一种救援设备属具作业控制系统的制作方法
1.本发明涉及属具控制技术领域,尤其公开了一种救援设备属具作业控制系统。
背景技术:
2.在救援设备中,常常使用到多功能动力头,多功能动力头包含卷扬起吊装置、抓手装置和工作吊斗装置等,由于救援设备安全作业的需求,作业时只能使用这3种装置的任一种装置。现有通用的解决方案在每个不同的装置上安装一个io控制模块或控制器进行独立的数据采集和动作控制。但是,现有救援设备采用在每个不同的装置上安装一个io控制模块或控制器进行独立的数据采集和动作控制的方式,成本增加,io模块或控制器安装空间受限制、且io模块或控制器容易损坏。
3.因此,现有救援设备存在的成本增加,io模块或控制器安装空间受限制、且io模块或控制器容易损坏,是目前亟待解决的技术问题。
技术实现要素:
4.本发明提供了一种救援设备属具作业控制系统,旨在解决现有救援设备存在的成本增加,io模块或控制器安装空间受限制、且io模块或控制器容易损坏的技术问题。
5.本发明涉及一种救援设备属具作业控制系统,包括臂架、标准固定接口、属具托盘、卷场起吊装置、抓手装置和工作斗装置,卷场起吊装置、抓手装置和工作斗装置放置于属具托盘上,标准固定接口设于臂架的头部,用于根据不同的需求,安装卷场起吊装置、抓手装置或工作斗装置三种不同属具中的一种属具,以分别进行吊载、抓取或高空作业三种不同作业工况中的任意一种作业工况;臂架的头部设有io模块总成,io模块总成靠近标准固定接口的附近设置,用于分别控制卷场起吊装置、抓手装置或工作斗装置进行吊载、抓取或高空作业。
6.进一步地,io模块总成包括控制盒、以及设于控制盒上的io模块、端子排和电缆连接器,io模块分别与端子排和电缆连接器电连接,电缆连接器用于与卷场起吊装置、抓手装置和工作斗装置三种不同属具的电缆连接器74直接对插;io模块用于自动判断属具的类型,并进行相应的逻辑运算控制。
7.进一步地,io模块包括第一开关量输入端口、第二开关量输入端口和第三开关量输入端口,电缆连接器通过第一导线与第一开关量输入端口电连接,电缆连接器通过第二导线与第二开关量输入端口电连接,电缆连接器通过第三导线与第三开关量输入端口电连接。
8.进一步地,io模块用于识别到对插的属具是抓手装置后,则向第一开关量输入端口输入高电平;若识别到对插的属具是工作斗装置后,则向第二开关量输入端口输入高电平;若识别到对插的属具是卷场起吊装置后,则向第三开关量输入端口输入高电平。
9.进一步地,io模块包括第一pwm输出端口、第二pwm输出端口、第三pwm输出端口和第四pwm输出端口,若io模块接收底盘控制总线传送过来的抓手指令后,则向第一pwm输出
端口、第二pwm输出端口、第三pwm输出端口或第四pwm输出端口输出相应的电流控制信号,控制相应电磁阀动作。
10.进一步地,抓手指令包括抓手伸出指令、抓手缩回指令、抓手左转指令和抓手右转指令,io模块用于若接收的抓手指令为抓手伸出指令时,则向第一pwm输出端口输出第一电流控制信号,控制抓手伸出电磁阀动作;若接收的抓手指令为抓手缩回指令时,则向第二pwm输出端口输出第二电流控制信号,控制抓手缩回电磁阀动作;若接收的抓手指令为抓手左转指令时,则向第三pwm输出端口输出第三电流控制信号,控制抓手左转电磁阀动作;若接收的抓手指令为抓手右转指令时,则向第四pwm输出端口输出第四电流控制信号,控制抓手右转电磁阀动作。
11.进一步地,io模块包括第五pwm输出端口、第六pwm输出端口和第七pwm输出端口,若io模块接收底盘控制总线传送过来的工作斗指令后,则向第五pwm输出端口、第六pwm输出端口或第七pwm输出端口输出相应的电流控制信号,控制相应电磁阀动作。
12.进一步地,工作斗指令包括工作斗属具指令、工作斗降落指令和工作斗升起指令,io模块用于若接收的工作斗指令为工作斗属具指令时,则向第五pwm输出端口输出第五电流控制信号,控制工作斗属具电磁阀动作;若接收的工作斗指令为工作斗降落指令时,则向第六pwm输出端口输出第六电流控制信号,控制工作斗降落电磁阀动作;若接收的工作斗指令为工作斗升起指令时,则向第七pwm输出端口输出第七电流控制信号,控制工作斗升起电磁阀动作。
13.进一步地,io模块包括第八pwm输出端口和第九pwm输出端口,若io模块接收底盘控制总线传送过来的卷扬指令后,则向第八pwm输出端口或第九pwm输出端口输出相应的电流控制信号,控制相应电磁阀动作。
14.进一步地,卷扬指令包括卷扬降落指令和卷扬升起指令,io模块用于若接收的卷扬指令为卷扬降落指令时,则向第八pwm输出端口输出第八电流控制信号,控制卷扬降落电磁阀动作;若接收的卷扬指令为卷扬升起指令时,则向第九pwm输出端口输出第九电流控制信号,控制卷扬升起电磁阀动作。
15.本发明所取得的有益效果为:
16.本发明提供一种救援设备属具作业控制系统,采用臂架、标准固定接口、属具托盘、卷场起吊装置、抓手装置和工作斗装置,卷场起吊装置、抓手装置和工作斗装置放置于属具托盘上,标准固定接口设于臂架的头部,用于根据不同的需求,安装卷场起吊装置、抓手装置或工作斗装置三种不同属具中的一种属具,以分别进行吊载、抓取或高空作业三种不同作业工况中的任意一种作业工况;臂架的头部设有io模块总成,io模块总成靠近标准固定接口的附近设置,用于分别控制卷场起吊装置、抓手装置或工作斗装置进行吊载、抓取或高空作业。本发明提供的救援设备属具作业控制系统,自动识别属具类型并进行相应的功能操作,不同属具对应控制不同的端口电流,不同的属具系统配置不同的控制参数,自动化程度和安全系数高;降低成本,实现1个io模块可以控制3个不同的属具,模块的安全性和稳定性也得到保障。
附图说明
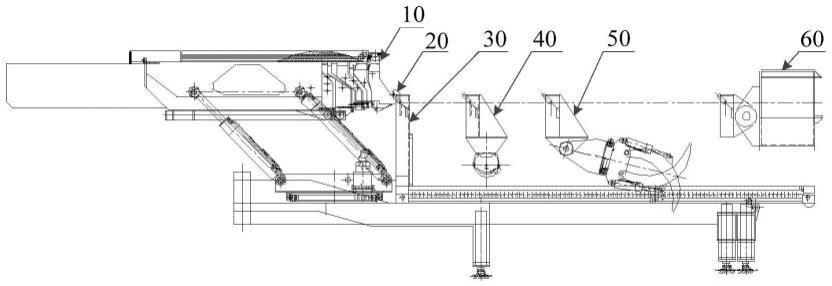
17.图1为本发明提供的救援设备属具作业控制系统一实施例的结构示意图;
18.图2为图1中所示的io模块总成一实施例的结构示意图;
19.图3为本发明提供的救援设备属具作业控制系统一实施例的电气控制原理示意图;
20.图4为本发明提供的救援设备属具作业控制系统一实施例的应用示意图。
21.附图标号说明:
22.10、臂架;20、标准固定接口;30、属具托盘;40、卷场起吊装置;50、抓手装置;60、工作斗装置;70、io模块总成;71、控制盒;72、io模块;73、端子排;74、电缆连接器。
具体实施方式
23.为了更好的理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案做详细的说明。
24.如图1至图4所示,本发明第一实施例提出一种本救援设备属具作业控制系统,包括臂架10、标准固定接口20、属具托盘30、卷场起吊装置40、抓手装置50和工作斗装置60,卷场起吊装置40、抓手装置50和工作斗装置60放置于属具托盘30上,标准固定接口20设于臂架10的头部,用于根据不同的需求,安装卷场起吊装置40、抓手装置50或工作斗装置60三种不同属具中的一种属具,以分别进行吊载、抓取或高空作业三种不同作业工况中的任意一种作业工况;臂架10的头部设有io模块总成70,io模块总成70靠近标准固定接口20的附近设置,用于分别控制卷场起吊装置40、抓手装置50或工作斗装置60进行吊载、抓取或高空作业。在本实施例中,标准固定接口20、属具托盘30、卷场起吊装置40、抓手装置50和工作斗装置60采用现有的装置,标准固定接口20可适配卷场起吊装置40、抓手装置50和工作斗装置60。
25.进一步地,请见图2和图3,本实施例提出的救援设备属具作业控制系统,io模块总成70包括控制盒71、以及设于控制盒71上的io模块72、端子排73和电缆连接器74,io模块72分别与端子排73和电缆连接器74电连接,电缆连接器74用于与卷场起吊装置40、抓手装置50和工作斗装置60三种不同属具的电缆连接器74直接对插;io模块72用于自动判断属具的类型,并进行相应的逻辑运算控制。具体地,io模块72包括第一开关量输入端口xm1.15、第二开关量输入端口xm1.25和第三开关量输入端口xm1.26,电缆连接器74通过第一导线与第一开关量输入端口xm1.15电连接,电缆连接器74通过第二导线与第二开关量输入端口xm1.25电连接,电缆连接器74通过第三导线与第三开关量输入端口xm1.26电连接。在本实施例中,io模块72采用的型号为epec3606。本实施例提出的救援设备属具作业控制系统,实现1个io模块可以控制3个不同的属具,模块的安全性和稳定性也得到保障。
26.优选地,请见图2和图3,本实施例提出的救援设备属具作业控制系统,io模块72用于识别到对插的属具是抓手装置50后,则向第一开关量输入端口xm1.15输入高电平;若识别到对插的属具是工作斗装置60后,则向第二开关量输入端口输入高电平;若识别到对插的属具是卷场起吊装置40后,则向第三开关量输入端口输入高电平。其中,属具的识别可以采用现有的视频ai智能识别控制系统进行识别。io模块72包括第一pwm输出端口xm1.7、第二pwm输出端口xm1.8、第三pwm输出端口xm1.9和第四pwm输出端口xm1.10,若io模块72接收底盘控制总线传送过来的抓手指令后,则向第一pwm输出端口xm1.7、第二pwm输出端口xm1.8、第三pwm输出端口xm1.9或第四pwm输出端口xm1.10输出相应的电流控制信号,控制
相应电磁阀动作。具体地,抓手指令包括抓手伸出指令、抓手缩回指令、抓手左转指令和抓手右转指令,io模块72用于若接收的抓手指令为抓手伸出指令时,则向第一pwm输出端口xm1.7输出第一电流控制信号,控制抓手伸出电磁阀-4y24动作,促使抓手伸出。若接收的抓手指令为抓手缩回指令时,则向第二pwm输出端口xm1.8输出第二电流控制信号,控制抓手缩回电磁阀-4y25动作,促使抓手缩回。若接收的抓手指令为抓手左转指令时,则向第三pwm输出端口xm1.9输出第三电流控制信号,控制抓手左转电磁阀-4y26动作,促使抓手左转。若接收的抓手指令为抓手右转指令时,则向第四pwm输出端口xm1.10输出第四电流控制信号,控制抓手右转电磁阀-4y27动作,促使抓手右转。io模块72包括第五pwm输出端口、第六pwm输出端口和第七pwm输出端口,若io模块72接收底盘控制总线传送过来的工作斗指令后,则向第五pwm输出端口、第六pwm输出端口或第七pwm输出端口输出相应的电流控制信号,控制相应电磁阀动作。具体地,工作斗指令包括工作斗属具指令、工作斗降落指令和工作斗升起指令,io模块72用于若接收的工作斗指令为工作斗属具指令时,则向第五pwm输出端口输出第五电流控制信号,控制工作斗属具电磁阀-4y28动作,促使工作斗属具安装于标准固定接口20上。若接收的工作斗指令为工作斗降落指令时,则向第六pwm输出端口输出第六电流控制信号,控制工作斗降落电磁阀-4y29动作,促使工作斗降落。若接收的工作斗指令为工作斗升起指令时,则向第七pwm输出端口输出第七电流控制信号,控制工作斗升起电磁阀-4y30动作,促使工作斗升起。io模块72包括第八pwm输出端口和第九pwm输出端口,若io模块72接收底盘控制总线传送过来的卷扬指令后,则向第八pwm输出端口或第九pwm输出端口输出相应的电流控制信号,控制相应电磁阀动作。具体地,卷扬指令包括卷扬降落指令和卷扬升起指令,io模块72用于若接收的卷扬指令为卷扬降落指令时,则向第八pwm输出端口输出第八电流控制信号,控制卷扬降落电磁阀-4y22动作,促使卷扬降落。若接收的卷扬指令为卷扬升起指令时,则向第九pwm输出端口输出第九电流控制信号,控制卷扬升起电磁阀-4y23动作,促使卷扬升起。本实施例提供的救援设备属具作业控制系统,自动识别属具类型并进行相应的功能操作,不同属具对应控制不同的端口电流,不同的属具系统配置不同的控制参数,自动化程度和安全系数高;降低成本,实现1个io模块可以控制3个不同的属具,模块的安全性和稳定性也得到保障。
27.如图1至图4所示,本实施例提供的救援设备属具作业控制系统,其工作原理为:
28.本实施例涉及的救援设备属具作业控制系统,能自动识别外部属具并进行相应控制操作。属具作业系统主要包含臂架10、标准固定接口20、属具托盘30、卷扬起吊装置40、抓手装置50和工作斗装置60。根据不同的需求,臂架10头部的标准固定接口20可以安装卷扬起吊装置40或者抓手装置50或工作斗装置60,分别进行吊载/抓取/高空作业等3种不同的作业工况,属具作业系统见图1所示。
29.利用一个epec-3606的io模块72实现控制3个不同的属具:卷扬起吊装置40、抓手装置50、工作斗装置60。io模块总成70安装在臂架10的头部,靠近标准固定接口20的附近;io模块总成70由控制盒71、epec-3606io模块72、端子排73和电缆连接器74组成,io模块总成70见图2所示。3种不同属具的电缆连接器74直接可以与io模块总成70上的电缆连接器74直接对插。
30.控制原理:如果属具是抓手装置50,则其电缆连接器74中有一导线将+24v高电平引入第一开关量输入端口xm1.15;如果属具是工作斗装置60,则其电缆连接器74中有一导
线将+24v高电平引入第二开关量输入端口xm1.25;如果属具是卷扬起吊装置40,则第三开关量输入端口xm1.26引入高电平;电气控制原理图如图3所示。这样不同的属具与io模块总成70中的电缆连接器74连接后,io模块72能够自动判断属具的类型,并进行相应的逻辑运算控制,即第一开关量输入端口xm1.15为高电平时,通过底盘控制总线给epec-3606io模块发送抓手伸/缩、抓手左转/右转指令时,io模块72将通过xm1.7/xm1.8/xm1.9/xm1.10四个pwm输出端口输出相应的电流信号,控制相应电磁阀的动作。当第二开关量输入端口xm1.25为高电平时,一旦底盘控制总线给epec-3606io模块72发送工作斗指令时,io模块72将通过xm1.8/xm1.9/xm1.10三个pwm输出端口输出相应的电流信号,控制工作斗电磁阀的相应动作。同理当第三开关量输入端口xm1.26为高电平时,xm1.9/xm1.10两个pwm输出端口将控制卷扬降落/升起的相应动作。
31.这样,io模块72通过电缆连接器74的不同接线方式自动识别属具的类型,实现相应的控制,同时通过io模块72软件屏蔽错误的动作,即不同的属具,对应的pwm输出端口的参数配置也不相同。
32.尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1