:
4.本发明所要解决的技术问题是现有技术采用多套独立的机构才能实现物料或加工件的运输及多工位加工,设备成本高。
5.本发明解决其技术问题所采用的技术方案是:多工位运输加工平台,包括旋转平台、转动平台和行走平台,旋转平台、转动平台和行走平台由上至下依次设置,且旋转平台与转动平台转动设置,且转动平台上设置有旋转驱动组件,所述旋转驱动组件可驱动旋转平台在360
°
范围内旋转;转动平台与行走平台的转动设置,行走平台上设置有转动驱动组件,所述转动驱动组件可驱动转动平台在90
°
范围内旋转;行走平台的下端设置有行走驱动组件。
6.其中,上述装置中所述旋转驱动组件包括传动转轴、蜗轮和蜗杆,所述传动转轴竖直设置在转动平台中心处,且与转动平台转动连接,传动转轴的上端与旋转平台连接,蜗轮套设在传动转轴上,蜗杆架设在转动平台上,且与蜗轮啮合。
7.进一步,上述装置中还包括旋转电机和传动箱,所述旋转电机设置在转动平台上且输出转轴与蜗杆端部连接,传动箱为l形管结构,且短管竖直设置在转动平台上,蜗轮两端设置有台阶状的轴肩,且轴肩上分别套设有推力球轴承和深沟球轴承,推力球轴承和深沟球轴承的外圈与传动箱短管内壁连接,且蜗杆通过蜗杆用轴承架设在传动箱长管内。
8.进一步,上述装置中还包括支架,所述支架为圆环状结构,且上端设置有凹槽,凹槽内设置有若干滚珠,支架套设在传动转轴外侧,且下端与转动平台固定,滚珠与旋转平台下端面接触连接。
9.其中,上述装置中所述转动驱动组件包括齿轮和齿条,所述齿轮转动设置在行走平台上,齿轮的齿转轴竖直设置在行走平台靠端部位置且上端与转动平台连接,齿条滑动连接在行走平台上,且与齿轮啮合。
10.进一步,上述装置中还包括气缸、导杆和支撑架,所述导杆通过支撑架水平架设在
行走平台上,且导杆穿设在齿条上,气缸设置在行走平台上,且伸出杆端与齿条连接。
11.其中,上述装置中还包括滚动支撑组件,所述滚动支撑组件包括滚球和固定块,所述固定块间隔设置在行走平台的上端面上,且固定块上端设置凹槽,滚球设置在凹槽内,且滚球与转动平台的下端面接触连接。
12.其中,上述装置中所述行走驱动组件包括支撑座、行走轮和驱动组件,所述行走轮数量为4个,且通过支撑座均匀设置在行走平台的下端面上,驱动组件可驱动行走轮运动。
13.进一步,上述装置中所述驱动组件包括驱动电机、驱动锥齿轮和从动锥齿轮,所述驱动电机设置在行走平台的下端面上,驱动锥齿轮设置在驱动电机的输出轴上,且从动锥齿轮设置在两个行走轮的驱动转轴上,且驱动锥齿轮、从动锥齿轮啮合。
14.进一步,上述装置中所述行走轮为圆周齿轮结构。
15.本发明的有益效果是:本装置采用三层平台设计,一层的旋转平台可以绕着固连于二层的转动平台的转轴实现360
°
任意角度旋转,二层的转动平台可以绕着转动连接与三层的行走平台的旋转轴实现90
°
范围内任意角度旋转,两层平台旋转运动的组合即可改变平台上物料的方位,适应多方位多角度的加工要求。本装置具体为采用电机带动蜗杆旋转,蜗杆带动蜗轮旋转,蜗轮带动一层旋转平台实现360
°
范围旋转运动,同时实现了旋转平台的自锁与减速。采用气缸带动齿条直线运动,齿条带动齿轮旋转运动,齿轮带动二层转动平台实现90
°
范围内任意角度旋转。同时行走驱动组件直接驱动整个装置移动,实现了物料的运输功能以及物料加工方位可调的功能,在生产加工领域能方便物料的运输以及物料加工方位的调节,降低工人劳动强度,便于组织自动化产线。该机构结构紧凑,容易生产,应用前景广泛。
附图说明
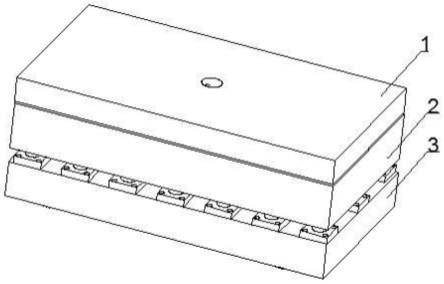
16.图1为本发明结构示意图。
17.图2为本发明各平台转动后的结构示意图。
18.图3为本发明爆炸图。
19.图4为本发明旋转驱动组件的结构示意图。
20.图5为本发明转动驱动组件的结构示意图。
21.图6为本发明行走驱动组件的结构示意图。
22.图中标记为:1是旋转平台,2是转动平台,3是行走平台,4是旋转驱动组件,5是支架,6是滚珠,7是传动箱,8是旋转电机,9是蜗杆,10是蜗轮,11是推力球轴承,12是深沟球轴承,13是定位盖,14是传动转轴,15是蜗杆用轴承,16是端盖,17是转动驱动组件,18是固定块,19是滚球,20是齿转轴,21是齿轮,22是齿条,23是气缸,24是导杆,25是支撑架,26是支撑座,27是行走轮,28是输出轴,29是驱动电机,30是驱动锥齿轮,31是从动锥齿轮,32是驱动转轴。
具体实施方式
23.下面结合附图对本发明进一步说明。
24.如图1至图6所示,本发明的多工位运输加工平台,包括旋转平台1、转动平台2和行走平台3,旋转平台1、转动平台2和行走平台3由上至下依次设置,且旋转平台1与转动平台2
转动设置,且转动平台2上设置有旋转驱动组件4,所述旋转驱动组件4可驱动旋转平台1在360
°
范围内旋转;转动平台2与行走平台3的转动设置,行走平台3上设置有转动驱动组件17,所述转动驱动组件17可驱动转动平台2在90
°
范围内旋转;行走平台3的下端设置有行走驱动组件。本领域技术人员能够理解的是,本装置将旋转平台1、转动平台2和行走平台3由上至下依次设置,且旋转驱动组件4可驱动旋转平台1在0至360
°
范围内旋转,转动驱动组件17可驱动转动平台2在0至90
°
范围内旋转,行走驱动组件驱动整个装置来实现装置的多工位移动,满足物料或加工件的位置移动要求。实际只需要将物料或加工件安放在旋转平台1的上端面上即可。
25.优选的,上述装置中所述旋转驱动组件4包括传动转轴14、蜗轮10和蜗杆9,所述传动转轴14竖直设置在转动平台2中心处,且与转动平台2转动连接,传动转轴14的上端与旋转平台1连接,蜗轮10套设在传动转轴14上,蜗杆10架设在转动平台2上,且与蜗轮10啮合。本领域技术人员能够理解的是,本装置优选旋转驱动组件4的结构,具体包括传动转轴14、蜗轮10和蜗杆9,实际将传动转轴14竖直设置在转动平台2中心处,且与转动平台2转动连接,使得传动转轴14可自由旋转,而传动转轴14的上端与旋转平台1连接,蜗轮10套设在传动转轴14上,实际通过连接键使得蜗轮10与传动转轴14一同旋转,蜗杆9架设在转动平台2上,且蜗杆9应与转动平台2转动连接,也即是蜗杆9可自由转动,同时与蜗轮10啮合。实际为了安装旋转驱动组件4可优选转动平台2为上端开口的箱体式结构。旋转驱动组件4设置在转动平台2的箱体中部即可。
26.优选的,上述装置中还包括旋转电机8和传动箱7,所述旋转电机8设置在转动平台2上且输出转轴与蜗杆9端部连接,传动箱7为l形管结构,且短管竖直设置在转动平台2上,蜗轮10两端设置有台阶状的轴肩,且轴肩上分别套设有推力球轴承11和深沟球轴承12,推力球轴承11和深沟球轴承12的外圈与传动箱7短管内壁连接,且蜗杆9通过蜗杆用轴承15架设在传动箱7长管内。本领域技术人员能够理解的是,为了方便驱动蜗杆9,本装置优选还包括旋转电机8和传动箱7,具体将旋转电机8设置在转动平台2上且输出转轴与蜗杆9端部连接,优选传动箱7为l形管结构,用于安装和固定蜗轮10和蜗杆9,且将短管竖直设在转动平台2上,短管也即是传动箱7短边所在的管道,同时在蜗轮10两端设置有台阶状的轴肩,且轴肩上分别套设有推力球轴承11和深沟球轴承12,推力球轴承11和深沟球轴承12的外圈与传动箱7短管内壁连接,端部通过定位盖13封闭,实现蜗轮10的位置固定。且蜗杆9通过蜗杆用轴承15架设在传动箱7长管内,端部通过端盖16密封即可,保持蜗轮10与蜗杆9啮合即可。
27.优选的,上述装置中还包括支架5,所述支架5为圆环状结构,且上端设置有凹槽,凹槽内设置有若干滚珠6,支架5套设在传动转轴14外侧,且下端与转动平台2固定,滚珠6与旋转平台1下端面接触连接。本领域技术人员能够理解的是,为了降低旋转平台1旋转时的启动扭矩以及支撑旋转平台1的重量,本装置优选通过支架5实现支撑,具体是在支架5上端设置有凹槽,凹槽内设置有若干滚珠6,保持滚珠6与旋转平台1下端面点接触连接。而将支架5套设在传动转轴14外侧,且下端与转动平台2固定即可。
28.优选的,上述装置中所述转动驱动组件17包括齿轮21和齿条22,所述齿轮21转动设置在行走平台3上,齿轮21的齿转轴20竖直设置在行走平台3靠端部位置且上端与转动平台2连接,齿条22滑动连接在行走平台3上,且与齿轮21啮合。本领域技术人员能够理解的是,本装置优选齿轮21和齿条22来实现转动平台2的在0至90
°
范围内旋转。具体是将齿轮21
转动设置在行走平台3上,保持齿转轴20与行走平台3垂直设置,齿轮21的齿转轴20竖直设置在行走平台3靠端部位置且上端与转动平台2连接,齿轮21旋转带动齿转轴20旋转进而实现转动平台2的旋转,而优选齿条22滑动连接在行走平台3上,且与齿轮21啮合。
29.优选的,上述装置中还包括气缸23、导杆24和支撑架25,所述导杆24通过支撑架25水平架设在行走平台3上,且导杆24穿设在齿条22上,气缸23设置在行走平台3上,且伸出杆端与齿条22连接。本领域技术人员能够理解的是,本装置优选齿轮21和齿条22通过气缸23来驱动具体是气缸23设置在行走平台3上,且伸出杆端与齿条22连接,使得气缸23直接拉动齿条22移动进而带动齿轮21旋转,控制齿条22的移动距离就可实现齿轮21的90
°
范围内旋转,而为了防止齿条22跑偏,本装置还优选导杆24通过支撑架25水平架设在行走平台3上,且导杆24穿设在齿条22上,通过导杆24实现齿条22的导向,且在支撑架25上部加工出凸台用于支撑齿条22,防止齿条22绕导杆24转动。
30.优选的,上述装置中还包括滚动支撑组件,所述滚动支撑组件包括滚球19和固定块18,所述固定块18间隔设置在行走平台3的上端面上,且固定块18上端设置凹槽,滚球19设置在凹槽内,且滚球19与转动平台2的下端面接触连接。本领域技术人员能够理解的是,为了降低转动平台2的扭矩以及支撑重量,本装置优选通过滚动支撑组件来实现转动平台2的二次支撑以及降低启动扭矩,具体是优选滚动支撑组件包括滚球19和固定块18,将固定块18间隔设置在行走平台3的上端面上,同时在固定块18上端设置凹槽,滚球19设置在凹槽内,使得滚球19在固定块内可任一角度旋转,且不能从凹槽内跑出即可,而滚球19与转动平台2的下端面接触连接,使得转动时,始终有滚球19与转动平台2下端面滚动接触。
31.优选的,上述装置中所述行走驱动组件包括支撑座26、行走轮27和驱动组件,所述行走轮27数量为4个,且通过支撑座26均匀设置在行走平台3的下端面上,驱动组件可驱动行走轮27运动。本领域技术人员能够理解的是,本装置优选驱动组件的具体结构,包括支撑座26、行走轮27和驱动组件,优选行走轮27数量为4个,且呈长方形布置即可。通过支撑座26均匀设置在行走平台3的下端面上,驱动组件可驱动行走轮27运动,实现装置的移动。
32.优选的,上述装置中所述驱动组件包括驱动电机29、驱动锥齿轮30和从动锥齿轮31,所述驱动电机29设置在行走平台3的下端面上,驱动锥齿轮30设置在驱动电机29的输出轴28上,且从动锥齿轮31设置在两个行走轮27的驱动转轴32上,且驱动锥齿轮30、从动锥齿轮31啮合。本领域技术人员能够理解的是,本装置只是优选采用锥齿轮啮合来驱动行走轮27移动,具体是将驱动电机29设置在行走平台3的下端面上,驱动锥齿轮30设置在驱动电机29的输出轴28上,且从动锥齿轮31设置在两个行走轮27的驱动转轴32上,实际为了方便安装可优选四个行走轮27按长方形布置,而从动锥齿轮31则安装在两短管所在的行走轮27上即可,通过驱动锥齿轮30、从动锥齿轮31啮合,使得驱动电机29的输出转矩作用在行走轮27上实现装置的移动。
33.优选的,上述装置中所述行走轮27为圆周齿轮结构。本领域技术人员能够理解的是,为了方便导向,本装置优选将行走轮27设置为圆周齿轮结构,同时实际应在机架上端对应设置有导向齿条,通过行走轮27与导向齿条啮合来实现装置按需要的轨迹运动,同时采用这种啮合方式,使得装置的定位更加准确。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1