一种智能家居水净化海藻滤芯生产设备的制作方法
1.本发明涉及海藻滤芯生产设备技术领域,具体涉及一种智能家居水净化海藻滤芯生产设备。
背景技术:
2.智能家居水净化海藻滤芯,其主要安装于家用净水器内的,用于过滤自来水、井水等饮用水中的杂质等,从而使得硬水在净水器的作用下转化为软水。
3.在其生产环节的中,人工对生产完整的海藻滤芯进行搬运收集,流水线作业下纯粹以人力进行搬运,需要工人保持高度的工作积极性,以避免发生海藻滤芯堆积的问题。
技术实现要素:
4.本发明的目的是提供一种智能家居水净化海藻滤芯生产设备,用于解决上述问题。
5.为了实现上述目的,本发明提供如下技术方案:一种智能家居水净化海藻滤芯生产设备,包括:
6.堆料台,其用于堆放海藻滤芯;
7.取料机构,其包括弧形取料部及与所述弧形取料部外侧弧顶相连接的第一连接臂,所述第一连接臂的端部受驱摆动以使的弧形取料部顶承所述海藻滤芯;
8.送料机构,其包括接料板及对称布置且一端连接于所述接料板相对两侧侧壁的第二连接臂,所述第二连接臂受驱摆动并在摆动行程的两个终止位上分别完成以下工位:
9.第一工位,承接所述弧形取料部倾倒的所述海藻滤芯;
10.第二工位,倾倒所述海藻滤芯堆放至所述堆料台内。
11.作为优选的,所述接料板具体为“l”型结构,且之间的夹角保持在100
°‑
108
°
之间,两个所述第二连接臂的一端与所述“l”型结构连接部相连接。
12.作为优选的,所述第一连接臂具体为钝角三角形结构,其三个顶点分别为第一顶点、第二顶点以及第三顶点,所述弧形取料部与所述第一顶点固定连接;
13.所述取料机构还包括第三连接臂、第四连接臂及第五连接臂;
14.所述第三连接臂的一端为定点转动连接,另一端则转动连接于所述第一连接臂的第二顶点;
15.所述第四连接臂的一端转动连接于所述第三顶点上;
16.所述第五连接臂的一端为定点转动连接,另一端则转动连接于所述第四连接臂上,其中:
17.所述第五连接臂与所述第三连接臂定点转动连接的一端处于同于水平面。
18.作为优选的,还包括驱动机构,所述驱动机构包括对称分布的驱动盘,所述第四连接臂一端转动连接于所述驱动盘上,且偏离所述驱动盘轴心布置;
19.所述第五连接臂一端靠近所述驱动盘转动连接于所述第四连接臂上。
20.作为优选的,所述送料机构还包括连杆组件,所述连杆组件用于驱使所述接料板在第一工位下保持两个运动状态:
21.第一种运动装态,受驱偏转以与向高位运动的所述弧形取料部靠拢;
22.第二种运动装态,至所述弧形取料部之间间距最小时,所述接料板在偏转过程中以向两个所述弧形取料部之间延伸。
23.作为优选的,所述弧形取料部和第一连接臂数量为两个,并对称布置;
24.所述接料板竖直部的端部设置有延伸部,且竖直部和所述延伸部之间的夹角为165
°‑
170
°
,第一工位下,所述延伸部延伸两个所述弧形取料部之间,以将所述海藻滤芯挑拨入所述竖直部上。
25.作为优选的,两个所述弧形取料部和两个所述第一连接臂之间设置有多个连接杆。
26.作为优选的,所述连杆组件包括等腰三角形连接臂、第六连接臂以及第七连接臂;
27.所述第六连接臂的一端转动连接于所述第二连接臂的端部、另一端为定点转动连接;
28.所述第七连接臂的一端转动连接于所述等腰三角形连接臂的第一定点上,另一端则为定点转动连接;
29.所述等腰三角形连接臂的第二定点转动连接于所述第二连接臂上并靠近所述第六连接臂分布。
30.作为优选的,还包括驱动机构,所述驱动机构包括对称分布的驱动盘以及一端转动连接于所述驱动盘上的第四连接臂,所述等腰三角形连接臂的第三定点与位于所述驱动盘上的所述第四连接臂一端为转动连接;
31.所述第七连接臂定点转动连接的一端高于所述驱动盘竖直方向的高度。
32.在上述技术方案中,本发明提供的一种智能家居水净化海藻滤芯生产设备,具备以下有益效果:上述技术方案中弧形取料部在第一连接臂的驱动保持偏转运动,并在转动过程中将生产的成品海藻滤芯从传送带带抓起,并进行搬运至接料板处,第二连接臂受驱使得接料板承接弧形取料部倾倒的海藻滤芯,并将其搬运至堆料台内,自动化水平高,相比人工而言连续性强,提供了生产效率,降低了人工带来的相关成本问题。
附图说明
33.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
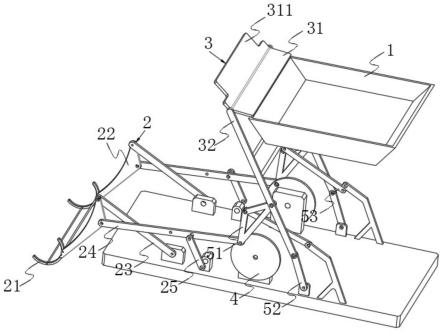
34.图1为本发明实施例提供的整体结构示意图;
35.图2为本发明实施例提供的取料机构的结构示意图;
36.图3为本发明实施例提供的送料机构的结构示意图;
37.图4为本发明实施例提供的接料板的结构示意图;
38.图5为本发明实施例提供的送料机构的爆炸结构示意图。
39.附图标记说明:
40.1、堆料台;2、取料机构;21、弧形取料部;22、第一连接臂;23、第三连接臂;24、第四
连接臂;25、第五连接臂;3、送料机构;31、接料板;311、延伸部;32、第二连接臂;4、驱动盘;51、等腰三角形连接臂;52、第六连接臂;53、第七连接臂;6、底座;7、第一连接块;8、第二连接块;9、第三连接块;10、支撑架。
具体实施方式
41.为了使本领域的技术人员更好地理解本发明的技术方案,下面将结合附图对本发明作进一步的详细介绍。
42.如图1-5所示,一种智能家居水净化海藻滤芯生产设备,包括:
43.堆料台1,其用于堆放海藻滤芯;
44.取料机构2,其包括弧形取料部21及与弧形取料部21外侧弧顶相连接的第一连接臂22,第一连接臂22的端部受驱摆动以使的弧形取料部21顶承海藻滤芯;
45.送料机构3,其包括接料板31及对称布置且一端连接于接料板31相对两侧侧壁的第二连接臂32,第二连接臂32受驱摆动并在摆动行程的两个终止位上分别完成以下工位:
46.第一工位,承接弧形取料部21倾倒的海藻滤芯;
47.第二工位,倾倒海藻滤芯堆放至堆料台1内。
48.具体的,上述实施例中结合图2可知,第一连接臂22具体为钝角三角形结构,其三个顶点分别为第一顶点、第二顶点以及第三顶点,弧形取料部21与第一顶点固定连接;
49.取料机构2还包括第三连接臂23、第四连接臂24及第五连接臂25;
50.第三连接臂23的一端为定点转动连接,另一端则转动连接于第一连接臂22的第二顶点;
51.第四连接臂24的一端转动连接于第三顶点上;
52.第五连接臂25的一端为定点转动连接,另一端则转动连接于第四连接臂24上,其中:
53.第五连接臂25与第三连接臂23定点转动连接的一端处于同于水平面。
54.上述技术方案中,底座6的顶部对称设置有第一连接块7和第二连接块8,且第一连接块7和第二连接块8的高度一致,轴承位置一致。实施例中第五连接臂25的一端与第二连接块8实现定点转动连接,而第四连接臂24则与第一连接块7实现定点转动连接。
55.进一步的,上述实施例中的,结合图4和图5可知,送料机构3还包括连杆组件,连杆组件用于驱使接料板31在第一工位下保持两个运动状态:
56.第一种运动装态,受驱偏转以与向高位运动的弧形取料部21靠拢;
57.第二种运动装态,至弧形取料部21之间间距最小时,接料板31在偏转过程中以向两个弧形取料部21之间延伸。
58.更为进一步的,连杆组件包括等腰三角形连接臂51、第六连接臂52以及第七连接臂53;
59.第六连接臂52的一端转动连接于第二连接臂32的端部、另一端为定点转动连接;
60.第七连接臂53的一端转动连接于等腰三角形连接臂51的第一定点上,另一端则为定点转动连接;
61.等腰三角形连接臂51的第二定点转动连接于第二连接臂32上并靠近第六连接臂52分布。
62.在具体的实施例过程中,底座6的顶部对称设置有第三连接块9和支撑架10,第三连接块9与第一连接块7、第二连接块8的高度一致,轴承位置一致。而支撑架10的轴承位置则高于上述三个连接块。进一步的,实施例中的第六连接臂52与第三连接块9实现定点转动连接,而第七连接臂53则与支撑架10实现定点转动连接。
63.作为本实用进一步提供的技术方案,还包括驱动机构,驱动机构包括对称分布的驱动盘4以及一端转动连接于驱动盘4上的第四连接臂24,等腰三角形连接臂51的第三定点与位于驱动盘4上的第四连接臂24一端为转动连接;而第七连接臂53定点转动连接的一端高于驱动盘4竖直方向的高度。在具体的操作过程中,驱动盘4受到电机驱动保持旋转,由于等腰三角形连接臂51的第三定点、第四连接臂24的一端均是转动安装于驱动盘4侧边且靠近边沿分布的轴承上,则当驱动盘4旋转一圈过程中会完成以下动作:
64.当弧形取料部21顶驱海藻滤芯的时候,则驱动盘4上的轴承位于上方,则第四连接臂24位于驱动盘4的一端向上,而另一端则向下,同时在第三连接臂23则会顶推第一连接臂22的第二顶点从而使得整个弧形取料部21的端口朝向更改至图1所示状态;
65.当驱动盘4顺时针旋转过程中,等腰三角形连接臂51跟随驱动盘4的轴承同步移动,牵拉从而使得第二连接臂32朝向弧形取料部21一侧移动,同时随着第四连接臂24的移动,其与弧形取料部21连接的一端开始向上偏转靠近接料板31,即第一种运动装态;
66.当驱动盘4的轴承即将到达下方的时候,则弧形取料部21和接料板31间距最小,此时等腰三角形连接臂51在第七连接臂53牵拉限制下使得第二连接臂32顶升,同时整个第二连接臂32作用在第六连接臂52上,则第六连接臂52朝向支撑架10方向摆动到极限,此时的接料板31向后推,而伴随着驱动盘4的继续旋转,轴承开始从下方朝上方旋转的时候,则等腰三角形连接臂51受到驱动盘4作用带动第七连接臂53向上,从而在偏转的过程中发生前移的动作,即第二种运动装态;
67.而随着驱动盘4继续旋转,则弧形取料部21呈图2所示状态,而接料板31处于图3状态,此时的海藻滤芯由弧形取料部21内被倾倒至接料板31内,并滑落至接料板31上,即第一工位;而当驱动盘4旋转至轴承位于上方的时候,则弧形取料部21回到初始位进行取海藻滤芯,而接料板31则将海藻滤芯倾倒至堆料台1,即第二工位。
68.上述技术方案中弧形取料部21在第一连接臂22的驱动保持偏转运动,并在转动过程中将生产的成品海藻滤芯从传送带带抓起,并进行搬运至接料板31处,第二连接臂32受驱使得接料板31承接弧形取料部21倾倒的海藻滤芯,并将其搬运至堆料台1内。利用自动化机械取代人工搬运,极大的提供了工作效率,同时也降低了工人的人员成本。
69.作为本发明进一步提供的技术方案,接料板31具体为“l”型结构,且之间的夹角保持在100
°‑
108
°
之间,两个第二连接臂32的一端与“l”型结构连接部相连接。
70.在具体的实施例中,海藻滤芯由弧形取料部21内被倾倒至接料板31内,并滑落至接料板31上,则会滑落至接料板31夹角处。而当接料板31翻转至图1所示状态的夹角朝向斜上方,而竖直部呈倾斜状,海藻滤芯从下滚至堆料台1内。
71.作为本发明进一步提供的技术方案,弧形取料部21和第一连接臂22数量为两个,并对称布置;而接料板31竖直部的端部设置有延伸部311,且竖直部和延伸部311之间的夹角为165
°‑
170
°
,第一工位下,延伸部311延伸两个弧形取料部21之间,以将海藻滤芯挑拨入竖直部上。
72.再者,两个弧形取料部21和两个第一连接臂22之间设置有多个连接杆。
73.以上只通过说明的方式描述了本发明的某些示范性实施例,毋庸置疑,对于本领域的普通技术人员,在不偏离本发明的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,上述附图和描述在本质上是说明性的,不应理解为对本发明权利要求保护范围的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1